

Министерство образования и науки Российской Федерации
Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования
«Алтайский государственный технический университет
им. И.И. Ползунова»
Факультет _____информационных технологий____
Кафедра _системы автоматизированного проектирования_
Отчет защищен с оценкой________
Преподаватель _________________
“____”___________ 201_ г.
Отчет
по лабораторной работе № 1
по дисциплине «ОТУ»
Студент группы САПР-81 Агапов А.М.
Преподаватель Гребеньков А.А.
БАРНАУЛ 2012
Судя по методичке, номера задач для данной лабораторной работы следующие:
2, 9, 51, 345.
Передаточной функцией линейной стационарной системы называется отношение изображения выходного сигнала к отношению изображения входного сигнала. Такая функция существует только у непрерывно дифференцируемых функций.
Задача 2. Найти передаточную функцию гидравлического исполнительного устройства, изображенного на рисунке(2 а) ниже:
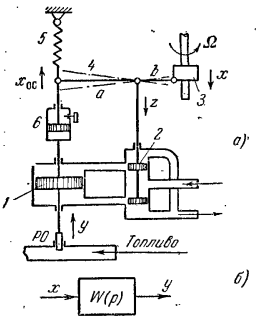
Рисунок 1 – Гидравлическое исполнительное устройство
Применяется совместно с центробежными измерителями угловой скорости ЦИС для регулирования скорости вращения тепловых двигателей.
Входная величина – перемещение х муфты ЦИС 3. Выходная величина – перемещение y заслонки или регулирующего органа(РО) теплового двигателя(рис 1 б).
Решение.
Гидравлический двигатель(золотник 2 с силовым поршнем 1) вместе с изодромом(пружина 5 с демпфером 6) могут находиться в покое только при одном положении рычага 4, когда пружина находится в ненапряженном состоянии и золотник в среднем положении. При этом муфта 3 ЦИС занимает положение, соответствующее заданной угловой скорости Ω. При отклонении Ω от заданной муфта 3 сдвинется, сместит золотник 2 и вся система придет в движение, до тех пор, пока скорость Ω вновь не станет заданной.
Часть 1. Уравнение гидравлического двигателя.
Усилия, развиваемые силовым поршнем, значительно превосходят силы сопротивления и инерционные силы, поэтому их влиянием можно пренебречь. Тогда, если не учитывать сжимаемость жидкости и считать, что площадь окна, открываемого золотником, пропорциональна его перемещению z, то уравнение гидродвигателя будет:
![]()
где
![]() -коэффициент передачи.
-коэффициент передачи.
Часть 2.Уравнение рычага, связанного с муфтой изодромом и золотником.
Перемещение
муфты х вызывает перемещение золотника
z
и силового поршня, который перемещает
поршень демпфера
![]() в сторону, обратную перемещению муфты.
Следовательно, имеем уравнение
в сторону, обратную перемещению муфты.
Следовательно, имеем уравнение
![]() ,
,
где
![]() - коэффициенты передачи, а, b
– длины плеч рычага.
- коэффициенты передачи, а, b
– длины плеч рычага.
Часть 3. Уравнение цепи обратной связи.
В цепь обратной связи входит демпфер, пружина и рычаг 4. Составим уравнение равновесия сил
![]() ,
,
где
![]() - сила демпфера, пропорциональная
скорости перемещения поршня демпфера
- сила демпфера, пропорциональная
скорости перемещения поршня демпфера
![]() ;
;
![]() -сила пружины;
-сила пружины;
![]() -сила, развиваемая силовым поршнем;
-сила, развиваемая силовым поршнем;
![]() -
постоянные коэффициенты.
-
постоянные коэффициенты.
![]() ,
,
где
![]() - постоянная времени цепи обратной
связи,
- постоянная времени цепи обратной
связи,
![]() -коэффициент передачи.
-коэффициент передачи.
![]()
Тогда
![]() ,
,
где
![]() .
.
Тогда передаточная функция будет следующей:
![]() .
.
Задача 9.
Найти передаточную функцию гидравлического демпфера, приведенного на рисунке ниже:
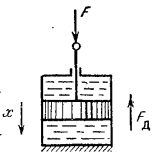
Рисунок 2 –Гидравлический демпфер
Входная величина – сила F. Выходная величина – перемещение поршня х.
Сначала произведем расчет без учета массы подвижных частей:
Приложенной
силе F
будет противостоять демпфирующая сила
![]() - коэффициент демпфирования, пропорциональный
вязкости жидкости и площади поршня и
обратно пропорциональный площади
пропускного отверстия.
- коэффициент демпфирования, пропорциональный
вязкости жидкости и площади поршня и
обратно пропорциональный площади
пропускного отверстия.
Тогда
![]() ,
где
,
где
![]() .
.
Теперь
![]() .
.
А сейчас рассмотрим случай, учитывающий массу подвижных частей:
![]()
где m – масса подвижных частей
Задача 51. Построить амплитудно-фазовую характеристику цепи RC, приведенной на рисунке ниже:
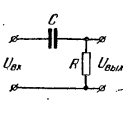
Рисунок 3 –цепь RC
R=1ком, С=10мкф.
Решение.
Частотная передаточная функция цепи равна
![]() ,
,
где
![]()
Преобразуем данное выражение таким образом, чтобы оно представляло собой комплексное число в алгебраической форме:
![]()
![]() .
.
Задаваясь
отдельными значениями ω можно вычислить
некоторые пары
![]() и построить по ним амплитудно-фазовую
характеристику цепи.
и построить по ним амплитудно-фазовую
характеристику цепи.
Но, проанализировав полученную передаточную функцию, можно понять, что эта характеристика задается уравнением
![]()
и
для положительных частот является
полуокружностью, расположенной в верхней
полуплоскости с центром в точке
![]() .
.
Требуемая АФХ приведена на рисунке ниже:
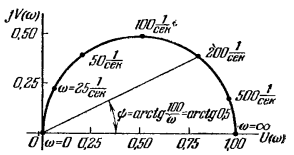
Рисунок 4 – АФХ
Частоты, соответствующие промежуточным точкам кривой могут быть найдены следующим образом:
аргумент комплексного числа равен:
![]() .
.
Поэтому
луч, проведенный из начала координат
под углом
![]() к оси абсцисс, пересекает амплитудно-фазовую
характеристику в точке, в которой
величина
к оси абсцисс, пересекает амплитудно-фазовую
характеристику в точке, в которой
величина
![]() определяется через
определяется через
![]() .
Один такой луч приведен на рисунке 4.
.
Один такой луч приведен на рисунке 4.
Задача 342.
Структурная схема системы автоматического управления гидротурбиной приведена на рисунке ниже:

Рисунок 5 – система АУГ
![]()
-соответственно относительные величины момента нагрузки турбины, момента развиваемого турбиной, угловой скорости вращения турбины и перемещения регулирующего органа. Передаточная функция трубопровода, полученная с учетом волновых явлений равна:
![]()

Решение.
Передаточная функция разомкнутой системы равна
![]()
Характеристическое уравнение замкнутой системы записывается в виде
![]()
После замены
![]()
и некоторых преобразований характеристическое уравнение будет иметь вид
![]()
![]()
Эквивалентная передаточная функция разомкнутой системы
![]()
![]()
![]()
Частота среза, соответствующая модулю, равному единице, равна
![]()
При
![]() фазовый сдвиг по частоте
фазовый сдвиг по частоте
![]() должен
равняться
должен
равняться
![]() ,
поэтому
,
поэтому
![]()
Тогда
![]()
Для последующих лабораторных работ необходимо выбрать систему, в которой все это будет рассчитываться. Был выбран популярный пакет Matlab и приложение к нему Simulink. Обзор их возможностей приведен ниже:
Matlab - это высокопроизводительный язык для технических расчетов. Он включает в себя вычисления, визуализацию и программирование в удобной среде, где задачи и решения выражаются в форме, близкой к математической. Типичное использование MATLAB - это:
-
математические вычисления
-
создание алгоритмов
-
моделирование
-
анализ данных, исследования и визуализация
-
научная и инженерная графика
-
разработка приложений, включая создание графического интерфейса
Программа Simulink является приложением к пакету MATLAB. При моделировании с использованием Simulink реализуется принцип визуального программирования, в соответствии с которым, пользователь на экране из библиотеки стандартных блоков создает модель устройства и осуществляет расчеты. При этом, в отличие от классических способов моделирования, пользователю не нужно досконально изучать язык программирования и численные методы математики, а достаточно общих знаний, требующихся при работе на компьютере и, естественно, знаний той предметной области, в которой он работает.
Simulink является достаточно самостоятельным инструментом MATLAB и при работе с ним совсем не требуется знать сам MATLAB и остальные его приложения. С другой стороны доступ к функциям MATLAB и другим его инструментам остается открытым и их можно использовать в Simulink. Часть входящих в состав пакетов имеет инструменты, встраиваемые в Simulink (например, LTI-Viewer приложения Control System Toolbox – пакета для разработки систем управления). Имеются также дополнительные библиотеки блоков для разных областей применения (например, Power System Blockset – моделирование электротехнических устройств, Digital Signal Processing Blockset – набор блоков для разработки цифровых устройств и т.д).
При работе с Simulink пользователь имеет возможность модернизировать библиотечные блоки, создавать свои собственные, а также составлять новые библиотеки блоков.
При моделировании пользователь может выбирать метод решения дифференциальных уравнений, а также способ изменения модельного времени (с фиксированным или переменным шагом). В ходе моделирования имеется возможность следить за процессами, происходящими в системе. Для этого используются специальные устройства наблюдения, входящие в состав библиотеки Simulink. Результаты моделирования могут быть представлены в виде графиков или таблиц.
Для запуска программы необходимо предварительно запустить пакет MATLAB. Основное окно пакета MATLAB показано на рисунке. Там же показана подсказка, появляющаяся в окне при наведении указателя мыши на ярлык Simulink в панели инструментов. Нажатие на ярлык Simulink в панели инструментов приводит к открытию окна обозревателя разделов библиотеки Simulink. Чтобы создать свою программу необходимо создать новый файл модели, расположить блоки в окне модели. Для этого необходимо открыть соответствующий раздел библиотеки. Далее, указав курсором на требуемый блок и нажав на левую клавишу “мыши” - “перетащить” блок в созданное окно.
Далее, если это требуется, нужно изменить параметры блока, установленные программой “по умолчанию”. Для этого необходимо дважды щелкнуть левой клавишей “мыши”, указав курсором на изображение блока. Откроется окно редактирования параметров данного блока. При задании численных параметров следует иметь в виду, что в качестве десятичного разделителя должна использоваться точка, а не запятая. После внесения изменений нужно закрыть окно кнопкой OK.
После установки на схеме всех блоков из требуемых библиотек нужно выполнить соединение элементов схемы. Для соединения блоков необходимо указать курсором на “выход” блока, а затем, нажать и, не отпуская левую клавишу “мыши”, провести линию к входу другого блока. После чего отпустить клавишу. В случае правильного соединения изображение стрелки на входе блока изменяет цвет. Для создания точки разветвления в соединительной линии нужно подвести курсор к предполагаемому узлу и, нажав правую клавишу “мыши”, протянуть линию. Для удаления линии требуется выбрать линию (так же, как это выполняется для блока), а затем нажать клавишу Delete на клавиатуре.
|
|
|
|
|
|
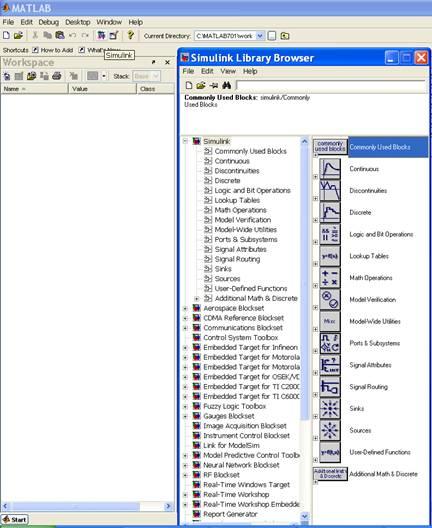
Окно обозревателя библиотеки блоков содержит следующие элементы:
-
Заголовок, с названием окна – Simulink Library Browser.
-
Меню, с командами File, Edit, View, Help.
-
Панель инструментов, с ярлыками наиболее часто используемых команд.
-
Окно комментария для вывода поясняющего сообщения о выбранном блоке.
-
Список разделов библиотеки, реализованный в виде дерева.
-
Окно содержимого раздела библиотеки (список вложенных разделов библиотеки или блоков)
-
Строка состояния, содержащая подсказку по выполняемому действию.
Библиотека Simulink содержит следующие основные разделы:
-
Continuous – библиотека непрерывных элементов (интегратор, дифференциатор, линейная система ОДУ и т.д.);
-
Discrete – библиотека дискретных элементов (интегратор с дискретным временем, дискретный фильтр и т.д.);
-
Functions & Tables – функции и таблицы (вызов функций Matlab, S-функции, блок, отображающий входной вектор в выходной (с использованием линейной интерполяции значений, определенных в параметрах блока) и т.д.);
-
Math – математические функции (абсолютное значение, комбинаторная логика, выделение вещественной и мнимой составляющей комплексного числа и т.д.);
-
Nonlinear – нелинейные элементы (релейное звено, переключатель и т.д. );
-
Signals & Systems – сигналы и системы (составной блок, входной сигнал, выходной сигнал, мультиплексер, демультиплексер и т.д.);
-
Sinks – средства отображения (временная диаграмма, вывод результатов в файл, остановка выполнения модели и т.д.);
-
Sources – источники сигналов (генератор импульсных/синусоидальных сигналов, генератор случайных чисел, генератор пилообразных сигналов, часы и т.д.).
-
Subsystems – блоки подсистем.
Список разделов библиотеки Simulink представлен в виде дерева, и правила работы с ним являются общими для списков такого вида: