

Лекция 11
Оптимальные приемники
Рассмотрим систему сигналов с активной паузой. Сигналы показаны на рис. 1 и применяются в сетевых интерфейсах систем связи ИКМ, в компьютерном стыке с внешними устройствами RS-232 (или С2).
a
S1 0
T t


S0
–a

Рис.1 Сигналы с активной паузой.
Обратимся к основному неравенству:
![]() .
.
Так как энергии
сигналов равны
![]() ,
,![]() ,то
условие выбора
,то
условие выбора
![]() .
(1)
.
(1)
Это означает что
решение принимаем в пользу сигнала,
взаимная корреляция которого с принятым
больше. Так как
![]() ,
,
![]() то
из (1) получим
то
из (1) получим
![]() .
(2)
.
(2)
множитель 2а можно исключить из неравенства, так как он всегда больше нуля и
![]() .
(3)
.
(3)
функциональная схема отвечающая этому условию показана нп рис. 2.
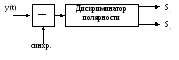
Рис. 2. Функциональная схема приемника.
Его возможная реализация показана на рис. 3. Здесь роль интегратора выполняет RC цепь, транзистор выполняет функции ключа, который разряжает емкость перед началом следующего сигнала. Дискриминатор полярности выполнен на операционном усилителе.
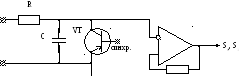
Рис.3. Возможная принципиальная схема оптимального
приемника.
Рассмотрим модулированные сигналы. На рис. 4 показан вид АМ сигнала.
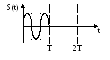
Рис. 4. Амплитудно-модулированный сигнал.
Для этого сигнала
![]() ;
;
![]() ;
;
![]()
![]() .
Средняя мощность сигнала
.
Средняя мощность сигнала
![]() и поэтому
и поэтому
![]() .
Тогда основное правило выбора будет
.
Тогда основное правило выбора будет
![]() (4)
(4)
или
![]() ,
,
![]() .
(5)
.
(5)
Структурная схема приемника показана на рис. 5.
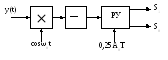
Рис. 5. Приемник АМ сигналов.
В его состав входит
интересное устройство вычисляющее
скалярное произведение принимаемого
и опорного сигналов; это перемножитель
и интегратор. В частотной области
интегратор это фильтр низких частот
При приеме гармонических сигналов это
устройство называется синхронным
детектором. Убедимся в том, такая
обработка повышает отношение сигнал/помеха.
Как и прежде
![]() .
Поэтому при обработке получим
.
Поэтому при обработке получим
![]() .
(6)
.
(6)
В результате
вычисления первого интеграла, так как
![]() ,
имеем
,
имеем
 .
(7)
.
(7)
Это полезный сигнал. Теперь о помехе. В приемнике гармонического сигнала обычно перед обработкой ставят дополнительный узкополосный фильтр, который пропускает сигнал (рис.6).
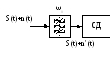
Рис. 6. Место узкополосного фильтра.
Он же пропускает и помеху, после чего она становится узкополосной. Известно, что узкополосный случайный сигнал (помеху) аналитически можно записать в виде синфазной и квадратурной составляющих,
![]() .
(8)
.
(8)
При обработке второго интеграла в (6) имеем
 .
(9)
.
(9)
Разложив произведение синуса и косинуса по известным формулам тригонометрии, получим значение интеграла равное нулю. Таким образом квадратурная составляющая помехи будет отсутствовать, что и повышает соотношение сигнал/помеха.
Рассмотрим систему частотно модулированных сигналов, их вид показан на рис. 7.
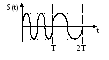
Рис. 7. Вид ЧМ сигнала.
Энергии таких
сигналов равны,
![]() и поэтому критерий выбора сводится к
сравнению скалярных произведений:
и поэтому критерий выбора сводится к
сравнению скалярных произведений:
![]() .
(10)
.
(10)
Этому алгоритму соответствует схема на рис. 8.

Рис.8. схема оптимального приемника ЧМ сигналов.
В последних вариантах мы рассмотрели оптимальные приемники гармонических сигналов и теперь отметим их интересную особенность.
Во первых для вычисления взаимной корреляции в приемнике должна быть точная копия передаваемого сигнала (опорный сигнал), содержащая сведения о его амплитуде, частоте и фазе (A0, φ0, ω0). Такой метод приема называется когерентным.
Во вторых выполнить это требование практически невозможно. Современные высокостабильные опорные генераторы имеют стабильность частоты 10-12 и представляют собой довольно сложные устройства. Однако даже при такой стабильности заметный уход фазы будет наблюдаться уже через несколько часов. Помимо этого будут изменяться параметры среды передачи (кабеля связи, радиолинии) что невозможно учесть точными аналитическими методами. А раз так, то невозможно ввести коррекцию и в опорный сигнал. Из этого следует вывод о том, что реализовать оптимальный приемник практически невозможно и можно только говорить о степени приближения к нему тех или иных технических решений. Одним из таких решений является некогерентный метод приема с использованием оптимальных фильтров.
Некогерентный метод приема.
Некогерентный
способ приема это прием при неопределенной
фазе входного сигнала. Имеется ввиду
полезная составляющая сигнала на входе
приемника
![]() ,
,
![]() .
В этом случае функция правдоподобия,
лежащая в основе выбора будет случайна,
так как случайна фаза. Запишем ее для
сигнала Si
:
.
В этом случае функция правдоподобия,
лежащая в основе выбора будет случайна,
так как случайна фаза. Запишем ее для
сигнала Si
:
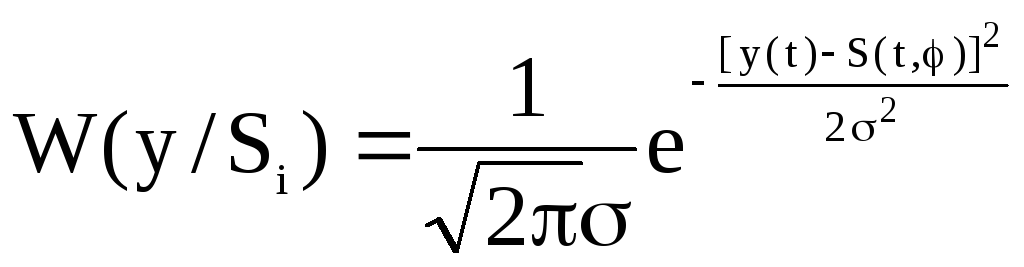 .
(11)
.
(11)
Поступим с ней так как положено при статистическом подходе –усредним , задав закон распределения фазы W() . Тогда
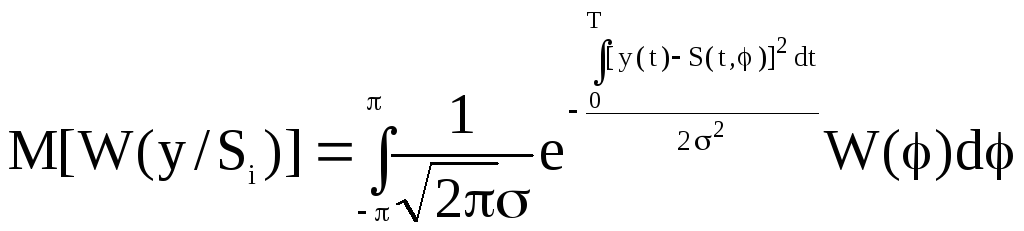 .
(12)
.
(12)
Если применить критерий максимального правдоподобия, то при выборе следует теперь сравнить математические ожидания функций правдоподобия:
![]() .
(13)
.
(13)
Математический анализ этого выражения, показал что сравнение функций правдоподобия можно заменить сравнением модулей функций взаимной корреляции переданного и принятого сигналов:
![]() . (14)
. (14)
Если приемник
принимает решение по этому неравенству,
то его называют некогерентным приемником.
Составим его схему, для чего разберем
смысл модулей. Интеграл
![]() по смыслу есть выходной сигнал на выходе
фильтра с характеристикой согласованной
с передаваемым сигналом при условии
что на входе присутствует принимаемый
сигнал y(t). Это реакция
согласованного фильтра (рис.9).
по смыслу есть выходной сигнал на выходе
фильтра с характеристикой согласованной
с передаваемым сигналом при условии
что на входе присутствует принимаемый
сигнал y(t). Это реакция
согласованного фильтра (рис.9).

Рис. 9. Согласованный фильтр.
Для получения модуля, огибающей z(t), достаточно подать сигнал на обычный амплитудный детектор, схема которого приведена на рис. 10.

Рис. 10. Амплитудный детектор для получения модуля.
Таким образом схема оптимального некогерентного приемника на оптимальных фильтрах имеет вид показанный на рис. 11. При частотной модуляции фильтры должны иметь полосы пропускания в области несущих частот f0 и f1 . Особенность его в том, что не требуется иметь опорный источник, следовательно знание фазы принимаемого сигнала необязательно.
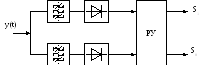
Рис. 11. Схема оптимального приемника некогерентного типа.
Из вышеизложенного следует, что схема оптимального приемника зависит от того какая система сигналов принята для передачи информации. Возникает законный вопрос, какие сигналы следует использовать. При выборе необходимо руководствоваться по крайней мере двумя требованиями: помехоустойчивостью и различимостью. Остановимся на этом подробнее.
Наборы сигналов.
Под набором будем иметь ввиду то множество сигналов, с помощью которого передается информация.
Оптимальный набор сигналов должен обеспечивать большую помехозащищенность.
Разберем как создаются наборы. Допустим имеется множество функций i(t), обладающих свойством ортогональности:
![]() , (15)
, (15)
Тогда любой сигнал для передачи ai сообщения формируется по следующему правилу:
![]() .
(16)
.
(16)
Аппаратное решение задачи формирования сигналов показано на рис. 12 .
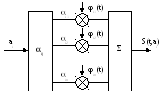
Рис. 12. Принцип формирования сигналов.
Пользуясь понятием векторного пространства сигнала можно считать что коэффициенты ij координаты вектора. Тогда задача приема во общем-то сводится к их определению. Концы векторов сигналов должны быть как можно дальше друг от друга. Допустим в канале связи отсутствуют помехи, y(t)=S(t,ai). Произведем обработку сигнала по следующему принципу, умножим сигнал на ортогональную функцию и проинтегрируем:
![]() .
(17)
.
(17)
Поменяем местами интегрирование и суммирование и вспомним свойство ортогональности:
![]() .
(18)
.
(18)
Таким образом можно вычислить коэффициенты сигнала.
Функциональная схема для этого приведена на рис. 13.
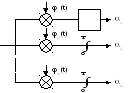
Рис. 13. Вычисление координат сигнала.
Далее предположим что в канале есть помехи n(t). Тогда y(t)=S(t,ai)+n(t) и, произведя те же операции, получим следующий результат:
![]() .
(18)
.
(18)
Первый интеграл это коэффициенты вектора сигнала ik, а второй – погрешность их определения. Оптимальный набор сигналов должен давать минимальную погрешность. Для этого коэффициенты ik должны быть такими, чтобы концы векторов были максимально удалены друг от друга (рис. 14).

Рис. 14. Векторное представление набора.
Рассмотрим двоичный
канал связи; его сигналы запишем в
следующем виде:
![]() ,
,
![]() .
Или
.
Или
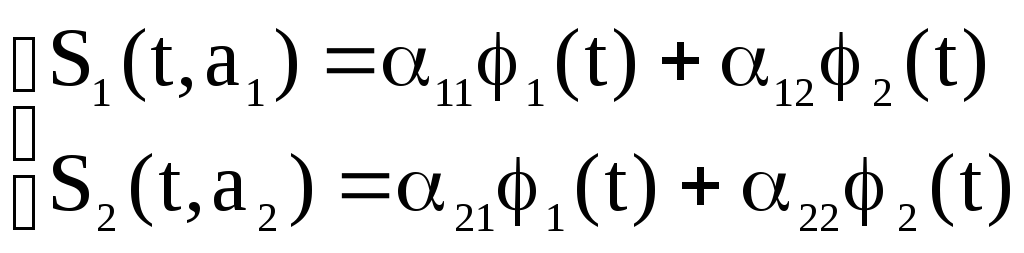 .
(19)
.
(19)
Для передачи сообщений чаще всего применяются модулированные сигналы. При гармонической модуляции имеем:
![]() ;
; ![]() ;
; ![]() .
.
Далее рассмотрим
различные ее виды. При амплитудной
модуляции
![]() ,
,
![]() и
и
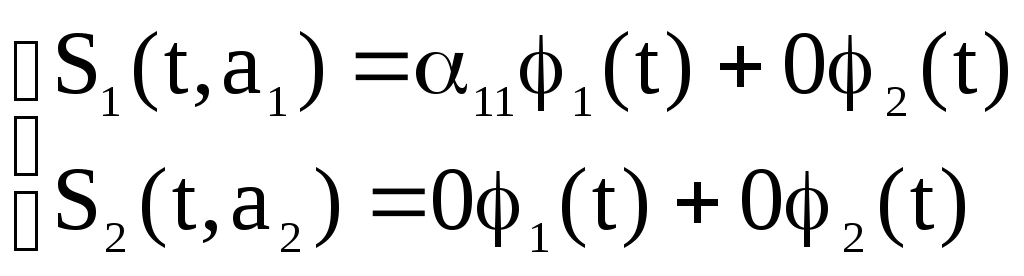 .
.
Коэффициенты и вектора сигналов показаны на рис. 15
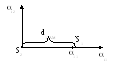
Рис. 15. Векторное представление АМ сигналов.
При частотной
модуляции (ЧМ)
![]() ;
; ![]() ;
; ![]() ;
; ![]() и
и
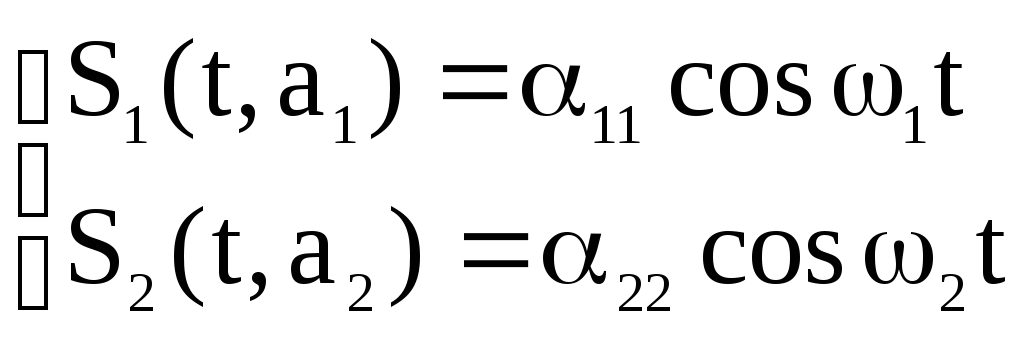 или
или
 .
.
Такие сигналы получили название ортогональных и их векторное положение показано на рис. 16.
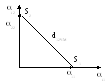
Рис. 16. Ортогональные сигналы.
И, наконец,
фазомодулированные сигналы (ФМ), это
система противоположных сигналов:
![]() ;
; ![]() ;
; ![]() ;
; ![]() и
и
 .
.
Векторное представление показано на рис. 17.
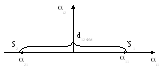
Рис. 17. Система противоположных сигналов.
Обратим внимание
на норму разности d12
. Из анализа следует
![]() и можно сделать следующий вывод.
Наибольшей помехоустойчивостью
обладают системы сигналов с ФМ, наихудшей
– АМ. Система фазомодулированных
сигналов является оптимальной.
и можно сделать следующий вывод.
Наибольшей помехоустойчивостью
обладают системы сигналов с ФМ, наихудшей
– АМ. Система фазомодулированных
сигналов является оптимальной.
Однако ранее уже отмечались трудности реализации приемника таких сигналов. Остановимся на данной теме подробнее.