

3341 ЭИ
.pdfКоэффициент полезного действия выбирается из табл. 3.1 [2]. Если номинальная мощность Рдн отличается от указанной в табл. 3.1, то КПД определяется методом интерполяции. Например, при Рдн = 520 кВт:
ηдн = (520 − 400)0,93 − 0,92 + 0,92 = 0,926. 600 − 400
Таблица 3.1
Зависимость КПД номинального режима от мощности тягового двигателя
Номинальная мощность Рдн , кВт |
200 |
400 |
600 |
800 |
|
|
|
|
|
КПД ηдн |
0,9 |
0,92 |
0,93 |
0,94 |
Сила тяги на ободе колеса, кН:
Fкн = |
3,6Pдн ηдн |
, |
(3.2) |
|
Vн |
|
|
где Vн – скорость электровоза в номинальном режиме, км/ч.
Скорость номинального режима связана со скоростью на расчетном подъеме соотношением [1]:
Vн = 1,04Vp , |
(3.3) |
||
где Vp – см. (2.3), |
|
||
Суммарное сопротивление обмоток двигателя, Ом: |
|
||
rД = |
0,04Uдн |
, |
(3.4) |
|
|||
|
Iдн |
|
|
и распределяется по элементам цепи двигателя в соответствии с табл. 3.2 [1].
Таблица 3.2
Сопротивления отдельных обмоток двигателя в долях от суммарного сопротивления
Обмотка |
Сопротивление двигателя |
||
|
|
||
некомпенсированного |
компенсированного |
||
|
|||
|
|
|
|
Якорь, ra |
0,45 rд |
0,4 rд |
|
Дополнительный полюса, rдп |
0,2 rд |
0,1 rд |
|
Главные полюса, rгп |
0,35 rд / β0 |
0,25 rд / β0 |
|
Компенсационная обмотка, rко |
– |
0,25 rд |
|
Примечание: в проекте принимать некомпенсированный двигатель и β0 = 1.
11
Для построения нагрузочной характеристики необходимо вычислить соответствующий магнитный поток двигателя номинальному режиму [4], В/(км/ч):
|
|
|
|
|
CvФн = |
Uдн − Iдн rд |
, |
|
|
|
|
|
(3.5) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
Vн |
|
|
|
|
|
|
|
|
|
|
|
где Uдн = 1500 В; |
Iдн – см. (3.1); |
rд – см. (3.4); |
|
|
Vн – см. (3.3); |
|
|
|
|
|||||||||
|
В соответствии с методом аналогии [1], характеристики двигателя рассчитывают на |
|||||||||||||||||
основе относительных значений [1], приведенных в табл. 3.3. |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 3.3 |
||
|
Расчетные значения относительных характеристик тягового двигателя, приведенных |
|||||||||||||||||
|
|
|
к ободу колеса, в долях от параметров номинального режима |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I / Iдн |
|
0,3 |
0,4 |
0,6 |
|
0,8 |
|
1,0 |
|
1,2 |
1,4 |
|
1,6 |
|
1,8 |
|
|
|
CvФ/CvФн |
|
0,56 |
0,68 |
0,83 |
|
0,93 |
|
1,0 |
|
1,05 |
1,1 |
|
1,14 |
|
1,17 |
|
|
|
V / Vн |
|
1,76 |
1,51 |
1,22 |
|
1,08 |
|
1,0 |
|
0,94 |
0,89 |
|
0,86 |
|
0,83 |
|
|
|
Fк/Fкн |
|
0,14 |
0,24 |
0,48 |
|
0,75 |
|
1,0 |
|
1,27 |
1,53 |
|
1,79 |
|
2,05 |
|
|
При переходе от относительных значений к абсолютным в табл. 3.3 в ту ее графу, где соотношение равно 1,0, записать данные, полученные в (3.1), (3.2), (3.3) и (3.5). Остальные цифры в табл. 3.3 получают как произведения записанных первоначально данных на соответствующие коэффициенты.
Например, в строке 1 колонки 1 при Iдн = 1000 А запишем: 0,3 1000 А = 300 А.
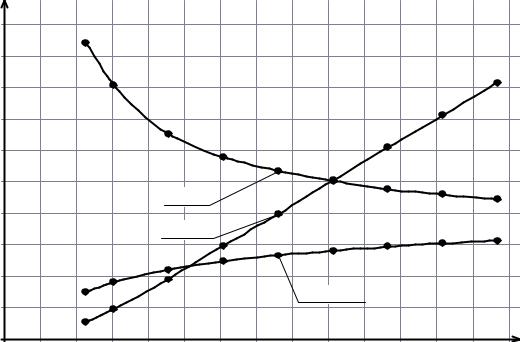
По данным табл. 3.3 для абсолютных значений строятся характеристики двигателя, которые имеют вид, показанный на рис. 3.1.
1 0 0 |
C v Ф , В /км/ч |
|
|
|
|
|
|
|
|
|
|
|
|
|
V , км/ч |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
9 0 |
F k , k H |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 0 |
|
|
|
|
V = f(I) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 0 |
|
|
|
|
F k = f(I) |
|
|
|
|
|
|
|
|
|
3 0 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 0 |
|
|
|
|
|
|
|
C v Ф = f(I) |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I, A |
0 |
6 0 |
1 2 0 |
1 8 0 |
2 4 0 |
3 0 0 |
3 6 0 |
4 2 0 |
4 8 0 |
5 4 0 |
6 0 0 |
6 6 0 |
7 2 0 |
7 8 0 |
8 4 0 |
Рис. 3.1. Характеристики тягового двигателя, приведенные к ободу колеса, т. е. при П-соединении ТЭД
12
3.2. Характеристики при последовательном и последовательно-параллельном соединениях
Как известно из [4], перегруппировка двигателей ступенчато изменяет напряжение на тяговом двигателе Uд. Поскольку сила тяги и магнитный поток не зависит от величины напряжения на двигателе [4], то показанные на рис. 3.1 зависимости F = f(I) и CvФ = f(I) будут соответствовать любому соединению двигателей.
Но скорость, развиваемая на ободе колеса, прямо зависит от Uд, и поэтому скоростные характеристики V = f(I) для разных соединений будут значительно отличаться друг от друга
Поскольку номинальное напряжение Uдн может быть получено лишь на параллельном (П) соединении двигателей, то приведенные к ободу колеса скоростные характеристики двигателя для последовательно-параллельного (СП) и последовательного соединений (С) могут быть рассчитаны на основе характеристики, показанной на рис. 3.1.
Для этого задаются каким-либо током I, а по зависимости V=f(I) рис. 3.1 определяют соответствующую этому току скорость V по формулам:
Vсп = |
|
Uсп − I rд |
Vп |
(3.6) |
||
|
|
|
||||
|
|
|
Uп − I rд |
|
||
и |
|
Uс − I rд |
|
|
|
|
V = |
|
V , |
(3.7) |
|||
|
|
|||||
с |
|
|
|
|
п |
|
|
Uп − I rд |
|
||||
где Uп, Uсп, Uс – напряжения на двигателях при соответствующих соединениях двигателей, В;
I – выбранные значения тока, А (к примеру, девять раз по рис. 3.1); Vп – соответствующее этому току значение скорости, км/ч;
rд – сопротивление двигателя, Ом (3.4).
Находят соответствующие значения скорости на соединениях СП и С. Расчеты выполняются для ряда значений тока (удобно использовать значения первой строки из табл. 3.3). Результаты расчета целесообразно представить в виде табл. 3.4, причем количество столбцов табл. 3.4 будет зависеть от используемых соединений двигателей на электровозе-аналоге (Приложение), а количество строк должно соответствовать количеству интервалов, на которые поделены кривые на рис. 3.1 (к примеру девять, как показано на рис. 3.1).
|
|
|
|
|
|
|
|
Таблица 3.4 |
|
|
|
Скоростные характеристики П, СП и С соединений двигателей |
|||||||
|
|
|
|
|
|
|
|
|
|
I, А |
|
Vп , км/ч |
Uп – Irд, В |
Uсп – Irд, В |
Vсп , км/ч |
Uс – Irд, В |
Vс , км/ч |
||
I1 |
= |
|
|
|
|
|
|
|
|
… |
|
|
|
|
|
|
|
|
|
I9 |
= |
|
|
|
|
|
|
|
|
|
|
13 |
|
|
|
|
|||
В соответствии с данными табл. 3.4 строятся зависимости V = f(I) для П (рис. 3.1), СП и С соединений, или СП и П соединений для 12-осного электровоза ВЛ11.
3.3. Характеристики ослабленного возбуждения
Ослабление возбуждения приводит, при прочих равных условиях, к изменению как силы тяги, так и скорости.
Сначала необходимо получить характеристики для βmin (задание), а потом определить количество ступеней регулирования ослабления возбуждения магнитного поля и характеристики каждой из них. С этой целью используют соотношения
I |
|
= |
I |
и F |
= |
F |
, |
(3.8) |
|
oп |
|
β |
oп |
|
β |
|
|
где Iоп , I – токи двигателя для режимов ослабленного и полного магнитного поля (ОП и ПП);
Fоп , F – силы тяги для ослабленного и полного возбуждения;
β – коэффициент ослабления возбуждения для соответствующей ступени, а также графический способ построения характеристик, который приведен в [5].
Для определения числа ступеней ослабления магнитного поля и значений этих ослаблений предлагается следующий упрощенный способ: для студентов, у которых по варианту значения лежат в диапазоне βmin = 0,3 ÷ 0,37, предлагается принять 5 ступеней ослабления, а для диапазона βmin = 0,38 ÷ 0,44 предлагается принять 4 ступени. Сами значения ступеней ослабления принимают вследствие равномерного деления интервала между βmin и 1 на соответственно 4 и 5 ступеней. К примеру, βmin = 0,32. Тогда значение
интервала между 1 и 0,32 равно: |
1 – 0,32 = 0,68. |
|
||
Так как при βmin = 0,32 предлагается 5 ступеней ослабления, то равномерный шаг по |
||||
каждой ступени равен: 0,68/5 = 0,136, тогда |
|
|
|
|
значение первой ступени ослабления равно: |
β 1 = 1 – 0,136 = 0,864; |
|||
значение второй ступени |
|
β 2 = 0,864 – 0,136 |
= 0,728; |
|
|
|
β 3 |
= 0,728 – 0,136 |
= 0,592; |
|
|
β 4 |
= 0,592 – 0,136 |
= 0,456; |
|
|
β 5 |
= 0,456 – 0,136 |
= 0,32 = β min ОП . |
На практике необходимое количество ступеней ослабления магнитного поля колеблется в пределах от 3 до 5. Их количество определяется в соответствии с коэффициентом неравномерностипускапотокуКнi, которыйдляослабленногополяравен[6]:
Кнi = |
Imax − Imin |
≤ 0,15 , |
(3.9) |
|
Imax + Imin |
||||
|
|
|
где Imax – максимальная величина тока после перехода на следующую ступень ОП, A;
Imin – минимальная величина тока перед переходом на следующую ступень ОП, А.
14
|
Окончательные скоростные характеристики ослабленного возбуждения (на |
|||||||||
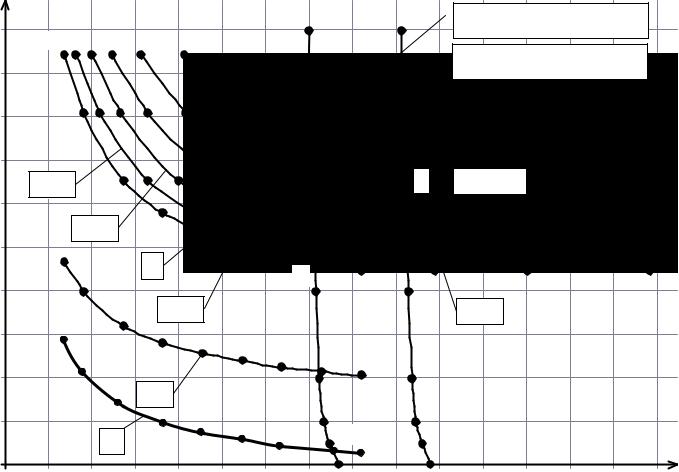
примере пяти ступеней ослабления магнитного поля) переносят на рис. 3.2. |
||||||||||
100 |
V, км/ч |
|
|
|
|
|
|
|
|
для тока Imax при ОПmin |
Fk, kH |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
для тока Imax при ПП |
|
90 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
80 |
|
|
|
|
|
|
|
|
Ограничение по сцеплению |
|
|
|
|
|
|
|
|
|
|
|
|
70 |
|
|
|
|
|
|
|
|
B |
ОП min |
60 |
ОП1 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
50 |
|
ОП2 |
|
|
|
|
|
|
|
|
|
|
П |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
40 |
|
|
|
|
|
|
|
|
|
|
|
|
|
ОП3 |
|
|
|
|
|
ОП4 |
|
|
|
|
|
|
|
|
|
|
||
30 |
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
20 |
|
|
СП |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
10 |
|
C |
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
|
|
I, A |
||
0 |
100 |
200 |
300 |
400 |
500 |
600 |
700 |
800 |
900 1000 1100 1200 1300 1400 1500 |
|
|
Рис. 3.2. Скоростные характеристики ТЭД. Ограничения тока двигателя по сцеплению |
|||||||||
Сила тяги электровоза складывается из сил тяги каждого из двигателей, отнесенных к ободам колес:
Fк = Fкд m , |
(3.10) |
где Fкд – см. табл. 3.3; m – см. (2.5).
Результаты расчетов удобно поместить в табл. 3.5.
Первые две строки заполняются для полного магнитного поля ПП. Девять значений токов в первую строку табл. 3.5 взять из табл. 3.3. Там же искать соответственно девять значений Fкдi для второй строки таблицы. Следующие строчки для каждой ступени ослабления ОПi определяем по (3.8): вначале девять значений Iопi и соответственно им девять значений Fкд опi. Строки по определению сил тяги всего электровоза для полного поля и каждой ступени ослабления поля Fкi заполнить на основании (3.10).
15
Таблица 3.5
Расчетные данные силы тяги двигателя и всего электровоза для полного и ослабленных магнитных полей
Параметры |
|
|
Значения |
|
|
1 |
2 |
|
. . . . . |
9 |
|
|
|
||||
I пп , А |
|
|
|
|
|
Fкд пп , кН |
|
|
|
|
|
|
|
|
|
|
|
I оп1 , А |
|
|
|
|
|
Fкд оп1 ,кН |
|
|
|
|
|
I оп2 , А |
|
|
|
|
|
Fкд оп2 , кН |
|
|
|
|
|
………. |
|
|
|
|
|
I оп min , А |
|
|
|
|
|
F кд оп min , кН |
|
|
|
|
|
F к пп , кН |
|
|
|
|
|
F к оп1 ,кН |
|
|
|
|
|
F к оп2 ,кН |
|
|
|
|
|
………. |
|
|
|
|
|
Fк оп min , кН |
|
|
|
|
|
|
|
|
|
|
|
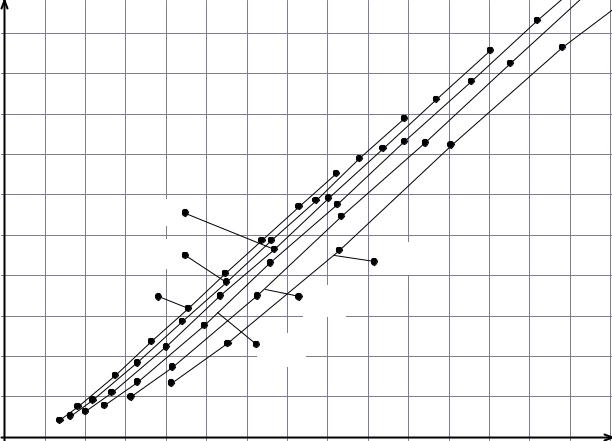
По данным табл. 3.5 построить характеристики силы тяги двигателя Fкдi для полного поля и всех ступеней ослабления Fкдi = f(I), при этом следует помнить, что для каждой ступени ослабления поля следует выбирать только соответствующие ей значения тока при конкретном ослабленном поле. Они имеют вид, показанный на рис. 3.3. Построения выполняем по данным рис. 3.1, берем значения первой точки V1 и для нее определяем значения I1 и F1 . Производим вычисления значений I1 и F1 для ослабления поля на соответствующую ступень ослабления:
IОП1 = I1 / β1 и FОП1 = F1 / β1 .
Откладываем на рис. 3.1 первую точку зависимости FОП1 = f(IОП1). Аналогичные вычисления повторяем для остальных значений скорости (рис. 3.1). Получаем зависимость FОПi = f(IОПi) для первой ступени ослабления поля.
Затем выполняем всю последовательность действий для остальных ступеней ослабления поля, полученные результаты вычислений для отдельного ТЭД (IКДОПi и FКДОПi) сводим в верхнюю часть табл. 3.5. В нижнюю часть табл. 3.5 подставляем значения силы тяги всего электровоза FКОПi при различных ступенях ослабления поля.
16
1500 |
Fk, kH |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1350 |
|
|
|
|
|
|
|
|
|
1200 |
|
|
|
|
|
|
|
|
|
1050 |
|
|
|
|
|
|
|
|
|
900 |
|
|
|
Fкоп2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
750 |
|
|
|
Fкоп1 |
|
|
|
|
Fк оп |
|
|
|
|
|
|
|
|
||
600 |
|
|
|
|
|
|
|
|
Fоп min |
|
|
Fкk |
|
|
|
оп4 |
|
||
|
|
|
|
|
|
|
|||
450 |
|
|
|
|
|
|
|
Fк оп4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
оп3 |
|
|
300 |
|
|
|
|
|
|
Fк оп3 |
|
|
|
|
|
|
|
|
|
|
|
|
150 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I, A |
0 |
100 |
200 |
300 |
400 |
500 |
600 |
700 |
800 |
900 1000 1100 1200 1300 1400 15 |
|
|
|
Рис. 3.3. Характеристики силы тяги электровоза |
||||||
4. ПУСКОВЫЕ РЕЗИСТОРЫ И ХАРАКТЕРИСТИКИ
Количество позиций регулирования скорости на ЭПС с пусковыми резисторами зависит от коэффициентов неравномерности пуска по току (3.9), причем на пусковых позициях КHI ≤ 0,07 ÷ 0,08 [4]. При этом желательно, чтобы Imax (см. (3.9)) обеспечивал бы такую силу тяги, которая была бы близка к предельной по условиям сцепления колеса
срельсом.
4.1.Ограничение пускового режима по сцеплению колеса с рельсом
Предельные значения тока двигателя по условиям сцепления определяют по
зависимостям Fкд i =f(I) (см. рис. 3.3), вычислив предварительно [4], кН:
F кд max =Ψк ( М · g/m) , |
(4.1) |
где ψк – расчетный коэффициент сцепления; М – масса электровоза, т (см. (2.6));
g – ускорение свободного падения, м/с2; m – количество двигателей электровоза.
17
Коэффициент сцепления для ЭПС постоянного тока [7]:
|
Ψ = 0,28 + |
|
3 |
|
− 0,0007V , |
(4.2) |
|
|
|
|
|||
|
к |
50 |
+ 20V |
|
|
|
|
|
|
|
|||
где V – скорость электровоза, км/ч. |
|
|
|
|
|
|
Задавшись скоростью движения V (см. табл. 4.1) , по (4.2) определяют значения ψк, а |
||||||
затем по (4.l) – |
значения Fкд max. Далее для каждого полученного в табл. 4.1 значения |
|||||
Fкд max по рис. |
3.3 определяют максимальные |
по сцеплению колеса |
с рельсом токи |
|||
I max при ПП и I max при ОП min. Результаты расчетов для ряда выбранных значений скорости движения удобно занести в табл. 4.1. Полученные в табл. 4.1 зависимости I max при ПП = f(V) и I max при ОП min = f(V) нанести на рис. 3.2. Точка пересечения I max при ПП = f(V) (точка А) с кривой Vп = f(I) лежит, кроме прочего, на прямой линии ограничения по сцеплению в области ослабленного возбуждения. Другой точкой, характеризующей указанное ограничение в области ОП, будет пересечение I max при ОП min = f(V) с характеристикой Vоп min = f(I) (см. рис. 3.2 точки A и B). На других позициях ослабления поля ограничение по сцеплению определяются как точки пересечения прямой AB с характеристиками Vоп1 = f(I) , Vоп2 = f(I) и т. д. Кроме того, точкой L отмечено пересечение кривой I max при ПП = f(V) с кривой Vсп = f(I), а точкой M – пересечение кривых I max при ПП = f(V) с кривой Vс = f(I).
|
|
|
|
|
|
|
|
Таблица 4.1 |
||
|
Расчетные параметры ограничения по сцеплению |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
V, км/ч |
0 |
5 |
10 |
20 |
40 |
60 |
80 |
|
100 |
|
ψк |
|
|
|
|
|
|
|
|
|
|
Fкд max , кН |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Imax при ПП , А |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Imax при ОП min , А |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4.2.Ступени пускового резистора
Впроекте предлагается использовать метод аналогий с существующими типами локомотивов [8], для чего рассчитывается величина пускового резистора на первой маневровой позиции, Ом:
|
Uc |
′ |
1 |
, |
(4.3) |
|
R1 = |
− m rд |
|||||
I1M |
n′ |
|||||
|
|
где Uc = 3000 В – напряжение в контактной сети; I1м – ток первой маневровой позиции;
m' – количество тяговых двигателей, включенных последовательно;
n' – количество параллельных цепей двигателей (для электровоза ВЛ11 n' = 3, для других электровозов n' = 1);
rд – см. (3.4).
18
Ток первой маневровой позиции выбирается из условия разгона одиночного локомотива на площадке с ускорением dV/dt =0,3 ÷ 0,4 м/сек2 [6]. Согласно [1] (см. (3.1)) принимают:
I1м=0,3Iдн. (4.4)
Используя таблицу соединения секций на каждой позиции контроллера машиниста (см. Приложение) в зависимости от электровоза-аналога, рассчитывают сопротивления пускового резистора на каждой позиции контроллера машиниста электровоза [3]:
Ri = R1 λ, |
(4.5) |
где Ri – сопротивление i-й позиции пускового резистора; R1 – см. (4.3);
λ – соотношение Ri / R1 (см. Приложение).
4.3. Скоростные характеристики режима пуска
Скоростные характеристики каждой позиции Vi = f(I) определяет выражение, км/ч:
|
|
n′ |
|
|
|
|
Uд − I Ri |
|
+ rд |
|
|
|
′ |
|
|||
Vi = |
|
m |
|
, |
(4.6) |
СvФ |
|
||||
|
|
|
|
||
где Uд – напряжение на двигателе, В (например, для всех позиций П-соединения двигателей Uд = 1500 В);
I – ток двигателя, А (задается из табл. 3.3); СvФ – см. табл. 3.3 и рис. 3.1, В/(км/ч);
m' – число последовательно соединенных двигателей; n' – число параллельно соединенных цепочек двигателей.
Для построения семейства характеристик Vi = f(I) задаются каким-либо значением тока I (удобно брать значения I из табл. 3.3, используя номинальное значение тока и его относительные значения по отношению к номиналу). Из табл. 3.3 или рис. 3.1 находят соответствующую выбранному значению тока I величину CvФ. Из выражений (4.5) и (3.4) определяют Ri и rд. Количество последовательно соединенных двигателей m' зависит от их группировки (С, СП, П). Подставляя все это в (4.6), определяют соответствующее выбранному значению тока I значение скорости V. Затем задаются другим значением тока I и для него по (4.6) находят соответствующее значение скорости V, и так далее. Все найденные значения скорости образуют кривую Vi = f(I) для i-й позиции.
Подобный расчет выполняется для каждой другой позиции. Ясно, что такие многовариантные расчеты лучше доверить ЭВМ.
19
Если на первых позициях используют ослабление возбуждения (см. Приложение, табл. 1, 2), то скоростные характеристики для этих позиций рассчитывают также в соответствии с (4.6), но значение CvФ определяют из рис. 3.1 для значений токов возбуждения:
Iв = Iβi , |
(4.7) |
где I – значение тока якоря, которым задаются, А;
βi – коэффициенты ослабления возбуждения, найденные в п. 3.3 для ОП1, ОП2,
ОП3, …, ОПmin .
По результатам расчета строят семейство характеристик Vi = f(I), вид которых показан на рис. 4.1.
На рис. 4.1 нанести ограничение по сцеплению (см. табл. 4.1 и рис. 3.2). Здесь же показать скоростные характеристики ОП.
Точка пересечения ограничения по сцеплению с безреостатной скоростной характеристикой полного поля (точка A рис. 3.2) определит на рис. 4.1 значение Imax. Ток Imin определяется точкой пересечения горизонтали, проведенной из точки A до пересечения с характеристикой предыдущей позиции (см. рис. 4.1). Ломаная линия, выделенная на рис. 4.1 утолщенными линиями, называется пусковой диаграммой. На этом же рисунке видны маневровые (1–9 позиции) и дополнительные позиции
(23–26 позиции).
5. СИСТЕМА РЕКУПЕРАТИВНОГО ТОРМОЖЕНИЯ
Разработка системы рекуперативного торможения ЭПС зависит от системы управления, использованной в тяговом режиме, так как желательно использовать, по возможности, одно и то же оборудование в обоих режимах.
Поскольку система управления тяговым режимом предусматривает неавтоматическое ступенчатое регулирование напряжения на тяговых двигателях с перегруппировкой двигателей, то в проекте предлагается рассчитать параметры и характеристики системы рекуперативного торможения с противовозбуждением вращающегося возбудителя (по аналогии с электровозами ВЛ8, ВЛ10, ВЛ11). При этом для каждого проектируемого электровоза должен быть спроектирован или подобран возбудитель и система управления им. Однако это сама по себе сложная и трудоемкая работа. Поэтому в проекте предлагается использовать типовой электромашинный возбудитель, приспособив его к параметрам и количеству тяговых двигателей электровоза, что является допущением.
20