

МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РФ
Федеральное государственное бюджетное образовательное учреждение
высшего профессионального образования
«МОСКОВСКИЙ АВИАЦИОННЫЙ ИНСТИТУТ»
(НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ УНИВЕРСИТЕТ)
Кафедра: «Испытания летательных аппаратов»
Курсовая работа по дисциплине «Планирование экспериментов (методология научных исследований)»
На тему «Планирование автономных многофакторных испытаний системы управления поворотным соплом двигательной установки летательного аппарата»
Выполнил: Е.К. Гапич
Группа: 2РКК-1ДМБ-336
Дата сдачи: _______________
Подпись: _________________
Проверил: В.И. Круглов
Дата: ____________________
Подпись: _________________
Москва 2015
Содержание
СОДЕРЖАНИЕ 2
ВВЕДЕНИЕ 3
1.ВЫБОР УРОВНЕЙ ФАКТОРОВ 5
2.ПОРЯДОК ПРОВЕДЕНИЯ ИСПЫТАНИЙ 9
3. АНАЛИЗ РЕЗУЛЬТАТОВ ИСПЫТАНИЙ 11
ВЫВОДЫ 18
СПИСОК ИСПОЛЬЗОВАНЫХ ИСТОЧНИКОВ 19
Введение
В последнее время в технике широко внедряется совокупность передовых методов статистической обработки результатов различных экспериментов — теория планирования экспериментов. Планирование эксперимента — это процедура выбора числа и условий проведения опытов, необходимых и достаточных для решения поставленной задачи с требуемой точностью.
При планировании испытаний существенно стремление к минимизации их числа, к сокращению времени на их проведение и обработку результатов; одновременное варьирование по специальным алгоритмам всеми переменными, определяющими процесс (в случае управляемого эксперимента); использование математического аппарата, формализующего многие действия экспериментатора; выбор четкой стратегии принятия обоснованных решений после каждой серии экспериментов.
Создается также при наличии формализованных решений база для автоматизации циклов планирования и проведения операций контроля и испытаний с помощью ЭВМ.
Исследование начинается обычно с обработки априорной информации по испытаниям натурных объектов, выбора вида модели, разработки специальной рабочей модели, предназначенной для конкретных исследований.
Если исследуется новое явление, то с помощью создаваемой модели «нащупывается» его схема. Такое приближенное отображение процесса фиксируется концептуальными или феноменологическими моделями, которые дают условное представление о процессе — его скелетную схему.
Важным вопросом является обеспечение научной основы для планирования испытаний и прогнозирования изменений основных параметров, что должно предшествовать всякому внедрению систем в производство.
Данный вид испытаний в иерархической структуре занимает ступень наземных автономных испытаний для отдельных бортовых систем.
Применяя методы планирования эксперимента в разработке указанных технологических процессов, возникает возможность формализовать ряд операций подготовки и проведения испытаний и оптимизации технологического цикла.
Выбор уровней факторов
На современных ракетах-носителях (PH) в качестве органов управления используются шарнирно закрепленные камеры сгорания двигательной установки (ДУ), при повороте которых относительно продольной оси ракеты на некоторый угол возникают силы, управляющие ракетой по углам курса и тангажа.
Поворот камеры осуществляет рулевая машинка (РМ) — исполнительный орган такой системы (рисунок 1). На работоспособность всей системы управления ДУ существенное значение оказывает величина шарнирного момента в поворотном узле камеры
Mш=F*h,
где F — усилие, развиваемое РМ; h — плечо действия РМ.
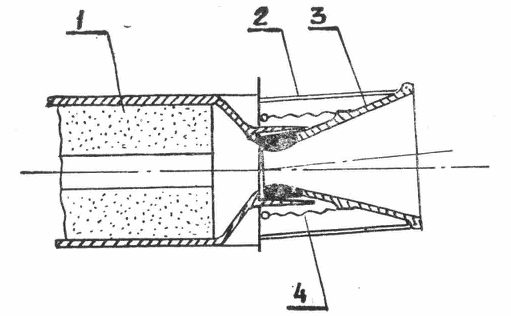
Рисунок 1 Схема камеры ДУ с шарнирно закрепленным соплом.
Камера ДУ. 2. Тяга управления соплом. 3. Сопло. 4. Мембрана.
Анализируя условия функционирования системы, можно отметить, что М или, что практически равносильно, F (в дальнейшем будем оперировать только характеристикой F, поскольку Мш и F относятся через величину h — постоянный конструктивный параметр рассматриваемого типа ДУ) зависит от следующих факторов:
угла поворота камеры α;
угловой скорости ω вращения камеры, задаваемой командными органами системы;
перепада давления ∆р в отсеке ДУ, где установлена РМ, по отношению к внешней среде, т. е. атмосфере.
Последний фактор связан с конструктивной особенностью данной системы управления. Поскольку камера подвижна, то двигательный отсек должен закрываться не жестким днищем, как обычно, а своеобразной мембраной, достаточно гибкой для обеспечения необходимой подвижности камере ДУ. Вследствие своей упругости такая мембрана будет оказывать различное воздействие на РМ в зависимости от величины ∆р на активном участке траектории.
Указанные факторы являются основными и должны быть включены в ТУ на автономные наземные испытания данной системы и в ТЗ па проектирование соответствующего стенда.
В процессе выполнения курсовой работы студенты должны также исследовать, какие факторы в процессе эксплуатации данной системы могут воздействовать на нее второстепенно и определить их место в классификации. Для этого удобно рассмотреть процесс работы системы как некоторое физическое явление и составить его концептуальную (феноменологическую) схему. В основе такой схемы положена структура физических связей, наложенных на испытываемый объект (процесс), их возможные взаимодействия. При этом можно показать их классификационную подчиненность, как внешних факторов.
Существенно здесь также разработать и использовать в исследовании информационную модель испытаний. Информационная модель процесса обычно определяется как совокупность текущей информации о состоянии объекта (испытания, исследования), о воздействиях на него со стороны внешней среды, о положении командных органов, поступающей от специальных средств отображения информации (СОИ), с указанием их структурных связей.
Различаются два уровня концептуальной модели: постоянная и оперативная концептуальные модели. Постоянная концептуальная модель концентрирует всю совокупность знаний и практического опыта о данном типе явлений (процессов), например, о процессе взаимодействия окружающей среды и летательного аппарата в процессе эксплуатации.
При проведении конкретных испытаний концептуальная модель выступает на оперативном уровне, на котором выделяются лишь сведения, определяющие данный процесс в указанном промежутке времени. Сравнивая определенными методами данную модель с информационной моделью в контрольные отрезки времени, можно выработать набор действий, т. е. некоторый (оптимальный) технологический процесс, позволяющий переводить объект в заданное состояние.
Неточное или неполное отражение исследуемого процесса информационной моделью может отрицательно сказаться на содержании оперативной концептуальной модели, привести к выбору ошибочных операций в технологическом процессе.
Допустим, для исследуемой системы основные факторы заданы следующими количественными характеристиками: для угла поворота камеры ДУ от —10° до +10°; для угловой скорости три дискретных значения ω1= 5 град/с; ω2= 10 град/с; ω3 = 20 град/с; для перепада давлений от —2,0 МПа до +2,0 МПа.
Для
угловой скорости очевидны 3 дискретных
уровня, определяемых схемой привода
ДУ —
ω1,
ω2,
ω3.
Для угла поворота диапазон изменения
фактора удобно разбить на ряд одинаковых
интервалов в количестве, достаточном
для определения неизвестной кривой.
Допустим, контрольное оборудование
стенда позволяет без больших динамических
ошибок фиксировать значения функции
отклика — усилие на РМ — через каждые
2 градуса поворота камеры. Поскольку
вид ![]() неизвестен, примем в первом приближении
величину интервала для
α
— 2 градуса; получим 11 уровней в заданном
диапазоне α (от +10° до —10°). Так же
определим величину интервала для ∆р,
равную 0,5 МПа. Получим 9 уровней в
заданном диапазоне
∆р.
Естественно, что после первого испытания
определится вид функциональных
зависимостей, и необходимо будет уточнить
величины интервалов и их количество
(для нашего случая уменьшить).
неизвестен, примем в первом приближении
величину интервала для
α
— 2 градуса; получим 11 уровней в заданном
диапазоне α (от +10° до —10°). Так же
определим величину интервала для ∆р,
равную 0,5 МПа. Получим 9 уровней в
заданном диапазоне
∆р.
Естественно, что после первого испытания
определится вид функциональных
зависимостей, и необходимо будет уточнить
величины интервалов и их количество
(для нашего случая уменьшить).