

Kandaurova_N_Vychislitelnye_sistemy_seti_i_telekommunikatsii
.pdfА.П. Пятибратова. – 3-е изд., перераб. и доп. – М.: Финансы и статистика,
2005.
9.Пятибратов А.П. и др. Вычислительные системы, сети и телекоммуникации: учебник / А.П. Пятибратов, Л.П. Гудыно, А.А. Кириченко; под ред. А.П. Пятибратова. – 2-е изд., перераб. и доп. – М.: Финансы и статистика, 2002.
Лекция № 6. УПРАВЛЕНИЕ ВНЕШНИМИ УСТРОЙСТВАМИ
6.1. Основные принципы управления
Копмпьютеры, помимо процессоров и основной памяти (образующих его ядро), содержат многочисленные периферийные устройства (ПУ): внешние ЗУ (ВЗУ) и устройства ввода-вывода (УВВ) [6, 10, 21, 23].
Передача информации с периферийного устройства в копмпьютер называется операцией ввода, а передача из копмпьютера в ПУ – операцией вывода.
Производительность и эффективность копмпьютера определяются не только возможностями еѐ процессора и характеристиками ОП, но и составом ПУ, их техническими данными и способами организации их со вместной работы с копмпьютером.
При разработке систем ввода-вывода копмпьютера особое внимание обращается на решение следующих проблем:
реализация копмпьютеров с переменной конфигурацией оборудования для лѐгкого изменения состава оборудования в соответствии с назначением;
параллельная работа процессора над программой и выполнение ПУ процедур ввода-вывода для эффективного использования оборудования;
упрощение и стандартизация программирования операций вводавывода для различных ПУ;
автоматическое распознавание и реакция ядра копмпьютера на
многообразие ситуаций, возникающих в ПУ (готовность устройств, отсутствие носителя, аварийные ситуации и др.).
Первый шаг в совершенствовании структуры копмпьютера с целью повышения производительности был сделан при разработке второго поколения ЭВМ, когда впервые была обеспечена автономность внешних устройств. Сначала она была необходима для согласования ско рости работы устройств копмпьютеров.
Однако автономность потребовала проведения проверок исправности устройств при каждом обращении к ним. Появилась определенная технология обращения к автономным внешним устройствам – интерфейс. Когда эту технологию унифицировали, появилось понятие стандартного интерфейса.
Стандартизация интерфейсов ввода-вывода привела к возможности гибко изменять конфигурацию копмпьютеров.
Затем появилась концепция виртуальных устройств, позволяющая совмещать различные типы копмпьютеров, операционные системы. Совместимость распространилась и на работу копмпьютеров разной конфигурации.
81
Изменилась и технология работы – при отсутствии печатающих устройств файлы направлялись в виртуальное устройство, где и накапливались, а реально распечатывались на другом копмпьютере.
Дальнейшее совершенствование интерфейсов потребовалось при решении специфических задач: новые внешние устройства (сканеры) позволяли вводить текст в графическом виде, а обрабатывать его надо было в символьном виде. Поэтому возникла необходимость в системах преобразования из графического формата в символьный.
Во внешние устройства стали встраивать свою основную память, объем которой должен обеспечивать вывод целой страницы, при плотности 600 точек/дюйм – этот объем превышает иногда объем основной памяти ЭВМ.
При создании автоматизированных рабочих мест появилась необходимость подключения к копмпьютерам аудиовизуальной аппаратуры – телекамер, видеомагнитофонов, фотокамер, аудиоустройств. На этой основе образовался специальный аппаратный комплекс, называемый анимационной линейкой. Из-за технической несовместимости необходимой для таких комплексов аппаратуры потребовались программные и аппаратные преобразователи сигналов, специальные средства сопряжения.
Все это и явилось основой для совершенствования систем, обеспечивающих связь ЭВМ с периферийными устройствами.
В общем случае для организации и проведения обмена данными между двумя устройствами требуются специальные средства:
специальные управляющие сигналы и их последовательности;
устройства сопряжения;
линии связи;
программы, реализующие обмен.
Весь этот комплекс линий и шин, сигналов, электронных схем, алгоритмов и программ, предназначенный для осуществления обмена информацией, называется интерфейсом.
В зависимости от типа соединяемых устройств различают:
внутренний интерфейс копмпьютера, предназначенный для сопряжения элементов внутри системного блока;
интерфейс ввода-вывода – для сопряжения различных внешних устройств с системным блоком;
интерфейсы межкопмпьютерного обмена – для сопряжения различных копмпьютеров при образовании вычислительных сетей;
интерфейсы «человек-машина» – для обмена информацией между
человеком и копмпьютером (пользовательский интерфейс).
Для каждого интерфейса характерно наличие специального аппаратного комплекса (рисунок 6.1). Характер использования этого аппаратного комплекса определяется технологией (протоколом) обмена.
Особое место занимает человеко-машинный интерфейс. Он обеспечивается техническими средствами, программами и технологией общения.
82
Устройство |
Передатчик |
|
Приѐмник |
Устройство |
|
|
|
|
|
|
|
Интерфейс |
||
Рисунок 6.1 – Место интерфейса в аппаратном комплексе
Если интерфейс обеспечивает обмен одновременно всеми разрядами передаваемой информационной единицы, он называется параллельным интерфейсом. Внутренний интерфейс копмпьютера всегда делается параллельным или последовательно-параллельным. Интерфейсы межкопмпьютерного обмена обычно последовательные, т.е. в них обмен информацией производится по одному биту, последовательно.
Для параллельного и последовательно-параллельного интерфейса необходимо, чтобы участники общения были связаны многожильным интерфейсным кабелем с количеством жил не меньше числа одновременно передаваемых бит. В последовательных интерфейсах участники общения связываются друг с другом одной (двухпроводной) линией связи или световодом, или коаксиальным кабелем, или радиоканалом.
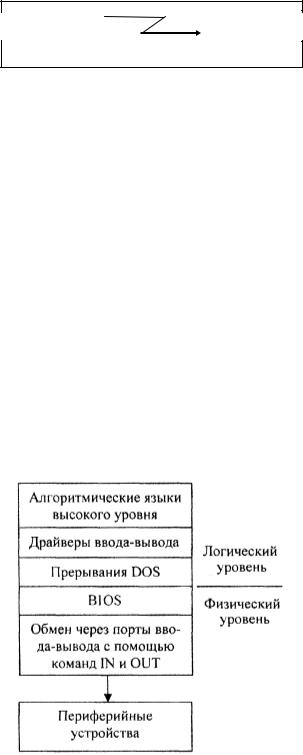
В зависимости от используемых при обмене программно -технических средств интерфейсы ввода-вывода делятся на два уровня: физический и логический (рисунок 6.2).
Рисунок 6.2 – Логический и физический уровни интерфейсов ввода-вывода
В зависимости от степени участия центрального процессора в об мене данными в интерфейсах может использоваться три способа управления обменом:
режим сканирования (асинхронный обмен);
синхронный обмен;
прямой доступ к памяти.
83

Для внутреннего интерфейса копмпьютера режим сканирования предусматривает опрос центральным процессором периферийного устройства (ПФУ): готово ли оно к обмену. Если нет, то продолжается опрос периферийного устройства (рисунок 6.3).
Операция пересылки данных не может эффективно загрузить высокоскоростную аппаратуру процессора. В результате этого в режиме сканирования снижается производительность копмпьютера.
Однако при пересылке блока данных процессору приходится для каждой единицы передаваемых данных (байт, слово) выполнять довольно много команд (буферизация данных, преобразование форматов, подсчет количества переданных данных, формирование адресов памяти и т.п.). В результате скорость передачи данных при пересылке блока данных даже через высокопроизводительный процессор может оказаться неприемлемой для систем управления, работающих в реальном масштабе времени.
Рисунок 6.3 – Алгоритм сканирования
Режим сканирования упрощает подготовку к обмену, но имеет ряд недостатков:
процессор постоянно задействован и не может выполнять другую работу;
при большом быстродействии периферийного устройства процес сор
не успевает организовать обмен данными.
В синхронном режиме центральный процессор выполняет основную роль по организации обмена, но в отличие от режима сканирования не ждет готовности устройства, а осуществляет другую работу. Когда в нем возникает нужда, внешнее устройство с помощью соответствующего прерывания обращает на себя внимание центрального процессора.
84
Для быстрого ввода-вывода блоков данных и разгрузки процессора от управления операциями ввода-вывода используют прямой доступ к памяти
(DMA – Direct Memory Access).
Прямым доступом к памяти называется способ обмена данными, обеспечивающий автономно от процессора установление связи и передачу данных между основной памятью и внешним устройством.
В режиме прямого доступа к памяти используется специализиро ванное устройство – контроллер прямого доступа к памяти, который перед началом обмена программируется с помощью центрального процессора. В него передаются адреса основной памяти и количество передаваемых данных. Затем центральный процессор от контроллера прямого доступа к памяти отключается, разрешив ему работать, и до окончания обмена может выполнять другую работу. Об окончании обмена контроллер прямого доступа к памяти сообщает процессору. В этом случае участие центрального процессора косвенное. Обмен ведет контроллер прямого доступа к памяти.
Прямой доступ к памяти (ПДП):
освобождает процессор от управления операциями ввода-вывода;
позволяет осуществлять параллельно во времени выполнение процессором программы и обмен данными между внешним устройством и основной памятью;
производит обмен данными со скоростью, ограниченной только пропускной способностью основной памяти и внешним устройством.
ПДП разгружает процессор от обслуживания операций ввода-вывода, способствует увеличению общей производительности копмпьютера, дает возможность копмпьютеру более приспособленно работать в системах реального времени.
6.2. Прямой доступ к памяти
При работе в режиме прямого доступа к памяти (ПДП) контроллер ПДП выполняет следующие функции [6, 10, 21, 23]:
принимает запрос на ПДП от внешнего устройства;
формирует запрос микропроцессору на захват шин системной магистрали;
принимает сигнал, подтверждающий вход микропроцессора в состояние захвата (перехода в z-состояние, при котором процессор отключается от системной магистрали);
формирует сигнал, сообщающий внешнему устройству о начале выполнения циклов ПДП;
выдает на шину адреса системной магистрали адрес ячейки ОП, предназначенной для обмена;
вырабатывает сигналы, обеспечивающие управление обменом данными;
по окончании ПДП либо организует повторение цикла ПДП, либо
85

прекращает режим ПДП, снимая запросы на него.
Циклы ПДП выполняются с последовательно расположенными ячейками памяти, поэтому контроллер ПДП имеет счетчик числа переданных байтов.
На рисунке 6.4 приведена схема взаимодействия устройств микропроцессорной системы в режиме ПДП.
Контроллеры ПДП (КПДП) в IBM PC совместимы снизу вверх, т.е. программы, написанные с использованием КПДП ранних моделей копмпьютеров, нормально работают и на более поздних моделях.
Рисунок 6.4 – Взаимодействие устройств в режиме ПДП
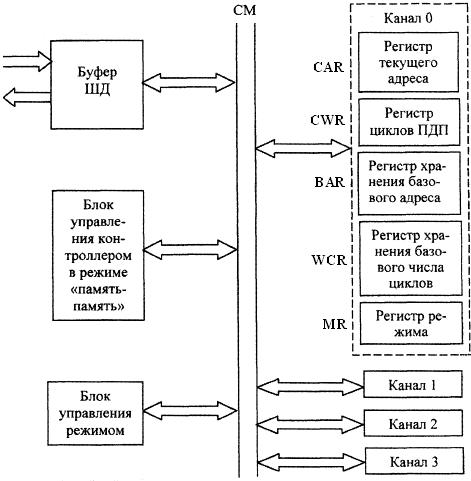
Каждый канал КПДП состоит из четырех 16-разрядных регистров (рисунок 6.5): регистр текущего адреса (CAR), регистр циклов ПДП (CWR), регистр хранения базового адреса (BAR), регистр хранения базового числа циклов ПДП (WCR) и 6-разрядного регистра режима (MR).
Регистр текущего адреса хранит текущий адрес ячейки памяти при выполнении цикла ПДП. После выполнения каждого цикла ПДП содержимое этого регистра увеличивается или уменьшается на единицу. Оно может быть прочитано или загружено с помощью двух команд IN или OUT соответственно, каждая из которых работает только с одним байтом. В режиме автоинициализации содержимое регистра текущего адреса при обновлении принимает базовый адрес из регистра хранения базового адреса.
Регистр циклов ПДП хранитчисло слов, предназначенных для передачи. При выполнении циклов регистр работает в режиме вычитающего счетчика. При переходе из нулевого состояния в FFFFh вырабатывается управляющий сигнал для блока управления контроллером. Регистр может быть прочитан двумя командами IN. В него можно осуществить запись двумя командами OUT из микропроцессора или в режиме инициализации – из регистра хранения базового числа циклов ПДП.
Регистры BAR и WCR предназначены для хранения констант – базового адреса и базового числа циклов. Они загружаются в режиме программирования КПДП одновременно с регистрами CAR и CWR. В процессе выполнения циклов ПДП их содержимое не изменяется. Прочитать состояние этих регистров невозможно.
86
Регистр режима определяет режим работы канала. Он содержит информацию о номере канала, типе цикла ПДП (чтение (ОП←ВУ), запись (ОП→ВУ), проверка), необходимости автоинициализации, режиме изменения регистра текущего адреса (CAR) – увеличение или уменьшение и режиме работы канала – передача по запросу, одиночная передача, блочная передача, каскадирование (работа в составе каскада КПДП).
Рисунок 6.5 – Структурная схема контроллера ПДП
Регистр команд блока управления режимом определяет основные параметры работы канала. Загружается при программировании КПДП микропроцессором.
Регистр условий хранит разрешение на ПДП каждому каналу (устанавливаемые программно) и запоминает факт перехода через 0 в регистре хранения базового числа циклов каждого канала.
Контроллер ПДП может работать в двух основных режимах: в режиме программирования и в режиме выполнения циклов ПДП.
В режиме программирования микропроцессор работает с КПДП, как с внешним устройством. После загрузки в КПДП управляющих слов контроллер переходит в пассивное состояние. В этом состоянии КПДП будет находиться до тех пор, пока не поступит запрос на ПДП от ВУ или от
87
микропроцессора. Обнаружив запрос на ПДП, контроллер выставляет микропроцессору запрос на захват системной магистрали и ожидает от него подтверждения захвата (т.е. отключения МП от СМ, перехода его выходов в состояние высокого сопротивления, z-состояния). При получении сигнала подтверждения захвата, контроллер начинает выполнять циклы ПДП.
Системная магистраль (СМ) в режиме прямого доступа к памяти используется мультиплексно КПДП и микропроцессором, причем основное управление системной магистралью выполняет КПДП, а МП получает к ней доступ на очень короткие промежутки времени для обмена информацией с основной памятью.
Несмотря на большую самостоятельность ПДП, ведущее положение в МП-системе остается все-таки за микропроцессором, который, запустив обмен информацией в режиме ПДП, продолжает выполнять свою работу.
6.3. Интерфейс системной шины
Системная шина (магистраль) является узким местом копмпьютера, так как все устройства, подключенные к нему, конкурируют за возможность передавать свои данные по ее шинам [6, 10, 21, 23].
Системная магистраль (СМ) – это среда передачи сигналов управления, адресов, данных, к которой параллельно и одновременно могут подключаться несколько компонентов вычислительной системы. Физически системная магистраль представляет собой параллельные проводники на материнской плате, которые называются линиями. Но это ещѐ и алгоритмы, по которым передаются сигналы, правила интерпретации сигналов, дисциплины обслуживания запросов, специальные микросхемы, обеспечивающие эту работу. Весь этот комплекс образует понятие интерфейс системной магистрали или стандарт обмена.
Первоначально системная магистраль имела довольно простую архитектуру, но в процессе появления новых стандартов обмена еѐ конструкция усложнялась. СМ стала делиться на системную и локальную, графическую и периферийную.
Исторически все интерфейсы СМ ведут свою родословную от стандарта IBM MULTIBUS, для которого фирмой был разработан комплект микросхем (chipset). Этот стандарт мог обслуживать передачу 8- и 16-битовых данных, работать в мультипроцессорном режиме с несколькими ведущими устройствами. Понятие ведущее/ведомое устройство могло динамически переопределяться с помощью сигналов управления (например, контроллер ПДП в режиме программирования – ведомое устройство, а в активном режиме – ведущее). Для этого стандарта характерно наличие следующих линий: 20 линий адресов, 16 линий данных, 50 управляющих и служебных линий.
Для IBM PS-2 в 1987 г. был разработан стандарт «Микроканал» – MCA (Micro Channel Architecture). В нем 24-разрядная шина адреса. Шина данных увеличена до 32 бит. Отказались от перемычек и переключателей,
88
определяющих конфигурацию технических средств, и ввели CMOS-память
(Complementary Metal Oxyde Semicondactor), позволяющую хранить эту информацию и при отключении питания. Все оборудование, подключаемое к системной магистрали, содержит специальные регистры POS (Programmable Option Select), позволяющие конфигурировать систему программным путем. При тактовой частоте 10 МГц скорость передачи данных составляла 20 Мбайт/с.
Для IBM PC XT был разработан стандарт ISA (Industry Standart Architecture), который имеет две модификации – для XT и AT. В ISA XT шина данных – 8 бит, шина адресов – 20 бит, шина управления – 8 линий. В ISA AT шина данных увеличена до 16 бит. Встречаются и 32-битовые ISA, но это – нестандартизованное расширение. Тактовая частота для работы СМ в стандарте ISA составляет 8 МГц. Производительность ISA XT – 4 Мбайта/с, ISA AT – от 8 до 16 Мбайт/с.
Стандарт EISA (Extended ISA) – это жестко стандартизованное расширение ISA до 32 бит. Конструктивно совместим с ISA-адаптерами внешних устройств. Предназначен для многозадачных систем, файл-серверов и систем, в которых требуется высокоэффективное расширение вводавывода. При тактовой частоте 8,33 МГц скорость передачи данных составляла 33 Мбайта/с.
Стандарт VESA (VESA Lokal Bas, или VLB) разработан Ассоциацией стандартов видеоданных (Video Electronics Standart Association) как расширение стандарта ISA для обмена видеоданными с адаптером SVGA. Обмен данными по этому стандарту ведется под управлением микросхем, расположенных на карте, устанавливаемой в специальный слот расширения VLB и соединяемой с СМ через стандартный слот расширения. В отличие от стандартных слотов расширения слот VLB связан с микропроцессором напрямую, минуя системную магистраль. Карта VLB, работая совместно с системной магистралью, реализующей стандарт ISA, обеспечивает 32разрядную передачу данных с тактовой частотой микропроцессора (но не более 40-50 МГц). В стандартные слоты материнской платы с интерфейсом VLB устанавливаются карты расширения с интерфейсом ISA. Производительность стандарта VLB достигает 132 Мбайт/с.
Стандарт PCI (Peripheral Component Interconnect) разработан фирмой
Intel для копмпьютеров с МП Pentium. Это не развитие предыдущих стандартов, а совершенно новая разработка. Системная магистраль в соответствии с этим стандартом работает синхронно с тактом МП и осуществляет связь между локальной шиной МП и интерфейсами ISA, EISA или MCA. Но поскольку для этого интерфейса используются микросхемы, выпускаемые другими фирмами (Saturn – для 486, Mercury, Neptune, Triton – для Pentium), скорость работы СМ реально составляет 30—40 Мбайт/с при теоретически возможной 132/264 Мбайта/с. Стандарт PCI разрабатывался как процессорно-независимый интерфейс. Помимо Pentium с этим интерфейсом могут работать и МП других фирм (Alpha корпорации DEC, MIPS R4400 и Power PC фирм Motorola, Apple и IBM). Стандарт PCI позволяет реализовать
89