TMM_MATERIALY_DLYa_STUDENTOV_2015-vesna / РГР и КУРСОВАЯ РАБОТА / Пример кинем. расчёта зубч. м-ма
.doc4 синтез и кинематический анализ зубчатого механизма
(Пример раздела 4 курсовой работы)
4.1 ИСХОДНЫЕ ДАННЫЕ
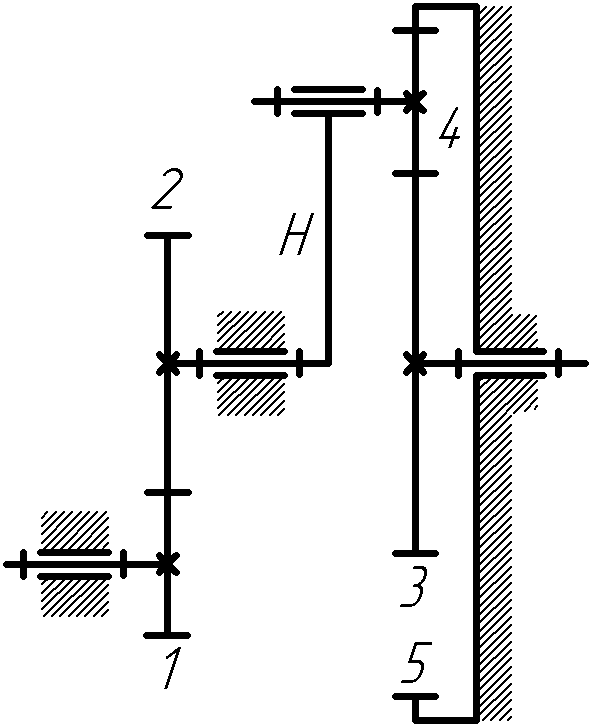
4.1.1 Кинематическая схема механизма
|
Рисунок 4.1 – Кинематическая схема механизма |
z1 = 20; z2 = 40; z3 – ?; z4 = 30; z5 = 120.
|
4.1.2 Величина угловой скорости выходного вала ωк = 20 рад/с (по п. 2.1.3).
4.1.3 Направление вращения выходного вала – по часовой стрелке (по п. 2.2.4).
4.2 определение числа зубьев колеса 3
4.2.1 Вычисляем подвижность рассматриваемого механизма
![]()
где n = 4 – число подвижных звеньев; pz = 3 – количество зубчатых зацеплений.
W = 4 – 3 = 1.
В механизме одно входное звено, и для него может быть вычислено передаточное отношение.
4.2.2 Устанавливаем, что механизм состоит из двух ступеней: обычной (колёса 1 и 2), а также планетарной (колёса 3, 4, 5 и водило Н).
4.2.3 Условие соосности для планетарной части
![]()
4.2.4 Неизвестное число зубьев колеса 3
z3 = z5 – 2z4 = 120 – 2∙30 = 60.
4.3 кинематический расчёт механизма аналитическим методом
4.3.1 Вычисляем передаточное отношение механизма
![]() (4.1)
где
(4.1)
где
![]() –
передаточное отношение обычной ступени.
–
передаточное отношение обычной ступени.
![]() (4.2)
(4.2)
![]() –
передаточное
отношение планетарной ступени. Его
находим с использованием формулы Виллиса
–
передаточное
отношение планетарной ступени. Его
находим с использованием формулы Виллиса
 (4.3)
(4.3)
Подставляем (4.2) и (4.3) в (4.1)
![]()
4.3.2 Поскольку
![]() .
Так как рассматриваемый механизм
выполняет функцию редуктора,
предназначенного для уменьшения угловой
скорости вала двигателя до требуемой
угловой скорости кривошипа рычажного
механизма, вал первого колеса является
выходным, а вал колеса 3 – входным.
.
Так как рассматриваемый механизм
выполняет функцию редуктора,
предназначенного для уменьшения угловой
скорости вала двигателя до требуемой
угловой скорости кривошипа рычажного
механизма, вал первого колеса является
выходным, а вал колеса 3 – входным.
Поэтому![]() рад/с
(по п.4.1.2).
рад/с
(по п.4.1.2).
4.3.3 Угловая скорость входного вала, вычисленная аналитически
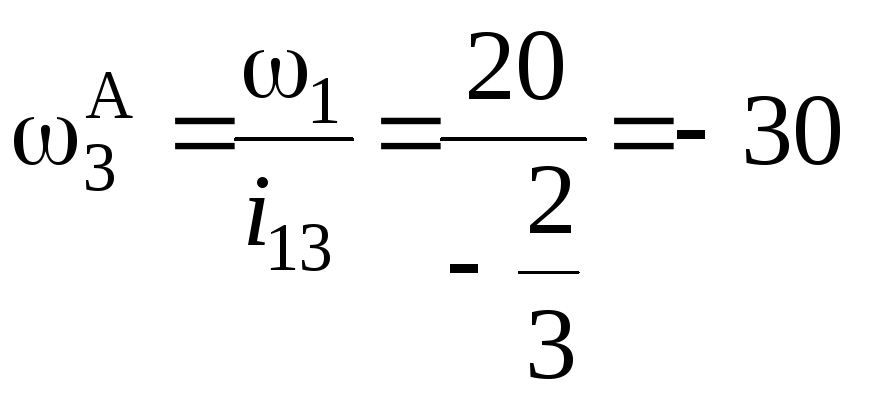 рад/с.
рад/с.
Знак минус означает, что ω3 направлена в сторону, противоположную ω1, то есть против часовой стрелки.
4.3.4 Для вычисления угловой скорости сателлита 4 используем метод инверсии.
Угловая скорость водила
![]() рад/с.
рад/с.
Угловые скорости центральных колёс при остановленном водиле:
![]() рад/с;
рад/с;
![]() рад/с.
рад/с.
Передаточные отношения от сателлита к центральным колёсам при остановленном водиле:
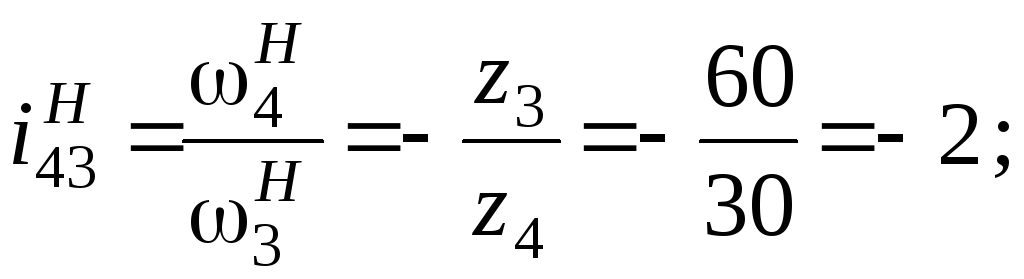
Угловая скорость сателлита относительно водила:
![]() (4.4)
(4.4)
![]() (4.5)
(4.5)
Результаты по формулам (4.4) и (4.5) сошлись. По-видимому, расчёт планетарной ступени выполнен правильно.
Абсолютная угловая скорость сателлита
![]()
4.4 кинематический расчёт механизма графическим методом
4.4.1 Предположив для упрощения расчётов, что модуль зубьев колёс m = 1 мм, вычисляем радиусы делительных окружностей:
![]()
![]()
![]()
![]()
![]()
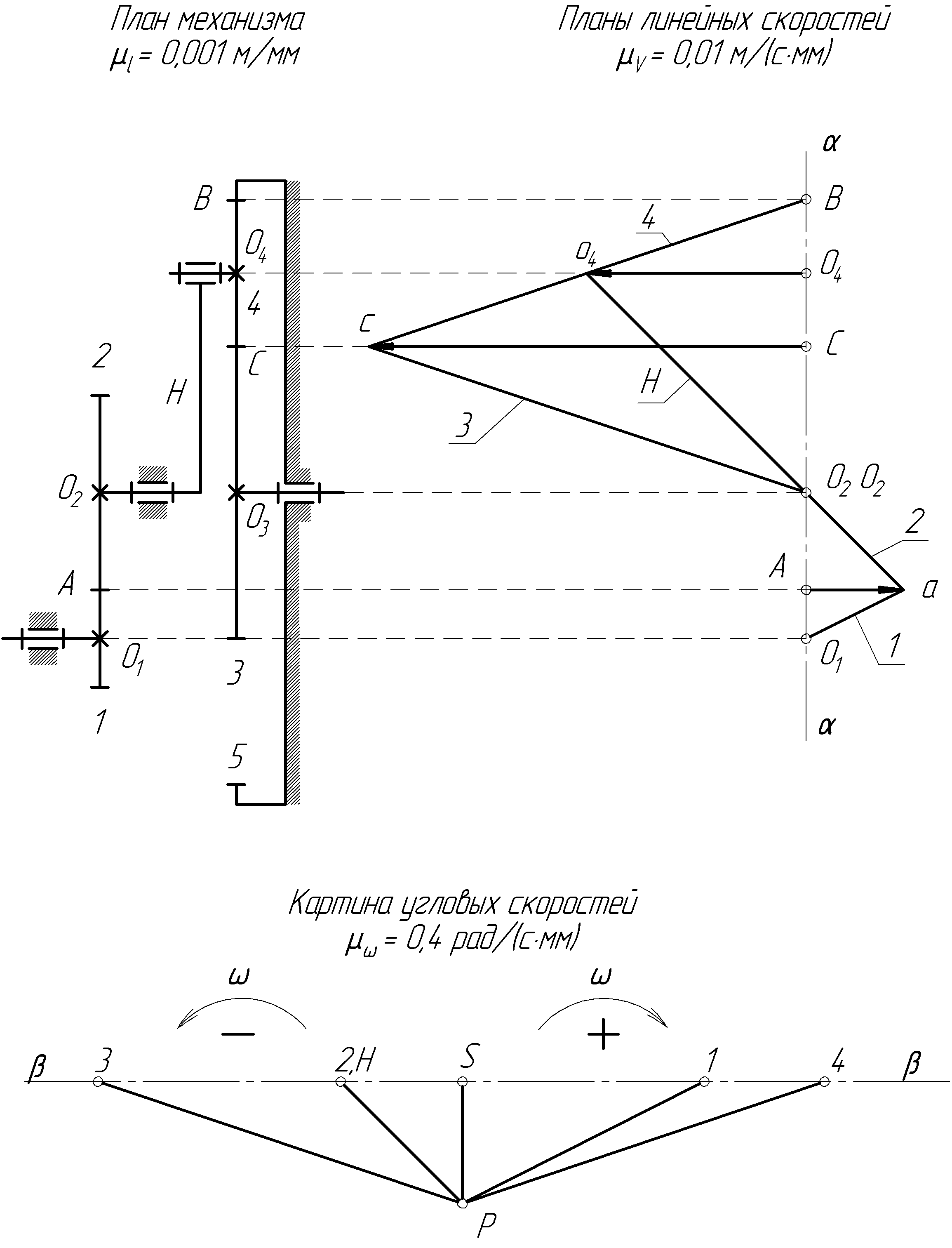
4.4.2 Принимаем масштаб длины μl = 0,001 м/мм и вычерчиваем план механизма. Радиусы колёс на плане вычисляем по формуле
![]()
Например, для колеса 1
![]()
![]()
4.4.3 Обозначаем на плане центры колёс: О1, О2, О3, О4, О5, а также точки их контакта: А, В и С.
4.4.4 Проводим вспомогательную прямую α – α перпендикулярную осям вращения колёс и проецируем на неё точки, перечисленные в п. 4.4.3.
4.4.5 Вычисляем скорость точки А
![]()
4.4.6 Принимаем
масштаб скорости на планах линейных
скоростей
μV
= 0,01 м/(с∙мм) и откладываем вектор
![]() длиной
длиной
![]()
4.4.7 Строим планы
скоростей звеньев в следующей
последовательности:
– через точки
![]() и а
проводим прямую 1;
– через точки а
и
и а
проводим прямую 1;
– через точки а
и
![]() проводим прямую 2(Н)
до точки о4;
–
через точки о4
и В'
проводим прямую 4 до точки с;
–
через точки с
и
проводим прямую 2(Н)
до точки о4;
–
через точки о4
и В'
проводим прямую 4 до точки с;
–
через точки с
и
![]() проводим прямую 3.
проводим прямую 3.
4.4.8 Строим картину угловых скоростей:
– проводим вспомогательную прямую β – β, параллельную осям вращения ко лёс, и отмечаем на ней произвольную точку S;
– принимаем масштаб угловых скоростей μω = 0,4 рад/(с∙мм) и вычисляем полюсное расстояние
![]()
– из полюса Р проводим прямые, параллельные прямым: 1, 2(Н),3 и 4; – наносим на прямую β – β соответствующие точки.
4.4.9 Находим по картине угловые скорости колёс:
![]()
![]()
![]()
![]()
4.4 сопоставление результатов
Вычисляем относительные погрешности определения угловых скоростей аналитически и графическим методами.




графическая часть кинематического расчёта