

Zagryadtskiy_elektr_mashiny_2
.pdfПредположим, что ток в катушке А изменяется по закону |
|
i1 = I m sin (ω t), |
(1.1) |
в катушке В |
|
i 2 = I m sin (ω t -2π 3), |
(1.2) |
в катушке С |
|
i3 = I m sin(ω t-4π/ 3) ). |
(1.3) |
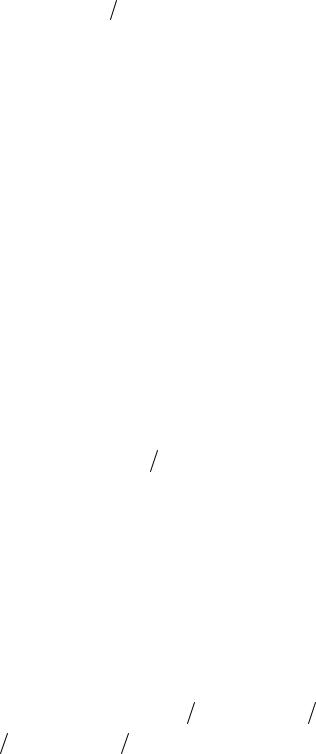
Рис. 1.2. Кривые изменения токов i1,i2,i3 в катушках А, В, С
Токи i1, i2, i3 создают магнитные поля с индукцией B1, B 2 , B3 ,
где |
|
|
B1 = B m sin (ω t) , |
(1.4) |
|
B 2 = B m sin (ω t -2π 3), |
(1.5) |
|
B3 = B m sin (ω t -4π 3), |
(1.6) |
|
где ω = 2π f , |
|
|
f – частота тока. |
|
|
Результирующая индукция |
равна сумме мгновенных значений |
|
индукций отдельных катушек. |
Высшими временными гармониками |
|
магнитной индукции пренебрегаем.
Условно обозначим, что положительное направление тока относительно начала катушек А, В, и С имеет знак плюс «+» (ток «втекает»), а отрицательное – со знаком точка «·» (ток «вытекает»).
Пусть на рис. 1.2 угол ω t = 0, ему соответствует точка а. Тогда, согласно принятого правила, ток i1 в катушке А будет отсутство-
вать, а токи i 2 и i3 будут иметь знаки, приведенные на рис. 1.1, а.
Результирующий вектор магнитной индукции В, направление которого определено по правилу буравчика, направлен вниз.
10

Положим ω t = π 2, точка
2, точка
начала катушки имеет знак «+», значение, а токи i 2 и i3 имеют
б. В этом случае ток i1 относительно
по величине он имеет максимальное знак «·» Из рисунка следует, что век-
тор магнитной индукции В направлен влево и совпадает с осью катушки А, ток в которой максимален. Продолжая рассуждать подобным образом, мы получим последовательность положений магнитно-
го поля с индукцией |
|
В |
, |
как показано на остальных частях |
рис. 1.1, в – д. |
|
|
|
|
Если точек на рис. |
1.2 |
брать достаточно много и близко друг |
||
к другу, то процесс перемещения вектора В будет происходить непрерывно и плавно, и мы получим «вращающееся» магнитное поле.
Особенностью вращающегося магнитного поля является то, что модуль вектора В остается постоянным (см. далее, п. 1.6.), а угол ө
между вектором В и осью kl катушки |
А изменяется во времени, |
θ = ωt , т.е. является переменным. |
|
Легко видеть, что за один период тока |
вектор магнитной индук- |
− |
|
ции В сделает один оборот, а за f периодов в секунду, или |
60 f |
в минуту, вектор магнитной индукции сделает n оборотов, т.е. |
|
n = 60 f . |
(1.7) |
Такая частота вращения получила название синхронной частоты вращения. Она не зависит от величины напряжения и тока.
Вращающееся магнитное поле характеризуется важной величиной – числом полюсов 2p, где р – число пар полюсов.
На рис. 1.1, а магнитные силовые линии выходят из верхней части рисунка, создавая северный полюс, и входят в нижнюю часть рисунка, образуя южный полюс. Нейтральная линия kl служит линией раздела полюсов. В этом случае можно сказать, что на рисунке представлена двухполюсная машина или машина с числом пар полюсов р = 1. Одному полюсу на окружности с диаметром D соответствует длина части окружности τ, называемая полюсным делением. Оно равно
τ = πD/2p. |
(1.8) |
Магнитные полюсы могут быть только парными, поэтому число полюсов является всегда четным.
11
Конструкции обмоток (см. п. 1.5.1.) позволяют получить не только двухполюсные электрические машины, но и машины с числом полюсов 2р = 4,6,8,…В этом случае за один период переменного тока магнитное поле поворачивается на двойное полюсное деление
2τ,
а полный оборот поля происходит за р периодов. Следовательно, частота вращения в мин−1 будет
n1 = 60 f p. |
(1.9) |
Использование вращающего магнитного поля положено в основу принципа работы асинхронного двигателя.
Как следует из изложенного выше, вращающееся магнитное поле изменяется не только во времени, но и в пространстве, вдоль внутренней поверхности ферромагнитного сердечника. При условии пренебрежения высшими пространственными гармониками магнитная индукция в первой катушке изменяется по закону
B А = B1 cos α, |
(1.10) |
где α – пространственный угол, отсчитываемый от оси катушки А. Магнитная индукция в катушке В в пространстве будет
B В = B2 cos( α -2π/ 3) . |
(1.11) |
В катушке С
BС = B3 cos (α -4π 3). |
(1.12) |
Результирующая величина магнитного поля, зависящая от времени t и угловой координаты α, запишется
В(α,t ) =B А + B В+ BС .
Подставляя в это равенство выражения (1.10), (1.11), (1.12), получим
B(α,t )= Bm sin (ω t).cos α + Bm sin (ω t -2π 3)·cos (α -2π 3) + |
(1.13) |
||
+Bm sin (ω t -4π 3)·cos (α -4π |
3) = 3/2 Bm sin (ω t – α). |
||
|
|||
12 |
|
|
|
Выражение (1.13) представляет собой математическое описание вращающегося по часовой стрелке магнитного поля. Если положить, например, B А = В1 cos( α -2π 3), а B В = B 2 cos α, то вращение маг-
3), а B В = B 2 cos α, то вращение маг-
нитного поля будет в противоположную сторону – против часовой стрелки, и в этом случае будет справедливым уравнение
B(α,t ) = 3/2 Bm sin (ω t + α). |
(1.14) |
Более подробно речь о вращающемся магнитном поле пойдет в п. 1.6.
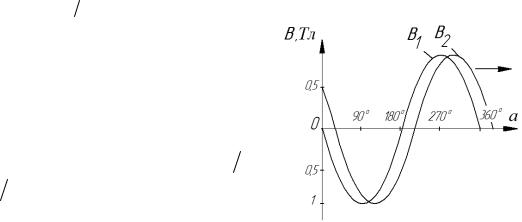
Пример 1. Представить кривые распределения магнитной индукции вдоль внутренней поверхности ферромагнитного сердечника
при Bm =2/3 Тл |
|
|
|
при ω t = 0º |
и ω t =π 6 . |
|
|
Решение: |
|
|
|
В первом случае |
|
|
|
B1 = 3/2 Bm sin (ω t – α) = 3/2·2/3 sin (0 – |
|
||
α) = sin α. |
|
|
|
Во втором случае |
|
|
|
B 2 =3/2 Bm sin (ω t – α) = 3/2·2/3 sin (π 6– |
|
||
– α) = sin (π 6 – α). |
|
|
|
Задаваясь величинами угла α = |
|
||
=0º…360º, |
получим в |
первом случае |
Рис. 1.3. Кривые распределения |
кривую B1, |
а во втором |
– кривую B 2 |
магнитной индукции B1, B2 |
(рис. 1.3). Из рисунка следует, что волна |
вдоль внутренней поверхности |
||
индукции сдвигается вправо (вращается |
ферромагнитного сердечника |
||
по часовой стрелке).
1.1.2.Магнитное поле, создаваемое двухфазной системой токов
Вращающееся магнитное поле может быть создано не только тремя, но и двумя катушками. Для его получения необходимо выполнить три условия:
-равенство токов в катушках,
-сдвиг катушек в пространстве на угол π/2,
-сдвиг токов во времени в катушках на угол π/2.
13
Пусть магнитная индукция в катушке А |
во времени и простран- |
стве изменяется согласно (1.4) и (1.10) , |
т.е. представляет собой |
пульсирующую во времени и распределенную в пространстве индукцию
ВА= Bm sin (ω t) · cos α, |
(1.14') |
а в катушке В |
|
ВВ =B m sin (ω t - π/2) · cos (α - π/2). |
(1.15) |
Результирующая величина индукции магнитного поля, с учетом действия двух катушек
B(α,t )= Bm sin (ω t – α). |
(1.16) |
Выражение (1.16) представляет собой уравнение кругового вращающегося магнитного поля.
Вращающееся магнитное поле, полученное с помощью двух переменных токов и двух катушек, ничем не отличается (за исключением амплитуды магнитной индукции) от вращающегося магнитного поля, созданного тремя токами в трех катушках. Если имеются отклонения хотя бы от одного из вышеприведенных условий, то круговое вращающееся поле превращается в эллиптическое поле. При этом конец вектора результирующего поля описывает не окружность, а эллипс. В этом случае результирующий вектор магнитной индукции изменяется по величине.
Чтобы изменить направление вращения магнитного поля, нужно изменить направление тока в одной из катушек (только в одной).
Магнитное поле, создаваемое тремя катушками, положено в основу работы трехфазного асинхронного двигателя, а поле, создаваемое двумя катушками – в основу работы двухфазного и однофазного асинхронных двигателей.
Вопросы для самоконтроля
1.Какие условия должны быть выполнены для получения вращающегося магнитного поля, создаваемого трехфазной обмоткой? Двухфазной обмоткой?
2.С какой частотой вращения магнитное поле вращается относительно неподвижного сердечника?
3. Наблюдается ли совпадение вектора магнитной индукции
сосью катушки (фазы), в которой ток максимален?
4.Объясните термин «синхронная частота вращения».
14
5.Что за величина «число полюсов» вращающегося магнитного
поля?
6.Зависит ли частота вращения магнитного поля статора асинхронной машины от электрической частоты приложенного к обмотке напряжения? От амплитуды напряжения?
7.Что такое «полюсное» деление»? Как определить его величину?
8.Как изменить направление вращения магнитного поля?
1.2.Основные понятия и термины в асинхронных машинах
Номинальным режимом работы электрической машины называется режим работы, для которого машина предназначена предприяти- ем-изготовителем.
Номинальными данными электрической машины называются данные, указанные на паспортной табличке (заводском щитке). Они характеризуют номинальный режим работы: мощность, напряжение, ток и род тока, частоту, число фаз, схему соединения обмоток, коэффициент мощности, коэффициент полезного действия; для двигателя с фазным ротором – напряжение между контактными кольцами при разомкнутой цепи и ток ротора в номинальном режиме, а также другие данные.
Номинальные данные фиксируют условия работы двигателя, установленного на высоте до 1000 м над уровнем моря при температуре окружающей среды 40 ºС, за исключением двигателей, для которых установлена другая температура окружающей среды.
Работа двигателя может характеризоваться режимами холостого хода и нагрузки.
Холостой ход – состояние машины, вращающейся при нулевой отдаваемой мощности, но при всех других номинальных условиях работы.
Нагрузкой электрической машины называется мощность, которую развивает электрическая машина в данный момент времени. Нагрузка выражается в ваттах, киловаттах или мегаваттах, а также в процентах или долях номинальной мощности. Она может быть задана током, потребляемым электрической машиной в данный момент времени и выражена в амперах, в процентах или долях номинального тока.
15
Асинхронный электродвигатель с короткозамкнутым ротором – бесколлекторный электродвигатель переменного тока, в котором один из элементов – статор или ротор присоединяются к сети, в то время как другой работает на принципе индукции.
Асинхронный электродвигатель с фазным ротором – двигатель, обмотка статора которого присоединяется к питающей сети, а обмотка ротора – к контактным кольцам.
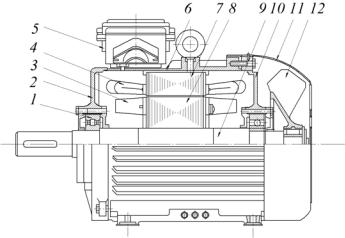
1.3. Устройство асинхронного двигателя
|
Устройство |
трехфазного |
|||
|
двигателя с короткозамкнутым |
||||
|
ротором приведено на рис. 1.4. |
||||
|
Оболочка двигателя |
состоит |
|||
|
из станины 6 и подшип- |
||||
|
никовых щитов 2 и 10. Она |
||||
|
предназначена для защиты ак- |
||||
|
тивных |
частей |
машины от |
||
|
окружающей среды. |
Станина |
|||
|
является основной формообра- |
||||
|
зующей |
деталью |
двигателя. |
||
Рис. 1.4. Устройство двигателя |
В ней размещается магнитный |
||||
сердечник 7 с обмоткой 4. |
|||||
с короткозамкнутым ротором |
|||||
|
К |
станине с |
помощью |
||
|
болтов |
крепятся |
подшипни- |
||
ковые щиты, передний и задний, в которых размещаются подшипниковые узлы. Подшипниковый узел 1 содержит подшипник, подшипниковые крышки, закрывающие подшипник с одной или с двух сторон, элементы уплотнения.
Оболочка совместно с магнитным сердечником, обмоткой, щитами представляет собою неподвижную часть электрической машины и называется статором. Снаружи к оболочке крепится клеммная коробка 5 и кожух вентилятора 11. Кроме них, на поверхности оболочки располагаются элементы (лапы, фланцы и др.), при помощи которых двигатель крепится к фундаменту или к исполнительному механизму.
Ротор – это вращающаяся часть двигателя. Он включает в себя магнитный сердечник 8, обмотку с короткозамкнутыми кольцами и вентиляционными лопатками 3, вал 9, подшипники со смазкой, вентилятор 12.
16
Ротор от статора отделяется воздушным зазором. Величина воздушного зазора у двигателей небольшой мощности 0,25…0,5 мм, у двигателей большой мощности – 1…2 мм.
Магнитные сердечники статора и ротора служат для проведения магнитного потока двигателя. Они выполняются в виде цилиндров из электротехнической стали, которые набираются из отдельных штампованных кольцеобразных пластин с пазами (выточками). Пластины имеют толщину 0,35…0,5 мм, и они электрически изолируются друг от друга. На статоре пазы расположены на внутренней поверхности сердечника, на роторе – на наружной поверхности. В пазах статора и ротора помещаются обмотки.
Первичная обмотка (обмотка статора) подключена к питающей сети и служит для создания магнитного потока в двигателе. Она состоит из отдельных распределенных в пространстве катушек, соединенных в фазу последовательно, параллельно, последовательно – параллельно. Фазы соединяются между собой в звезду или треугольник.
Вторичная обмотка (обмотка ротора) не подключена к питающей сети, что является главным достоинством двигателя. Она служит для создания тока ротора. Обмотка выполняется в виде токопроводящих стержней, уложенных в пазы ротора. На торцах ротора стержни присоединены к токопроводящим кольцам или дискам, образуя так называемую короткозамкнутую обмотку ротора.
Вал двигателя предназначен для механического соединения машины непосредственно или через передаточное устройство с исполнительным механизмом. Вал является
опорным элементом для магнитного |
|
|
||||
сердечника ротора. На обоих концах |
|
|
||||
вала |
устанавливаются подшипники. |
|
|
|||
Подшипники |
в |
свою |
очередь |
|
|
|
базируются в подшипниковых щитах. |
а |
б |
||||
Для |
охлаждения |
двигателя |
служит |
|||
вентилятор, который размещается на |
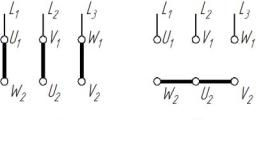
Рис. 1.5. Соединение фаз |
|||||
конце вала, противоположному концу |
|
в «треугольник» (∆) |
||||
вала, соединяемого с исполнительным |
|
и «звезда» (Y) |
||||
механизмом.
Клеммная коробка предназначена для подключения к двигателю питающего кабеля или проводов. Внутри корпуса коробки выведены 6 шпилек, соединенных с концами фаз.
Начала фаз, согласно международной классификации, обозначены буквами U1,V1,W1, а концы соответствующих фаз – буквами U 2 ,V2 ,W2. Соединение фаз в «треугольник» (∆) и «звезду» (Y) приведены на рис. 1.5.
17

В настоящем учебнике принято начала фаз обмотки обозначать через буквы А,В,С, а концы фаз соответственно через Х,У,Z.
Асинхронный двигатель с фазным ротором (рис. 1.6), отличается от двигателя с короткозамкнутым ротором тем, что на роторе уложена трехфазная обмотка, аналогичная обмотке статора. Фазы обмотки
|
ротора |
|
|
соединены |
||
|
в звезду, а ее выводы |
|||||
|
присоединены |
к |
трем, |
|||
|
изолированным друг от |
|||||
|
друга |
и |
|
от |
вала |
|
|
контактным |
|
|
(токо- |
||
|
съемным) |
|
|
кольцам. |
||
|
Токосъемные |
|
|
кольца |
||
|
служат |
для |
|
создания |
||
|
контакта между враща- |
|||||
|
ющимися |
проводника- |
||||
Рис. 1.6. Устройство двигателя с фазным ротором: |
ми ротора |
|
и |
|
непод- |
|
1 - коробка выводов; 2 – вал; 3 – подшипник; |
вижным |
проводником |
||||
4,11 – диффузор; 5 - обмотка статора; |
(проводом) |
с помощью |
||||
6,11 - подшипниковый щит; 7 - сердечник статора; |
щеток, закрепленных в |
|||||
8 - сердечник ротора; 9 - радиальный вентиляционный канал; |
||||||
12 - щеточная траверза; 13 – кожух; 14 - контактные кольца; |
неподвижных |
устрой- |
||||
|
ствах |
(щеткодержа- |
||||
телях), установленных на щите машины. К щеткам может быть подключен пусковой реостат. При этом пусковой реостат может содержать в каждой фазе резисторы с одинаковым или различным значением сопротивления. В ряде случаев пусковой реостат играет роль и регулировочного реостата для изменения числа оборотов двигателя.
После пуска происходит полное закорачивание обмотки ротора.
На рис. 1.7 приведены условные обозначения асинхронного двигателя, принятые в технической литературе.
аб
Рис. 1.7. Условные обозначения двигателя: а) с короткозамкнутым ротором;
б) с фазным ротором
1.4.Принцип действия асинхронной машины. Режимы работы
Достоинством асинхронной машины является то, что она может работать не только двигателем и генератором, но и в других различных режимах.
18

Двигатель. В основу принципа действия асинхронного двигателя, как и трансформатора, положен закон электромагнитной индукции.
Пусть на статоре (рис. 1.8), уложена трехфазная обмотка А, В, С, к которой подведено трехфазное напряжение сети с частотой ƒ1 . По
обмотке будет протекать трехфазный ток, направление которого, например, совпадает с направлением токов на рис. 1.1, а. Он создает вращающееся магнитное поле с частотой вращения n1 .
Уложим на ротор короткозамкнутую обмотку. В стержнях обмотки ротора вращающимся магнитным полем индуктируется ЭДС e 2 , направление которой
можно определить по правилу правой руки. Под действием этой ЭДС в стержнях вторичной обмотки протекает ток i 2 , ак-
тивная составляющая которого совпадает по направлению с ЭДС.
На проводники с током i2 , например
фазы А, находящиеся в магнитном поле, действуют в соответствии с законом Ампера силы F , под действием которых образуется вращающий момент, направление которого можно определить по правилу левой руки. Ротор приходит во вращение с числом оборотов n в сторону вращения магнитного поля (рис. 1.9, а). На рисунке стрелками показано направление вращения магнитного поля и ротора.
Число |
n меньше синхронной частоты вращения n1, так как в случае |
n = n1 |
пересечения проводников ротора магнитным полем статора не |
будет происходить, ток в обмотке ротора будет отсутствовать, и момент машины будет равен нулю.
Следовательно, вращение ротора происходит не синхронно с вращением магнитного поля статора. По этой причине двигатель получил название асинхронного двигателя.
Разность величин n1 - n определяет величину несинхронности вращения ротора и поля статора. Отношение этой величины к син-
хронной частоте вращения n1 называется скольжением |
s и является |
важной характеристикой двигателя |
|
s = (n1 − n) n1 . |
(1.17) |
19 |
|