

3411
.pdfРеакции рессор можно определить из уравнения:
2 Пст – mнп g = 4R. |
(1.3) |
Порядок оформления
1)На расчетной схеме рамы тележки показать все действующие силы Pк, R, Pд.
2)Рассчитать значения mв,т.
3)Рассчитать силу статического нажатия от оси на рельсы 2Пст , кН.
1.3 Изменение нагрузок при работе тяговых двигателей
При работе тяговых двигателей силы тяги, реализуемые колесными парами, передаются через буксы на боковины рамы тележки. С боковин через центральную поперечную балку тяговое усилие передается на надрессорную балку – шкворневый брус рамы тележки (см. рисунок 1, поз. 13), а с него через шкворень – на шкворневую балку кузова вагона, рисунок1.2.
Уровень головок рельс |
V |
|
|
2Fтд |
Fтк1 |
Fтд |
Fтд |
|
zш |
|
zрт |
Fтд |
Fтд |
|
|
2Ro |
2Ro |
Рисунок 1.2 – Схема сил нажатия колесных пар на рельсы |
|
Величина силы тяги одной колесной пары – тягового двигателя, кН:
F |
Fк |
. |
(1.4) |
ТЭД |
4 |
|
Таким образом, на тележку действует активная пара сил, параллельных оси Х: в местах контакта колес с рельсами на уровне головок и в месте крепления шкворня и шкворневого бруса. Момент этих сил равен моменту сопротивления кузова:
Мт = Мк, т. е. 2Fтэд Zрт = Fтк1 Zш , |
(1.5) |
где Fтк1 – сила тяги на одну тележку вагона.
Но за счет разности высот точек приложения противодействующих сил 2Fтэд и Fтк1 возникает продольный опрокидывающий момент. При этом нагрузка каждого переднего колеса на рельс уменьшается, а каждого заднего колеса увеличивается на величину Rо.
11
Определить величину догрузки-разгрузки колес Rо |
можно, расписав уравнение |
опрокидывающего момента: |
|
Fтк1 ·(Zш – Zрт)= 2 Rо·2a . |
(1.6) |
Плечо суммарной силы тяги тележки 2Fтэд , приложенной сначала к ее боковинам и передающейся далее на шкворневый брус, Zрт определяется самостоятельно по заданным размерам в исходных данных.
Порядок оформления
1)Начертить схему сил нажатия колесных пар на рельсы.
2)Произвести расчет величины догрузки-разгрузки колес Rо, кН.
1.4 Опрокидывающий момент от действия центробежной силы
Направление движения экипажа в кривой изменяется под действием направляющей силы от рельсов. При этом возникает центростремительное ускорение
a |
V 2 |
|
ρ 3,62 . |
(1.7) |
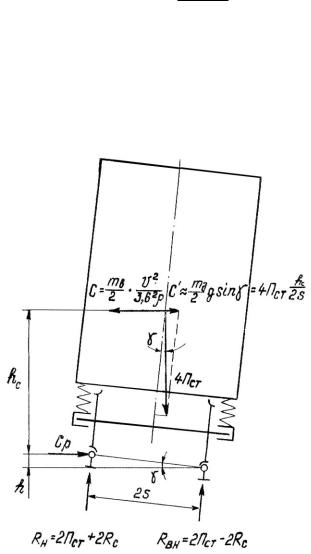
При движении экипажа в кривой на него действуют распределенные по всей массе центробежные силы, которые мы заменяем равнодействующей С, приложенной в центре масс и направленной в сторону наружного рельса, рисунок 1.3.
Рисунок 1.3 – Схема действия сил на экипаж при движении в кривой с возвышением
12
Величина центробежной силы в расчете на одну тележку равна
|
С |
m |
в |
|
|
|
V |
2 |
|
. |
(1.8) |
|||
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|||||||
|
|
|
2 |
|
|
|
ρ 3,62 |
|
||||||
При выполнении возвышения наружного рельса центробежная сила частично |
||||||||||||||
компенсируется составляющей силы тяжести: |
|
|
|
|
|
|
|
|
|
|
|
|
||
С |
mв |
g sin γ |
mв |
g |
|
h |
. |
(1.9) |
||||||
|
|
|
||||||||||||
2 |
|
|
|
|
|
2 |
|
|
2S |
|
||||
При этом такое же по величине значение центробежной силы в кривой с |
||||||||||||||
возвышением Св достигается при большей скорости движения: |
|
|||||||||||||
|
|
Св = С – С . |
(1.10) |
|||||||||||
Момент центробежной силы вызывает изменение опорной реакции: реакция от наружной рельсовой нити Rн увеличивается, а реакция от внутренней рельсовой нити Rвн уменьшается. В пределе при опрокидывании вагона Rвн будет равно нулю.
Опрокидывающий момент от силы Св:
|
Моп = Св hс , |
(1.11) |
|
где |
|
|
|
h |
0,5mк hк (mp 2mд ) hт 2mнп hнп |
, |
(1.12) |
|
|||
c |
0,5mв |
|
|
|
|
||
здесь 0,5mв – масса вагона в расчете на одну тележку;
hк, hт, hнп – высоты расположения центров масс кузова, подрессорных масс тележки и неподрессорных масс колесных пар над уровнем головок рельсов.
Считают, что безопасность движения обеспечивается, если опрокидывающий момент не превышает восстанавливающего момента от силы тяжести на плече S с коэффициентом запаса равным n = 2:
|
Моп max |
|
M восст |
, |
|
(1.13) |
|||||
|
|
|
|
||||||||
|
|
|
|
|
|
n |
|
|
|
|
|
где |
|
|
|
|
|
|
|
|
|
|
|
|
Мвосст |
mв |
g S. |
|
(1.14) |
||||||
|
2 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
||
Максимально допустимое по устойчивости от опрокидывания центростремительное |
|||||||||||
ускорение |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
|
h |
|
|
a |
|
g |
|
|
|
|
|
. |
(1.15) |
||
оп в |
|
|
|
|
|
||||||
|
|
|
2h |
|
|
2s |
|
||||
|
|
|
|
|
c |
|
|
|
|
||
|
|
13 |
|
|
|
|
|
|
|
|
|

В кривой без возвышения
aоп в g |
s |
(1.16) |
|
|
|||
2hc |
|||
|
|
Центробежная сила уравновешивается в опорных точках суммой поперечных реакций рельсов, составляющей с силой Св пару с плечом hс. Момент этой пары уравновешен моментом пары вертикальных реакций на правых и левых колесах тележки (см. рисунок 1.2).
Σ Мх = Св hC – 2Rсв 2S = 0. |
(1.17) |
Необходимо определить вертикальные реакции Rсв и Rс при действии центробежной силы в кривой с возвышением и без него.
Порядок оформления
1)Начертить схему действия сил на экипаж при движении в кривой с возвышением.
2)Рассчитать hк, hт, hнп , м, используя заданные значения Дб, hск, hст .
3)Рассчитать hс , м.
4)Рассчитать опрокидывающий момент от силы Св и восстанавливающий момент от силы тяжести.
5)Используя формулы (1.7), (1.14), (1.15) рассчитать допустимые по опрокидыванию скорости движения в кривой без возвышения Vоп и с возвышением Vоп.в , км/час.
6)Рассчитать опорные реакции Rсв и Rс , кН.
7)Вывод о безопасности – устойчивости движения экипажа по опрокидыванию.
1.5 Силы, действующие на тележку при движении в кривой
При входе в кривую на переднее наружное колесо со стороны наружного рельса начинает действовать направляющее усилие У1 , которое понуждает экипаж двигаться по окружности вокруг центра кривой 0. Экипаж, двигавшийся с линейной скоростью V, начинает вращаться вокруг точки 0 с угловой скоростью
ω = |
V |
, |
(1.18) |
3,6ρ |
где ρ – радиус вращения, т. е. перпендикуляр, опущенный из центра кривой на продольную ось экипажа. Основание перпендикуляра точка Ω является полюсом вращения, рисунок 1.4.
14
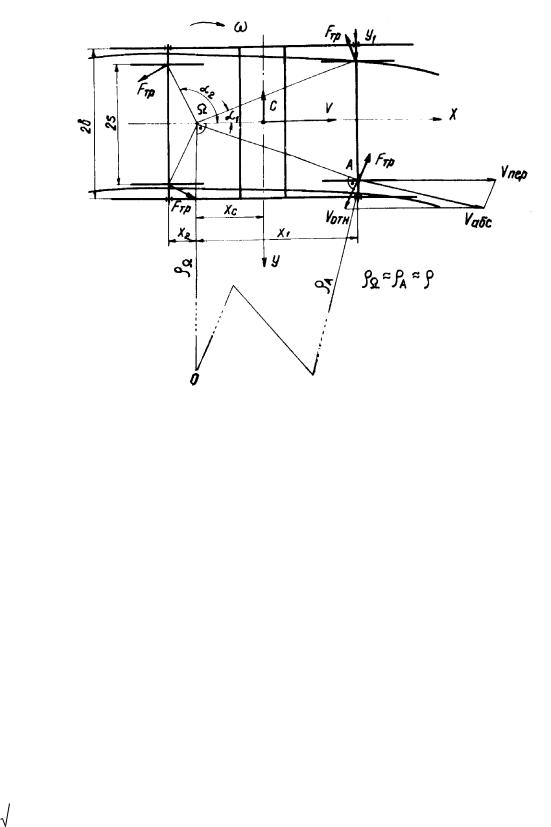
Рисунок 1.4 – Схема действия сил на тележку при движении в кривой
Абсолютная скорость Vабс любой точки тележки, в частности, центра переднего внутреннего колеса А, направлена перпендикулярно радиусу, проведенному из точки 0 в данную точку, и равна по величине
VабсА = ωА ρА . |
(1.19) |
Величины и направления абсолютных скоростей всех точек тележки будут различны. Для дальнейших рассуждений и расчетов удобно представить абсолютную скорость каждой точки как сумму переносной и относительной скоростей. Нам известна величина и направление скорости V в точке Ω. Тогда нам можно выразить абсолютную скорость точки А Vабс как векторную сумму переносной скорости VАпер = V в точке Ω и относительной скорости точки А во вращательном движении ее вокруг точки Ω.
|
|
VАотн = ω r , |
(1.20) |
где r = S 2 X 2 – радиус вращения точки А. |
|
||
|
A |
|
|
Все точки тележки, в том числе и центры колес, имеют переносную скорость, равную V. Тележка движется по рельсам, и перемещение ее вдоль продольной оси со скоростью V осуществляется за счет качения колес. Вторая составляющая абсолютной скорости – относительная скорость – по своему направлению не совпадает с плоскостью круга катания. А это означает, что движение колеса в этом направлении осуществляется за счет проскальзывания.
15

Таким образом, абсолютную скорость каждого колеса можно представить как векторную сумму скорости качения и скорости скольжения во вращательном движении вокруг точки Ω, называемой полюсом вращения. Качение колес не сопровождается заметным сопротивлением, в то время как проскальзывание колес по рельсам во вращательном движении тележки вокруг полюса Ω сопровождается действием сил трения Fтр в опорных точках колес, препятствующих проскальзыванию.
Задача о силах, действующих на тележку при движении в кривой, рассматривается с рядом упрощений. Так, коэффициенты трения под всеми колесами приняты одинаковыми и постоянными; учитывается только горизонтальная составляющая силы трения, определяемая вертикальной нагрузкой на колесо.
Направления и величины внешних сил, приложенных к тележке, определяют ее положение относительно рельсов. При невысоких скоростях и соответственно небольших значениях центробежной силы С действие момента сил трения может заставить тележку двигаться по кривой в положении наибольшего перекоса, т. е. задняя колесная пара касается гребнем колеса головки рельса внутренней нити. Полюс Ω максимально удален от центра тележки; полюсное расстояние хснп рассчитывают по формуле:
|
xснп |
ρ 10 |
3 |
|
|
|
|
|
, |
(1.21) |
|
|
2а |
|
|||
|
|
|
|
|
|
где ρ – заданный радиус кривой, м; |
|
|
|
|
|
– суммарный зазор для колесной пары в кривой заданного радиуса, мм; |
|
||||
для ρ ≥ 350 м |
= 1520 – 1506 = 14 мм; |
|
|||
для ρ = 349÷ 300 м |
= 1530 – 1506 = 24 мм; |
|
|||
для ρ ≤ 299 м |
= 1540 – 1506 = 34 мм. |
|
|||
Здесь 1506 мм – поперечный разрез колесной пары на уровне точки контакта гребня колеса с рельсом.
С ростом скорости (и величин сил С и У1) тележка будет стремиться к хордовой установке, т. е. задняя колесная пара, пройдя через промежуточные положения, при определенной скорости прижмется гребнем к наружному рельсу.
В этом случае полюс Ω окажется точно посередине экипажа, а полюсное расстояние хс = 0.
При промежуточной установке тележки (0 < хс < хснп) ее равновесие под действием рассмотренной системы сил выражается двумя уравнениями, а именно: уравнением суммы проекций всех сил на поперечную ось ΣУ = 0 и уравнением моментов относительно полюса, Σ МΩ = 0.
У |
1 |
С 2 fП |
СТ |
cosα |
1 |
2 fП |
СТ |
cosα |
2 |
0 |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
(1.22) |
||||||
У |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
х Сх |
|
2 fП |
|
|
х 2 |
S 2 |
2 fП |
|
х 2 |
S 2 |
|||||||
1 |
с |
СТ |
|
СТ |
0, |
|||||||||||||
|
1 |
|
|
|
|
1 |
|
|
|
|
|
2 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
16 |
|
|
|
|
|
|
|
|

где У1 – направляющее усилие первой по ходу колесной пары, кН; С – расчетное значение центробежной силы для массы электровоза, приходящейся на
тележку, кН;
f = 0,25 – коэффициент трения между колесом и рельсом; fПСТ cosα – проекция силы трения на ось Y;
х1, х2 – расстояния от полюса поворота до осей колесных пар, м;
fПст 
 хi2 S 2 – момент силы трения относительно полюса поворота, кН; считается положительным при направлении по ходу часовой стрелки;
хi2 S 2 – момент силы трения относительно полюса поворота, кН; считается положительным при направлении по ходу часовой стрелки;
S = 0,8м – половина расчетного расстояния между кругами катания колес.
При упоре задней колесной пары в рельсы система сил дополняется направляющей силой У2. Чаще всего при движении в кривой тележка занимает промежуточное положение.
Два уравнения ΣУ = 0 и ΣМΩ = 0 содержат три неизвестных: направляющее усилие У1 (У1в), центробежную силу С (Св) и в неявном виде абсциссу полюса вращения хс.
Для решения системы заранее задаются рядом значений одного из неизвестных, а значения двух других определяются из уравнений.
Решение системы уравнений удобно выполнить в форме таблицы 1.1 при заданных положениях тележки. Система решается относительно неизвестных У1 и С .
При определившейся величине С легко находится значение скорости движения в кривой заданного радиуса. При наличии заданного возвышения h:
|
|
|
m |
в |
|
V 2 |
|
|
gh |
|
||
Св С С |
|
|
|
|
|
|
|
|
|
|
(1.23) |
|
|
|
|
|
|
|
|||||||
|
2 |
|
3,6 |
2 |
|
|
. |
|||||
|
|
|
|
|
ρ |
2S |
|
|||||
Из этого выражения определяется скорость движения в кривой с возвышением
|
|
c |
|
h |
|
|
V 7,95 |
ρ |
|
|
|
. |
(1.24) |
2ПСТ |
|
|||||
в |
|
|
S |
|
||
|
|
|
|
|
|
|
Порядок оформления
1)Начертить схему действия сил на тележку при движении в кривой.
2)Записать систему уравнений равновесия сил, действующих на тележку в кривой(1.21).
3)Рассчитать xснп , м и подготовить таблицу 1.1.
4)Рассчитать У1, С, кН; V, Vв, км/ч.
5)Построить графики зависимостей У1(V), хс(V), С(V) отдельно для движения в кривой с возвышением и без возвышения.
17
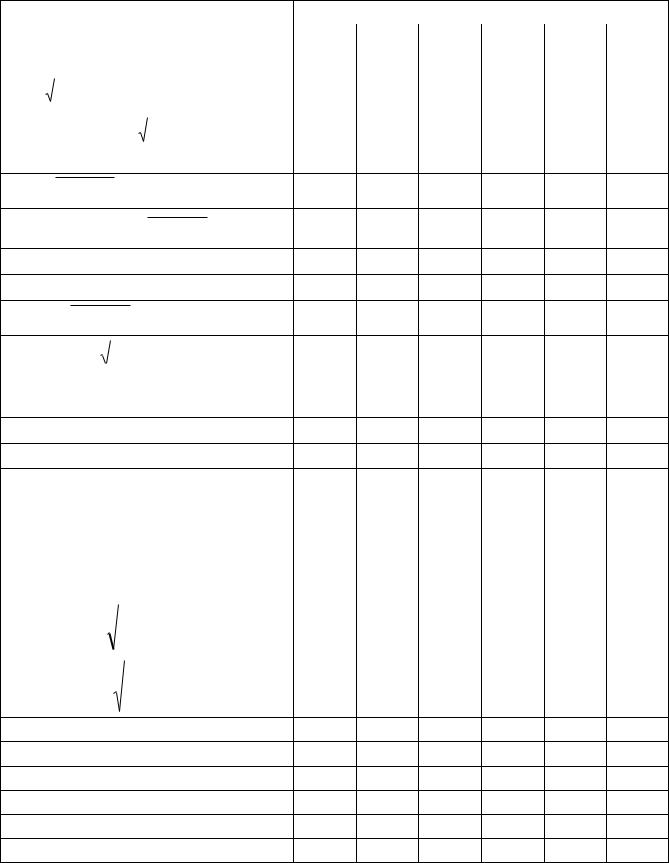
Таблица 1.1 – Решение системы уравнений
|
|
Расчетная величина, ед. изм. |
Значения для заданного хс |
|
||||||
хс |
|
|
0 |
0,8 |
1,3 |
1,6 |
1,8 |
хснп |
||
|
|
|
|
|
|
|
|
|
|
|
х1 |
= хс + а |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
x 2 S 2 |
|
|
|
|
|
|
|
||
|
|
1 |
|
|
|
|
|
|
|
|
cos 1 = x1 / |
|
|
|
|
|
|
|
|||
x12 S 2 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
||
х2 |
= хс – а |
|
|
|
|
|
|
|
||

 x22 S 2
x22 S 2
cos 2 = x2 / 
 x22 S 2
x22 S 2
cos I = cos 1 + cos 2 хс cos i

 xi2 S 2
xi2 S 2
|
|
|
|
|
|
A2 = |
xi2 S 2 – хс cos i |
||||
У |
2 f ПСТ |
А |
|
||
|
2 |
||||
1 |
|
а |
|||
|
|
||||
2fПСТ cos i
С= У1 – 2fПСТ cos i
Св С С '
Rс |
C hс |
|
|
|
|
|
|
|
|
|
||||
2 |
2S |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
||||||
Rсв |
Cв hс |
|
|
|
|
|
|
|
|
|||||
|
2 2S |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V 7,95 |
ρ |
|
С |
|
|
|
|
|||||||
|
|
|
|
|
|
|
||||||||
2ПСТ |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С |
|
h |
||||
Vв 7,95 |
|
|
ρ |
|
|
|
|
|
|
|||||
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
2ПСТ |
|
S |
|||||
FyТР1
FyТР1 В
Убок.
Убок. в
а
ав
Примечание: если с ростом величины хс величина С принимает отрицательные значения, то расчеты скоростей V и VВ для таких хс не производятся и в таблице 1.1 ставится прочерк.
18
1.6 Боковое усилие между колесом и рельсом в кривой
Как показали расчеты пункта 1.5, вертикальные нагрузки от колес на рельсы при движении в кривой изменяются.
Нагрузка П на направляющем колесе составит
П = ПСТ + Rс – Ro. |
(1.25) |
Соответственно должны изменяться и силы трения. Поэтому в качестве первого приближения к реальной картине можно считать проекцию силы трения на переднем наружном колесе на ось Y
Y |
= f П cos α1. |
(1.26) |
F ТР1 |
|
Тогда суммарное боковое воздействие между рельсом и передним направляющим колесом
Y |
(1.27) |
Убок = У1 – F ТР1. |
|
Порядок оформления
1)Расчет FYТР1, кН для случаев движения в кривой с возвышением и без него, для заданных в таблице 1.1 значений хс.
2)Расчет Убок , кН для тех же случаев.
3)Занести значения Убок и Убок.в для заданных значений в таблицу 1.1. Построить графики Убок.В (V), Убок (V).
1.7 Оценка безопасности движения экипажа в кривой по величине боковой силы
Безопасность движения в кривой определяется дополнительной системой сил, действующих на экипаж. Особое значение имеет поперечное усилие, действующее между набегающим колесом и рельсом.
Если поперечное усилие достаточно велико, то колесо контактирует с рельсом в точке на поверхности гребня у его основания. При одноточечном контакте картина сил представляется в соответствии с рисуноком 1.5. В точке контакта возникает нормальная реакция N. Горизонтальная составляющая этой силы NY направляет движение колесной пары в кривой, а вертикальная составляющая NZ заставляет колесо перемещаться вверх по рельсу.
Под действием вертикальной нагрузки П колесо соскальзывает вниз. Но вследствие прижатия колеса к рельсу силой N в точке контакта действует сила трения, препятствующая этому движению
Т = Nf. |
(1.28) |
19

Рисунок 1.5 – Схема действия сил в точке контакта колеса и рельса
Вкатывание колеса на рельс будет невозможно, если сумма вертикальных составляющих NZ и ТZ сил N и Т в точке контакта не превысит силу П, прижимающую колесо к рельсу.
Для того чтобы обеспечить невозможность вползания колеса на рельс, вводят коэффициент запаса устойчивости движения экипажа η = 1,5; т. е. допустимое значение суммы выталкивающих сил снижают по сравнению о вертикальной нагрузкой П в 1,5 раза.
Тогда условие безопасности движения по устойчивости против схода с рельсов
запишется как |
|
|
|
|
|
|
|
NZ + ТZ ≤ |
|
|
П |
|
≈ 0,67 П . |
(1.29) |
|
1,5 |
|
||||||
|
|
|
|
||||
Величину суммы NZ + ТZ можно найти через горизонтальные составляющие сил из |
|||||||
уравнения проекций сил в точке контакта |
|
|
|
|
|
|
|
N Z NY |
1 |
|
; |
(1.30) |
|||
|
|
|
|||||
|
tgβ |
||||||
|
|
|
|
|
|
||
ТZ = Т sin β = N f sin β = NY f, |
(1.31) |
||||||
здесь β – угол наклона гребня в точке контакта.
Сумма сил NY и ТY представляет собой боковое воздействие рельса на колесо
|
Убок = NY – ТY . |
|
|
(1.32) |
|||||
Выразив ТY через NY, |
|
|
|
|
|
|
|
|
|
Т Y |
Т cos β N f cos β |
NY |
|
f cos β |
NY |
f |
(1.33) |
||
sin β |
tg β |
||||||||
|
|
|
|
||||||
определим NY через Убок |
|
|
|
|
|
|
|
|
|
|
Убок = NY – NY |
f |
; |
|
|
|
|||
|
|
|
|
|
|||||
|
tg β |
|
|
|
|||||
|
N y |
У бок |
|
|
|
(1.34) |
|||
|
|
|
|
|
|
||||
1 f tg β
20