

3341 ЭИ
.pdf63
56
49
42
35
28
21
14
7
0 |
100 |
200 |
300 |
|
-7
-14
-21
1
400 |
4
3 |
B
A
45
44
43
42
41
L |
|
40 |
|
|
|
36 |
|
|
|
35 |
39 |
|
|
34 |
|
|
|
33 |
38 |
|
|
32 |
|
|
|
|
|
|
|
31 |
|
|
|
30 |
37 |
|
|
|
|
|
M |
29 |
|
|
28 |
|
|
|
|
|
|
|
|
22 |
|
|
|
21 |
27 |
|
|
20 |
|
|
|
|
|
|
|
19 |
|
|
|
18 |
|
|
|
17 |
26 |
|
|
16 |
|
|
|
|
|
|
|
15 |
|
|
|
14 |
|
|
|
13 |
25 |
|
|
12 |
|
|
|
|
|
|
|
11 |
24 |
500 |
600 |
23 |
|
10 |
|||
|
|
||
|
|
9 |
6 |
8 |
|
|
|
7 |
5 |
|
2
Рис. 4.1. Скоростные характеристики электровоза и пусковая диаграмма
21
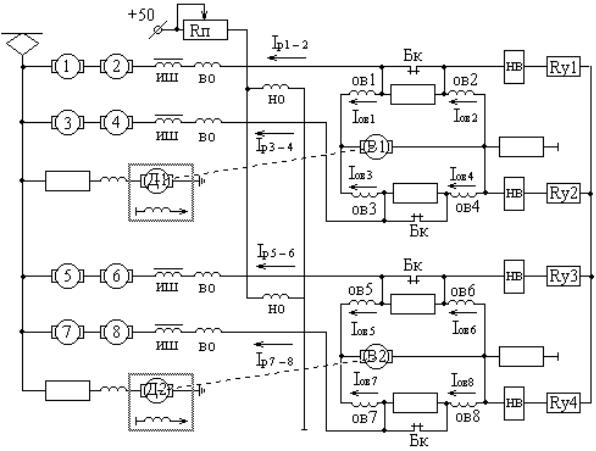
5.1. Расчетная схема и исходные данные
Расчетная схема для режима рекуперативного тормоза показана на рис. 5.1 [3]. В ней количество якорей тяговых двигателей (ТД), соединенных последовательно зависит от группировки двигателей (П, СП, С). Группировкой же определяется величина стабилизирующего резистора (Rcт). Для проектируемого электровоза с допущениями примем такую же схему и величины Rcт для разных соединений двигателей, как на электровозе BЛ10 (см. рис. 5.1).
Рис. 5.1. Расчетная схема режима рекуперативного торможения
Количество возбудителей на электровозе зависит от общего количества тяговых двигателей и задается; для шестиосного электровоза – один, для восьмиосного – два, для двенадцатиосного – три.
Обмотки возбуждения тяговых двигателей соединяются в две параллельные группы по три для шестиосного и по две для электровозов с большим количеством двигателей.
В качестве возбудителя принимается НБ-436Б. Необходимые для расчетов параметры такого возбудителя [3]: номинальный ток возбудителя Iвн = 800 А; сопротивление обмотки якоря rr = 0,00896 Ом; сопротивление обмотки противовозбуждения возбудителя (ПВВ) rпвв = 0,00192 Ом.
Резистор Rр (см. рис. 5.1) позволяет получить 15 позиций регулирования режима рекуперативного тормоза.
22
При напряжении в контактной сети Uкс = 3300 В, которое является расчетным для рекуперативного торможения, зависимость между ЭДС на зажимах генератора возбудителя (Г) от позиций регулирования, рассчитанная по формуле [3], В:
Ег = Iв (Rг + r гп а/в), |
(5.1) |
где I в– ток возбудителя, А (см. (5.2));
Rг = 0,00896 Ом – сопротивление обмотки якоря возбудителя;
rгп – сопротивление обмотки главных полюсов тягового двигателя (см. табл. 3.2); а – количество последовательно соединенных обмоток возбуждения;
в – количество параллельных цепей обмоток возбуждения (см. рис. 5.1), определяется из нагрузочной характеристики возбудителя [3], для НБ-436Б в = 2.
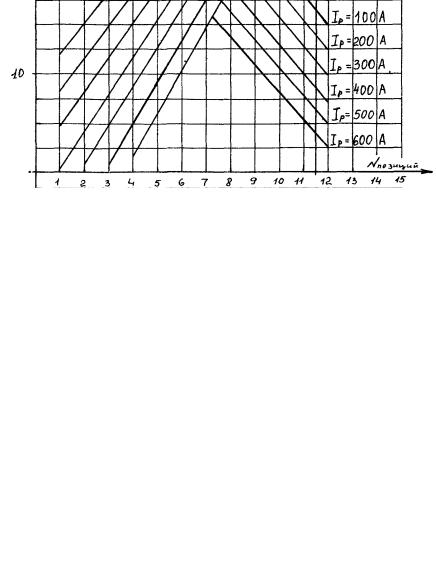
Зависимость между ЭДС генератора возбудителя НБ-436Б от номера позиции регулирования (всего их 15) показана на рис. 5.2. Она представляет собой семейство характеристик для разных токов рекуперации.
Рис. 5.2. Зависимости ЭДС возбудителя НВ-436Б от позиций регулирования
при UKС = 3300 В и разных токах рекуперации IР 23

В соответствии с рис. 5.2 можно определить ток возбудителя (см. рис. 5.1) на любой позиции из следующего выражения, А:
IВ |
= |
|
Eг |
, |
(5.2) |
|
Rг |
+ rгп а в |
|||||
|
|
|
|
где Ег – см. рис. 5.2, В.
Другие составляющие (5.2) смотреть в (5.1). Например, для того чтобы определить IВ на 10-й позиции при токе рекуперации Ip = 300 А, на рис. 5.2 провести вертикаль, соответствующую 10-й позиции, до пересечения с линией зависимости Ег = f(N) для тока Ip = 300 А и по положению точки пересечения определить Ег. Подставив значение Ег в (5.2), определим IВ.
При этом ток, проходящий в обмотке возбуждения двигателя IОВ (см. рис. 5.1), составит:
IОВ = |
IВ |
, |
(5.3) |
|
в |
||||
|
|
|
где IВ – см. (5.2); в – см. (5.1).
5.2. Тормозные характеристики
Тормозной характеристикой называют зависимость между тормозным усилием и скоростью движения В = f(V). Другой важной характеристикой режима рекуперативного тормоза является зависимость между скоростью движения и током в тяговом двигателе
V = f(Ip).
Тормозное усилие, развиваемое электровозом, складывается из тормозных усилий каждого двигателя, кН:
|
3,6 10− 3 |
|
|
|
|
|
|
В = m |
|
С |
ФI |
p |
+ |
B , |
(5.4) |
|
|||||||
|
ηзп ηд |
v |
|
|
|
|
|
|
|
|
|
|
|
|
где m – количество тяговых двигателей на электровозе; Ip – ток якоря двигателя в режиме рекуперации, А; CvФ – см. табл. 3.3 в абсолютных значениях, В/(км/ч); ηзп = 0,975 – КПД зубчатой передачи [3]; ηд – КПД двигателя (см. табл. 3.1);
В – добавочное тормозное усилие, связанное с механическими и электрическими потерями мощности.
Если с допущениями принять, что В составляет 3 % от первого слагаемого в (5.4), то тормозное усилие можно представить, кН:
В= |
1,03 3,6 m |
СvФIp 10− 3 . |
(5.5) |
|
|||
|
ηзп ηд |
|
|
|
24 |
|
|
Зависимость скорости от тока в якоре определяется выражением
V = |
Uкс + IpRт |
, |
(5.6) |
nСvФ |
|
||
где UKС = 3300 В – расчетное значение напряжения в контактной сети для тормозного режима;
Ip – ток в якоре двигателя в тормозном режиме (ток рекуперации), А;
Rт – общее сопротивление цепи якоря двигателя (зависит от группировки двигателей П, СП, С), Ом;
n – количество якорей тяговых двигателей, соединенных последовательно (зависит от группировки двигателей П, СП, С);
СvФ – см. (3.5) и рис. 3.1, B/(км/ч).
Общее сопротивление цепи якоря двигателя (см. рис. 5.1), Ом:
Rт = n(ra+ rдп+ rко )+rппв +Rcт rш, |
(5.7) |
где n – см. (5.6);
ra, rдп, rко – см. табл. 3.2 и (3.4); rппв = 0,00192 Ом – см.(5.1);
rш = 0,025 Ом (сопротивление индуктивного шунта); Rст – возможны 2 варианта:
Rстп = 0,116 Ом для параллельного соединения якорей двигателей [12]; Rстсп = 0,348 Ом для CП и С соединений якорей двигателей [12];
5.3. Последовательность расчета характеристик
Расчет характеристик производится в следующем порядке:
1)Выбрать количество возбудителей на проектируемом электровозе.
2)На основе рис. 5.1 изобразить расчетную схему режима рекуперативного тормоза для Вашего электровоза.
3)Задаться величиной тока якоря при рекуперации (например, Ip = 0 А).
4)Задаться группировкой якорей двигателей (например, П).
5)Задаться позицией регулирования тормозного режима (максимальное число позиций – 15, лучше начать с позиции 1).
6)Из рис. 5.2 для выбранной позиции регулирования и выбранного тока якоря Iр определить Ег (5.1).
7)По формуле (5.3) с учетом (5.2) и (5.1) определить IОВ.
8)По рис. 3.1 для найденного в п. 7 значения IОВ определить CvФ.
9)По формуле (5.5) с учетом (5.4) для выбранного в п. 1 тока Ip и найденного в п. 8 значения CvФ определить тормозное усилие В.
10)По формуле (5.7) определить Rт (учесть изменения Rст).
25
11)По формуле (5.6) для заданного в п. 3 значения Ip и найденного в п. 8 CvФ вычислить V.
12)Изменить группировку двигателей (например, с П на СП).
13)Выполнить расчеты по пп. 10 и 11 для выбранного в п. 12 соединения при выбранной в п. 5 позиции регулирования.
14)Изменить группировку двигателей (например, с СП на С).
15)Выполнить расчета по пп. 10 и 11 для выбранного в п. 14 соединения при выбранной в п. 5 позиции регулирования.
16)Занести результаты расчетов в пп. 7, 8, 9, 11, 13 и 15 в табл. 5.1 в соответствующие колонки [3].
Таблица 5.1
Расчетные данные характеристик тормозного режима
|
|
|
|
|
|
Ток рекуперации |
|
|
|
|
|||
Пози- |
|
|
Ip = 0 А |
|
|
|
|
|
Ip = 200 А |
|
|
||
ция |
|
|
|
|
|
|
|
|
|
|
|
|
|
Iов, |
СvФ, |
В, |
Vп, |
Vсп, |
|
Vс, |
Iов, |
СvФ, |
В, |
Vп, |
Vсп, |
Vс, |
|
|
А |
В/(км/ч) |
кН |
км/ч |
км/ч |
|
км/ч |
А |
В/(км/ч) |
кН |
км/ч |
км/ч |
км/ч |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
: |
|
|
|
|
|
|
|
|
|
|
|
|
|
: |
|
|
|
|
|
|
|
|
|
|
|
|
|
15 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Пози- |
|
|
|
|
|
Ток рекуперации |
|
|
|
|
|||
ция |
|
|
Ip = 400 А |
|
|
|
|
|
Ip = 600 А |
|
|
||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
: |
|
|
|
|
|
|
|
|
|
|
|
|
|
: |
|
|
|
|
|
|
|
|
|
|
|
|
|
15 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
17)Повторить расчеты, начиная с п. 5 для всех 15 позиций регулирования тормозного режима.
18)Задаться другой величиной тока якоря Ip = 200 А. Повторить расчеты по пп. 4–17.
19)Задаться Ip = 400 А. Повторить расчеты по пп. 4–17.
20)Задаться Ip = 600 A. Повторить расчеты по пп. 4–17.
Вид характеристик тормозного режима В = f(V) и V = f(I) показан на рис. 5.3.
26
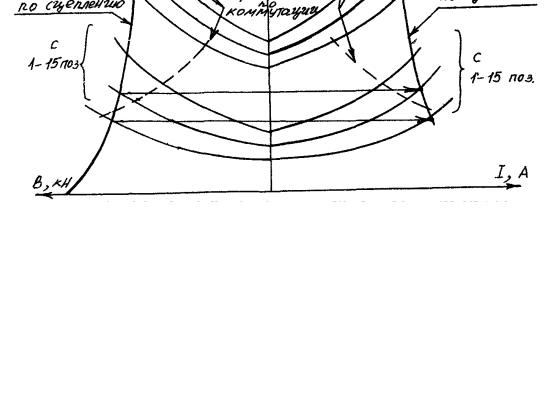
Рис. 5.3. Вид тормозных и скоростных характеристик для 1–15 позиций регулирования рекуперативного режима
5.4. Ограничения характеристик рекуперативного тормоза
Как и в режиме тяги, при управлении электровозом необходимо выполнить определенные условия, чтобы не допустить аварийных режимов.
5.4.1. Ограничение по максимальной скорости
Это ограничение определяется конструкционной скоростью электровоза и показано на рис. 5.3 в виде горизонтальной линии на уровне Vк (см. задание).
5.4.2. Ограничение тормозного режима по сцеплению колеса с рельсом
Это ограничение по своей природе не отличается от аналогичного в тяговом режиме, но срыв сцепления приводит не к буксованию, а к юзу.
Нарушение сцепления наступает в том случае, когда тормозное усилие превышает силу сцепления колеса с рельсом.
Предельные значения тормозного усилия для электровоза определит выражение, кН:
Вmax = ψкт М g, |
(5.8) |
где ψкт – расчетный коэффициент сцепления колеса с рельсом в режиме электрического торможения;
М – масса, электровоза (см. (2.6)), т;
g = 9,81 м/сек2 – ускорение свободного падения.
27
Расчетный коэффициент сцепления в тормозном режиме принимают на 20 % меньше, чем в тяговом [3]:
ψкт = 0,8ψк |
(5.9) |
где ψк – см. (4.2).
Задаются скоростью движения V и по формуле (5.9) с учетом (5.2) определяют ψкт. Подставляют найденное значение в (5.8), определяя Вmax. Расчетные значения ψкт и Вmax для ряда скоростей заносят в табл. 5.2.
На данным табл. 5.2 наносят ограничения по сцеплению на характеристики тормозного режима (рис. 5.3) сначала на В = f(V), а затем переносят на характеристики V = f(I). Для этого проводят горизонталь из точек пересечения ограничения по сцеплению с характеристиками В = f(V) позиций регулирования до пересечения с соответствующими характеристиками V = f(I) так, как это показано на рис. 5.3.
|
|
|
|
|
|
|
|
Таблица 5.2 |
||
|
Расчетные значения ограничений тормозного усилия по сцеплению |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
V, км/ч |
0 |
5 |
10 |
20 |
40 |
60 |
80 |
|
100 |
|
ψкт |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Вmax, кН |
|
|
|
|
|
|
|
|
|
|
5.4.3. Ограничение по максимальному току возбуждения. Выбор числа позиций рекуперативного торможения
Как показано в [13], максимальный ток в обмотках возбуждения можно принять с допущениями для рекуперативного режима:
Iов max = 1,1 Iдн , |
(5.10) |
где Iдн – см. (3.1).
Так как в расчетах использован возбудитель НБ-436В, то для проектируемого электровоза с учетом максимального тока возбуждения не всегда можно использовать все 15 позиций регулирования тормозного режима. То есть, ограничение по Iов max для конкретного типа возбудителя связано с возможным ограничением количества позиций регулирования.
Для определения числа возможных позиций регулирования необходимо в соответствии с (5.1) и (5.3) вычислить максимальное значение ЭДС генератора возбудителя, В:
Ег max = Iов max в(Rг + rгп а/в), |
(5.11) |
где Iов max – см. (5.10); остальные составляющие см. (5.1).
28
Затем на характеристиках Eг = f(N) рис. 5.2 провести горизонталь, соответствующую Ег max, до точки пересечения с характеристикой Ip = 0 А. Опустить из этой точки вертикаль, до пересечения с осью абсцисс, которая и определит возможное количество позиций регулирования тормозного режима. Например, как это показано на рис. 5.2, при Ег max = 45 В без ограничения можно использовать лишь 11 позиций. Если же Ег max > 54 В, то можно использовать все 15 позиций.
Следует отметить, что максимальный ток возбуждения Iов max выбирается, в частности, из соображений отсутствия перегрева обмотки возбуждения при 40-минутном режиме ее работы [3]. Поэтому при более кратковременном режиме в нашем примере машинист мог бы использовать 12-ю и последующие позиции регулирования.
5.4.4. Ограничения по условиям коммутации
Как и в режиме тяги, в режиме рекуперативного торможения необходимо не допустить такого соотношения между током якоря и током возбуждения, которое привело бы к аварийному режиму по условиям коммутации.
Минимальное соотношение между Ip и Iов определяется из выражения [3]:
Ip |
= |
1 |
, |
(5.12) |
|
Ioвmin |
βmin |
||||
|
|
где βmin – см. задание.
Именно такое соотношение рассматривается как ограничение по коммутации для параллельного соединения (П) якорей тяговых двигателей.
При пониженном напряжении на коллекторе, что характерно для СП- и С- соединений, допускается соотношение, являющееся ограничением по коммутации для указанных соединений якорей двигателей:
Ip |
= 4 . |
(5.13) |
|
Ioвmin |
|||
|
|
Расчет ограничений В = f(V) и V = f(Ip) осуществляется в следующем порядке:
-задаются группировкой якорей, например, П-соединением, а значит и Ip/ Iовmin в соответствии с (5.12) или (5.13);
-задаются током якоря, например Ip = 200 A;
-по формуле (5.12) или (5.13) вычисляют Iовmin, А;
-по рис. 5.1, задав Iов min, определяют значение CvФ, B/км/ч;
-по формуле (5.6) с учетом (5.7) находят значение V, км/ч;
-по формуле (5.5) вычисляют В, кН;
-заданные и расчетные данные заносят в табл. 5.3;
-повторяют расчеты последовательно для Ip = 300 A, 400 А, 500 А, 600 А;
-повторяют расчета для СП- и С- соединений.
29
По данным табл. 5.3 на характеристики В = f(V) и V = f(Ip) наносятся ограничения по коммутации (см. рис. 5.3).
Таблица 5.3
Расчетные данные ограничений тормозного режима по коммутации
|
|
|
|
|
|
Соединение якорей двигателей |
|
|
|
|
|||||
Ip, А |
П (Ip / Iовmin = 1/βmin) |
|
|
СП (Ip / Iовmin = 4) |
|
|
С (Ip / Iовmin = 4) |
|
|||||||
Iовmin, |
CvФ, |
V, |
|
В, |
Iовmin, |
|
CvФ, |
V, |
|
В, |
Iовmin, |
CvФ, |
V, |
В, |
|
|
А |
B/(км/ч) |
км/ч |
|
кН |
А |
|
B/(км/ч) |
км/ч |
|
кН |
А |
B/(км/ч) |
км/ч |
кН |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
200 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
300 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
400 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
500 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
600 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
По данным табл. 5.3 на характеристики В = f(V) и V = f(Ip) наносятся ограничения по коммутации (см. рис. 5.3).
6.СОДЕРЖАНИЕ ПРОЕКТА, ПОРЯДОК РАСЧЕТА ПАРАМЕТРОВ
ИХАРАКТЕРИСТИК
Содержание проекта (работы) определяет преподаватель, причем оно может быть как сужено, так и расширено.
При многовариантных расчетах в тексте давать сначала примеры расчета, а результаты других аналогичных расчетов – в виде таблиц. Также поступать при использовании ЭВМ.
6.1.Мощностные и массогабаритные параметры
1)Скорость электровоза на расчетном подъеме. Определяется в соответствии с (2.3)
иисходными данными.
2)Сила тяги электровоза на расчетном подъеме. Определяется в соответствии с (2.2)
сучетом рис. 2.1 для Vp и исходными данными.
3)Мощность электровоза на расчетном подъеме. Определяется в соответствии с
(2.1) с учетом (2.2) и (2.3).
4)Мощность электровоза в номинальном режиме. Определяется в соответствии с
(2.4) и (2.1).
5)Номинальная мощность тягового двигателя и число осей электровоза. Выбираются в соответствии с (2.5) и соображений, изложенных в разделе 2. Выбрать тип электровоза-аналога (см. Приложение).
6)Масса электровоза. Определяется в соответствии с (2.6).
30