

Разное4 / sopromat_zoi_doc / Отчёт по сопру 2
.doc

Российский химико-технологический университет имени Д. И. Менделеева
Кафедра прикладной механики
Отчёт о лабораторной работе № 2 «Плоская рама»
Отчёт выполнил: Голубенко Иван Сергеевич, гр. ВК-24
Отчёт проверил: Антонов Сергей Игоревич
1. Цель работы
Экспериментальное определение перемещений и углов поворота подвижной шарнирной опоры и сравнение их с расчётными данными
2. Схема и условие
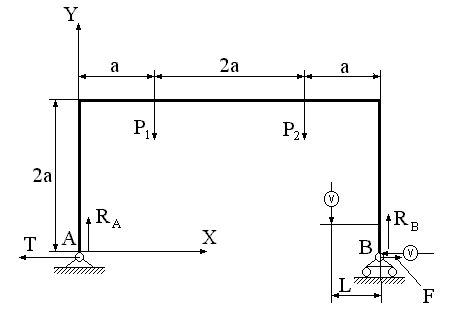
Дано:
a = 150 мм
b = 30 мм
h = 5 мм
E = 2,2 * 105 МПа
L = 100 мм
Определить экспериментально:
-Перемещение подвижной опоры B и угол поворота вертикальной части рамы
Определить по расчёту:
-Эпюры MZ и My
-Перемещение подвижной опоры B и угол поворота вертикальной части рамы
-Ошибку опытного определения в %
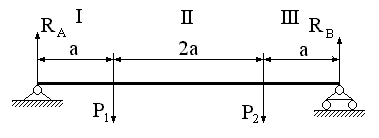
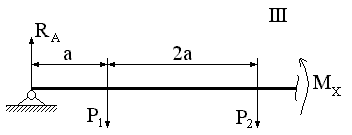
3. Расчёт реакций опор RA и RC
ΣMA = 0 и ΣMB = 0
4aRA – 3aP1 – aP2 = 0
RA = 0,75P1 + 0,25P2
-4aRB + 3aP2 + aP1 = 0
RB = 0,75P2 + 0,25P1
Проверка:
ΣFY = 0
RA + RB – P1 – P2 = 0
0,75P1 + 0,25P2 + 0,75P2 + 0,25P1– P1 – P2 = 0. Верно
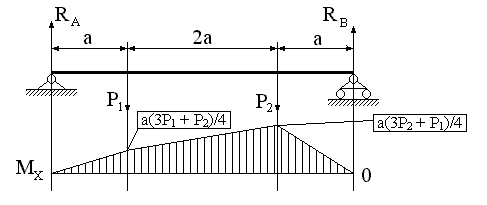
4. Построение эпюры МX
Мысленно представим раму, как балку одного измерения, т.к. вертикальные части не влияют на эпюру MX
1 Участок
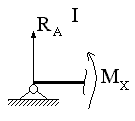
MX1 = RAX = (0,75P1+0,25P2)X
2 Участок
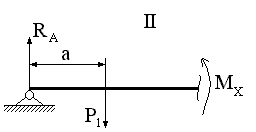
MX2= (P2 – P1)X/4 + P1a
3 Участок
MX3= -(0,25P1 + 0,75P2)X + (P1 + 3P2)a
Случай P1 > P2
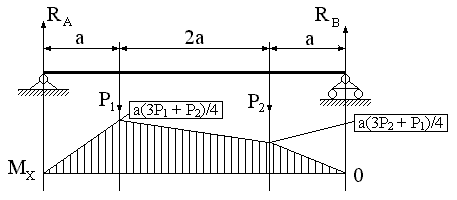
Случай P1 < P2
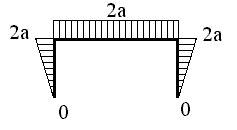
5. Построение эпюры МY
Мы ввели дополнительные единичные силы F и T (см. в условии), равные между собой, возникающие в результате действия сил P1 и P2. Эти силы обуславливают моменты MY. Условно разделим раму на 3 участка:

Как видно, для 2-го участка плечо сил F или T (какая сила – зависит от того, с какой стороны «резать» сечения) постоянно и равно 2a. Для участков 1 и 3, если учитывать, что силы единичны, MY = Y, где Y – расстояние от точки опоры до сечения. Соответственно MY убывает сверху вниз по линейному закону. Эпюра MY:
6. Расчёт перемещения опоры и угла поворота
U(P1,P2) = a11P12 + a12P1P2 + a22P22
ðU/ðP1 = δ1
U = U1 + U2 + U3 = ∫ (R12dl)/αES1 + ∫ (R22dl)/αES2 +
+ ∫ (MX2dz)/2EIX, R – дополнительная единичная сила
δ1 = ∫ (R12dl(ðR1/ðP1))/ES1 + ∫ (R22dl(ðR2/ðP2))/ES2 +
+ ∫ (MXdz(ðM/ðP1))/EIX
Ввиду малости двух первых слагаемых, ими можно пренебречь
ΔX = ∫MX(ðMX/ðF)/EIX – Перемещение опоры
φ = ∫MX(ðMX/ðM)/EIX – Угол поворота
7. Экспериментальное нахождение перемещения опоры и угла поворота. Проведение работы
Экспериментальная модель представляет собой плоскую раму, толщиной h, шириной b. Эти параметры даны в условии. Один конец рамы жёстко заделывается, второй конец находится на подвижной опоре, к которой подсоединены два измерительных прибора. Один – для измерения перемещения, другой – для измерения угла поворота. На верхнюю горизонтальную часть рамы привешиваются симметрично на расстоянии 2a друг от друга два груза, создающие силы P1 и P2
Угол поворота определяется в соответствии со следующей схемой:
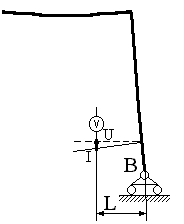 Расстояние
UI
=
δ
Расстояние
UI
=
δ
φ = δ/L
8. Таблица экспериментальных и расчётных данных
|
№ |
P1, Н |
P2, Н |
ΔXпр., мм |
ΔXтеор., мм |
Ошибка ΔX, % |
δ, мм |
φпр., рад*10-2 |
φтеор., рад*10-2 |
Ошибка φ, % |
|
1 |
10 |
10 |
3,18 |
2,945 |
7,39 |
0,53 |
0,53 |
0,98 |
85 |
|
2 |
10 |
20 |
4,83 |
4,418 |
8,53 |
0,83 |
0,83 |
1,47 |
73 |
|
3 |
20 |
20 |
6,64 |
6,84 |
3,01 |
1,10 |
1,10 |
1,06 |
3,6 |
|
4 |
0 |
10 |
1,52 |
1,473 |
2,99 |
0,32 |
0,32 |
0,49 |
53 |
|
5 |
10 |
0 |
1,55 |
1,473 |
4,96 |
0,21 |
0,21 |
0,49 |
133 |