

Безруков А.В. ОСНОВЫ ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ
.pdfМинистерство образования и науки Российской Федерации Балтийский государственный технический университет «Военмех» кафедра информационных систем и технологий
Безруков А.В.
ОС Н О В Ы Ц И Ф Р О В О Й О Б Р А Б О Т К И
СИ Г Н А Л О В
У ч е б н о е п о с о б и е
Санкт – Петербург
2015
1
Введение
Цифровая обработка сигналов непрерывных и дискретных сигналов как новое техническое направление оформилось в середине шестидесятых годов прошлого века. Сфера применения цифровой обработки сигналов непрерывно расширяется в связи с тем, что с помощью специализированных устройств на интегральных схемах (процессоров ЦОС) или универсальных вычислительных машин можно получить новые результаты, недостижимые при использовании аналоговых сигналов.
Областью применения ЦОС являются: обработка сигналов в радио-, гидро- и звуколокации, сжатие данных, анализ спектра, цифровые методы измерений, обработка сигналов в геологоразведке, метрологии, сейсмологии, медицине и т. д.
Большой интерес к цифровым устройствам обработки сигналов объясняется рядом их преимуществ, среди которых отметим наиболее важные из них:
цифровые фильтры не имеют реактивных элементов и поэтому при их разработке исключаются все проблемы, связанные с точностью изготовления и стабильностью этих элементов;
цифровые фильтры выполняются на интегральных схемах, поэтому могут быть экономичными и иметь малые размеры и потребление;
цифровые фильтры могут моделироваться на универсальной вычислительной машине, что удобно на ранней стадии разработки при сравнительном анализе различных вариантов исполнения фильтров;
характеристические частоты цифровых фильтров зависят от внешней тактовой частоты. Изменяя эту частоту, можно легко перестраивать фильтр, что дает возможность использовать их в адаптивных и следящих системах;
цифровые фильтры имеют высокую стабильность, определяемую стабильностью генератора тактовой частоты. Это позволяет реализовать фильтры с очень высокой добротностью или чрезвычайно большими постоянными времени;
при разработке цифровых фильтров не возникает проблема согласования нагрузок;
цифровые фильтры не имеют дрейфа, присущего активным фильтрам и т. д.
Вто же время следует иметь в виду, что в отличие от аналоговых
фильтров работа цифровых фильтров сопровождается образованием специфических шумов, связанных с процессами дискретизации и квантования, а также за счет неизбежного округления чисел при проведении вычислений.
2

1. Основные понятия цифровой обработки сигналов
1.1.Общие замечания
Общее представление о принципе цифровой (дискретной) обработки непрерывного сигнала можно получить из рассмотрения схемы, изображѐнной на рисунке 1.1.
x(t) |
x(nT) |
|
x(nT ) |
Цифровое |
y(nT) |
Выходное |
s (t) |
|
Квантизатор |
счетное |
|||||||
|
Дискретизатор |
|
|
устройство |
|
|||
|
|
|
|
устройство |
|
|
||
|
|
|
|
|
|
|
||
|
АЦП |
|
|
|
|
|
|
|
|
|
Рисунок 1.1. Обобщенная схема ЦОС |
|
|
|
|||
При этом сигнал на входе представляет собой аддитивную смесь вида x(t) = s(t) + p(t), где s — полезная информация; p(t) — помеховая составляющая входного сигнала.
Как и при непрерывной (аналоговой) обработке целью преобразования сигнала x(t) в вектор сигналов Y (nT) является выделение полезной составляющей s(t).
Обобщѐнная схема ЦОС (см. рисунок 1.1) отображает последовательность процедур, необходимых для преобразования сигнала x(t) в другой аналоговый сигнал S (t) по заданному алгоритму средствами цифровой вычислительной техники.
В ЦОС можно выделить три основных этапа:
1)формирование дискретного сигнала X (nT) из исходного аналогового сигнала x(t);
2)преобразование дискретного сигнала X (nT) в цифровой сигнал Y (nT);
3)формирование результирующего (аналогового) сигнала из цифрового сигнала S (nT).
Первый этап в свою очередь делится на два подэтапа: дискретизацию и
квантование.
Дискретизация по времени (дискретизация) представляет собой процедуру взятия мгновенных значений — отсчѐтов — аналогового сигнала x(t) с интервалом времени, равным периоду дискретизации Т. Значение
3
отсчѐтов x(nT) совпадают со значениями сигнала x(t) в моменты времени t = nT:
Совокупность отсчѐтов x(nT), n = 0, 1, … называют дискретным сигналом.
Квантование по уровню (квантование) проводится с целью представления точных значений отсчѐтов x(nT) в виде двоичных чисел конечной разрядности — квантованных отсчѐтов x (nT). Для этого динамический диапазон дискретного сигнала x(nT) разбивается на конечное число дискретных уровней — уровней квантования — и каждому отсчѐту по определѐнному правилу присваивается значение одного из ближайших уровней, между которыми он оказывается. Совокупность квантованных отсчѐтов x (nT), n = 0, 1, 2, … называют цифровым сигналом. В процессе квантования возникают ошибки квантования
|
|
|
|
екв(nt) = x(nT) – x (nT), |
(1.2) |
||
которые называют шумами квантования.
На втором этапе устройство цифровое счѐтное (в дальнейшем устройство ЦОС) преобразует цифровой сигнал x (nT) в цифровой сигнал Y (nT) по заданному алгоритму. О возможных алгоритмах ЦОС будем говорить несколько позже.
Наконец, на третьем этапе, полученный цифровой сигнал может быть либо преобразован в аналоговый, либо подвержен дальнейшей цифровой обработке (т.н. вторичная обработка). В первом случае в качестве выходного устройства используется устройство цифро-аналогового преобразования (ЦАП), а во втором случае и в качестве выходного устройства может быть использовано ещѐ одно устройство ЦОС (универсальная ЭВМ, контроллер и т.п.).
В заключение несколько слов о выборе величины интервала дискретизации Т, который выбирается из теоремы Котельникова и равен
T = 1/fд = 1/2fв, |
(1.3) |
где fв — верхняя частота спектра входного сигнала. Описанные процедуры иллюстрирует рисунок 1.2.
4
x(nT)
 x(t)
x(t)
t
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
x(nT )
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
8 |
|
9 |
10 |
11 |
12 |
13 |
14 |
|
|
16 |
|||||||
|
|
15 |
|||||||||||||||||||||||
y(nT)
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
t
t
5

s(t)
t
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
Рисунок 1.2
1.1.1. Дискретизация аналогового сигнала
Очевидным требованием при дискретизации является наличие принципиальной возможности восстановления первоначального аналогового сигнала из дискретизованного. Рассмотрим особенности спектра дискретизированного сигнала. Этот спектр совпадает по своей форме со спектром амплитудно-модулированного импульсного колебания (АИМколебания), который изучается в курсе «Радиотехнические цепи и сигналы».
На рисунке 1.3 показан спектр (двусторонний) дискретизированного сигнала в предположении, что форма дискретизирующих импульсов, осуществляющих выборки аналогового сигнала, близка к прямоугольной.
Этот спектр содержит спектр исходного аналогового сигнала и его копии, повторяющиеся с периодом fд. Спектр исходного аналогового сигнала расположен в полосе 2fв (на рисунке заштрихован). График соответствует случаю, когда fд > 2fв. Восстановление исходного аналогового сигнала x(t) при этом возможно с помощью идеального фильтра нижних частот (ФНЧ) с прямоугольной формой огибающей.
6

Если fд < 2fв, то восстановление исходного сигнала оказывается невозможным. При этом возникают ошибки двух родов: связанные с усечением спектра исходного сигнала и с положением копий спектра, появляющихся в процессе дискретизации.
На рисунке 1.4 показан случай fд < 2fв. Как видно, идеальный ФНЧ выделяет составляющие спектра, расположенные в интервале Найквиста, т.е. в диапазоне частот 0…fд/2. При этом отсекается часть спектра исходного сигнала в диапазоне частот fд/2…fв и возникает ОШИБКА УСЕЧЕНИЯ. В то же время в полосу пропускания идеального фильтра попадают составляющие от копии спектра, вызывающие ЭФФЕКТ НАЛОЖЕНИЯ спектров (эйлайзинг).
Рассмотренный пример иллюстрирует вывод о необходимости соблюдения требований теоремы отсчетов о соотношении между частотами fд и fв. Чтобы избежать вышеперечисленных ошибок, на входе АЦП обычно ставят ограничивающий фильтр (ОФ).
1.2. Основная полоса частот. Нормирование частоты
Как было показано в предыдущем подразделе, верхняя частота аналогового сигнала fв согласно теореме Котельникова не должна превышать половины частоты дискретизации этого сигнала. Следовательно, дискретные сигналы целесообразно рассматривать в области [0; fд/2], которая называется ОСНОВНОЙ ПОЛОСОЙ ЧАСТОТ или ОСНОВНЫМ ДИАПАЗОНОМ ЧАСТОТ.
Это позволяет ввести понятие нормированных частот:
fˆ — отношение текущей частоты f к частоте дискретизации fд
fˆ = |
f |
= fT; |
(1.4) |
|
|||
|
f Д |
|
|
|
7 |
|
|
ˆ — отношение текущей круговой частоты ω к частоте
дискретизации fд
ˆ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
f Д |
= ωT. |
|
|
|
|
|
(1.5) |
||||||||||
Как нетрудно убедиться, нормированные |
частоты |
fˆ |
и ˆ связаны |
|||||||||||||||
|
||||||||||||||||||
соотношением |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
2 f |
|
ˆ |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
f Д |
= |
|
|
f Д |
= 2π f . |
|
|
(1.6) |
|||||||||
ˆ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В зависимости от выбранной шкалы частот ОСНОВНАЯ ПОЛОСА |
||||||||||||||||||
соответствует областям: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f [0; |
|
f Д |
|
]; |
|
|
|
|
|
|
(1.7) |
|||||||
|
2 |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
fˆ [0; 0,5] |
|
|
|
|
|
(1.8) |
||||||||||||
[0; |
|
|
Д |
|
]=[0; |
|
] |
|
|
(1.9) |
||||||||
|
|
|
|
|
|
|
|
|
||||||||||
|
|
2 |
|
Т |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
ˆ |
|
|
|
|
|
|
|
] |
|
|
|
|
|
|
|
|
(1.10) |
|
[0; |
|
|
|
|
|
|
|
|
|
|||||||||
Обычно в ЦОС предпочтение |
|
|
|
отдается |
абсолютной |
частоте f и |
||||||||||||
|
|
ˆ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
нормированной круговой частоте . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Например, дискретная косинусоида в области нормированных частот имеет вид:
x(n)=Acos(2 fˆ n)=Acos( ˆ n)
Введение нормированной частоты указывает на то, что в ЦОС важны не абсолютные значения частот сигнала и дискретизации, а их соотношение. Покажем это на примере двух дискретных косинусоид:
x (n) cos(2 f T n) cos(2 |
|
|
f1 |
n) |
при f |
=2Гц, f |
Д1 |
=16Гц |
||||
|
|
|
|
|||||||||
1 |
1 1 |
|
f Д1 |
|
|
1 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||
x |
(n) cos(2 f T n) cos(2 |
|
f2 |
|
n) |
при f |
=5кГц, f |
|
=40кГц |
|||
|
|
|
|
|
||||||||
2 |
2 2 |
|
|
f Д 2 |
2 |
|
Д2 |
|
||||
|
|
|
|
|
|
|
|
|
||||
Подставив значения f и fД, получим в области нормированных частот одинаковые дискретные сигналы
8

x1 (n) cos(2 162 n) cos(4 )n;
x2 (n) cos(2 400005000 n) cos(4 )n;
т.к. они имеют равные значения нормированных частот.
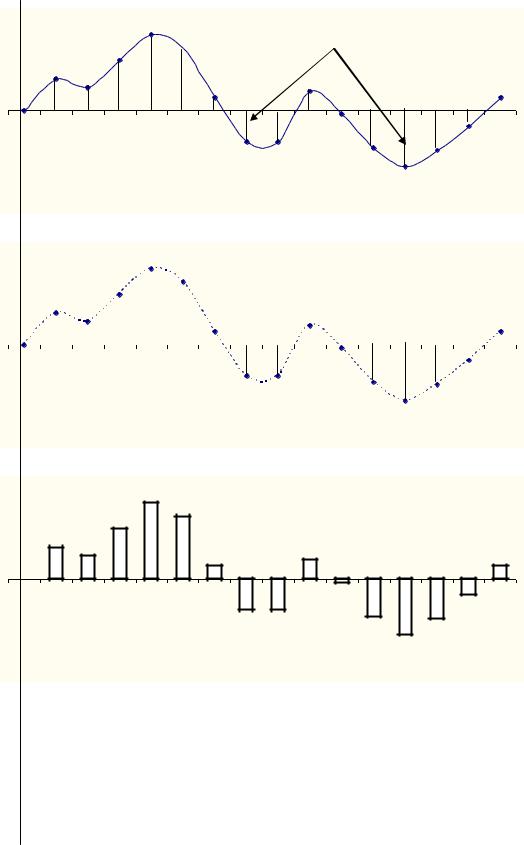
Пример.Изобразить график цифровой косинусоида с частотой ˆ = 8 .
Решение.
Из общего выражения для цифровой частоты:
ˆ = 2f / f Д 2fT Д
установим соотношение между периодом цифровой косинусоиды и интервалом дискретизации ТД
2Т Д / Т 8 , откуда
Т/ТД = 16
Таким образом, в одном периоде цифровой косинусоиды содержится 16 интервалов дискретизации (рис. 1.2)
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
рис. 1.2
2. Математический аппарат списания сигналов и линейных систем
9
Вэтом разделе рассматривается математическое описание аналоговых
идискретных сигналов и линейных сигналов и линейных систем в различных областях.
Во временной области сигналы (аналоговые и дискретные) описываются ФУНКЦИЯМИ ВРЕМЕНИ, например x(t) A(t)sin( t ) . Линейные системы (аналоговые и дискретные) описываются:
а) характеристиками. Характеристики линейной системы определяется как ее реакция на некоторый тестовый сигнал (например, импульсная характеристика — отклик системы на - функцию), т.е. характеристика — это сигнал, описываемый функцией времени;
б) соотношением вход/выход. Соотношение вход/выход. Соотношение вход/выход линейной системы описывается линейным уравнением, устанавливающим связь между входным и выходным сигналами – функциями времени. По умолчанию будем считать, что системы имеют один вход и один выход.
Помимо временной, сигналы и линейные системы могут описываться и в других областях (в области других независимых переменных). В данном разделе рассмотрим краткие сведения о математическом аппарате, традиционно используемом для преобразования функций времени при описании сигналов и линейных систем в следующих областях:
в области комплексной переменной (р-области для непрерывных сигналов x(t) и z-области для дискретных сигналов);
в частотной области.
2.1.Математическое описание аналоговых сигналов и линейных
систем в р-области и в частотной области
Математическое описание аналоговых сигналов и линейных систем в р-области (на комплексной р-плоскости) и в частотной области основано на преобразованиях Лапласа и Фурье, соответственно, функции времени, для которой выполняется условие
x(t) |
|
t 0 |
0 |
(2.1) |
|
2.1.1. Преобразование Лапласа
Преобразованием Лапласа функции x(t) вида (2.1) называется пара взаимно однозначных преобразований:
прямое преобразование
|
|
x( p) L x(t) x(t)e pt dt |
(2.2) |
0 |
|
10 |
|