

4.2. Логико-динамические модели
Динамику ХТС ПД можно представить в виде комбинированных логико-динамических моделей, которые удобно применять при разработке и проектировании автоматизированных систем управления технологическими процессами.
Логико-динамическая модель ХТС ПД имеет следующую структуру:
 ,
,
то есть состоит из логической и динамической частей.
В квадратных скобках содержится логическая часть модели, которая описывает условия изменения функциональных состояний системы. Логическая часть модели содержит включающий оператор Uj, а также дизъюнкцию членов, содержащих включающий оператор Ul и логическое условие Ql, определяющие состояние системы и внешние воздействия, при которых осуществляется переход от одного функционального состояния к другому. Логическая часть модели может содержать функции алгебры логики, суммирования, сравнения; предикаты и т.п.
Правая часть логико-динамической модели представляет динамическую часть. Она описывает реакцию объекта на команды, поступающие в начале операции, и на возмущающие воздействия zl. По виду и характеру эта часть модели напоминает динамические модели ХТС НД, но, в отличие от ХТС НД, работающих в стационарном режиме, ХТС ПД представляют собой существенно нестационарные объекты. Поэтому уравнения их динамики описывают значительные отклонения их состояний от начальных и конечных значений, в то время как для ХТС НД характерны незначительные отклонения от стационарных состояний, что позволяет принимать гипотезу о квазистационарности объектов и выполнять линеаризацию нелинейных операторов.
Динамическая часть логико-динамической модели обычно имеет вид обыкновенных дифференциальных уравнений с коэффициентами в виде функций времени. Изменение функционального состояния ХТС ПД приводит к изменению не только значений коэффициентов динамической части модели, но и ее структуры. Логико-динамические модели ХТС ПД можно представить в различной форме, например, в виде таблицы 4.
Табл.4. Структура логико-динамической модели АПД
|
№
|
Наименование операции |
Логичес-кое условие |
Команды |
Основ-ные возму-щения |
Реакция объекта |
|
1 |
Загрузка реагента |
Q1 |
U1 |
z1 |
x1(t) |
|
2 |
Технологический процесс |
Q2 |
U2 |
z2 |
x2(t) |
|
3 |
Выгрузка продукта |
Q3 |
U3 |
z3 |
x3(t) |
Логико-динамическая модель РПД содержит логические условия, истинность которых является признаком начала или окончания операции. Если условие истинно, то формируется управляющая команда, представляющая конъюнкцию отдельных управляющих воздействий; в логико-динамической модели содержится также информация о реакции объекта на управляющие воздействия.
Сформируем логико-динамическую модель ХТС ПД, изображенной на рис.27. Пусть технологический цикл РПД состоит из следующих операций:
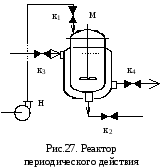
 в изо-термических условиях до заданной
степени превращения х реагента А; О5
—
выгрузка продукта реакции самотеком
через нижний штуцер.
в изо-термических условиях до заданной
степени превращения х реагента А; О5
—
выгрузка продукта реакции самотеком
через нижний штуцер.
Логико-динамическая модель имеет вид таблицы 5.
 Табл.5.
Логико-динамическая модель РПД
Табл.5.
Логико-динамическая модель РПД
|
№ |
Наименование операции |
Логическое условие |
Управ-ляющая команда |
Реакция объекта |
|
1 |
Начало загрузки реагента |
h00&U10&U20 &U30&U40 UH0&UM0 |
[U11 UH1] |
Формула ( ) |
|
2 |
Окончание загрузки реагента |
h* |
[UH0,U10] |
h=const |
|
3 |
Включение двигателя мешалки |
h* |
[UM1] |
Формула ( ) |
|
4 |
Начало нагревания |
UM1&h* |
[U31 U41] |
Формула ( ) |
|
5 |
Окончание нагревания |
T* |
[U30U40] |
Формула ( ) |
|
6 |
Начало химической реакции |
T* |
- |
Формула ( ) |
|
7 |
Окончание химической реакции |
x* |
- |
x=const
|
|
8 |
Начало выгрузки продукта |
x* |
[U21] |
Формула ( ) |
|
9 |
Окончание выгрузки продукта |
h=0 |
[U20] |
h=0
|
Управляющее воздействие в табл.5 обозначено символом Uji , где j - номер управляющего устройства, а i принимает два значения: 0 или 1, причем Uj1 означает “включить”, а Uj0 — “выключить”. Например, логическое условие начала загрузки реагента, имеющее вид:
h00&U10&U20&U30&U40UH0UM0
означает,
что реактор пустой (h00)
и все клапаны, изображенные на рис.38,
закрыты (Uj0,
 ),
двигатель мешалки выключен (UM0),
насос выключен (UH0).
В этом состоянии должна быть сформирована
управляющая команда [U11,
UH1],
означающая, что следует открыть клапан
k1
и включить насос. При таком воздействии
в реактор будет подаваться сырье, и
уровень жидкости h(t)
будет изменяться по закону
( ).
),
двигатель мешалки выключен (UM0),
насос выключен (UH0).
В этом состоянии должна быть сформирована
управляющая команда [U11,
UH1],
означающая, что следует открыть клапан
k1
и включить насос. При таком воздействии
в реактор будет подаваться сырье, и
уровень жидкости h(t)
будет изменяться по закону
( ).
Признаком окончания загрузки является достижение уровнем жидкости в реакторе заданного значения h(t)=h*. При этом следует выключить насос, тогда значение уровня в реакторе будет оставаться постоянным h(t)=const. В таком виде записывается логико-динамическая модель РПД, цикл которого в рассматриваемом примере состоит из девяти операций.