

UMF-BOOK
.pdfГлава 1
Вводные понятия дифференциальных уравнений в частных производных и краевых задач
§ 1. Понятие дифференциального уравнения в частных производных
Рассмотрим область D Rn, где Rn n–мерное евклидово простаранство, n ≥ 2.
Пусть точка x D и |
x1, x2, . . . , xn ee декартовые прямоугольные координаты, x = |
||||||||||||
(x1, . . . , xn). Пусть F (x, . . . , pi1...in , . . . ) – заданная вещественная |
функция точек x |
|
D и |
||||||||||
|
n |
|
|
|
|||||||||
вещественных переменных pi1...in , где ij – целые, неотрицательные, |
Pj=1 |
ij = k, k = 0, m, |
|||||||||||
m ≥ 1 и по крайней мере одна из частных производных |
|
|
|
|
|
||||||||
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
∂F |
|
|
X |
|
|
|
|
|
|
|
|
|
|
∂pi1...in |
6= 0, |
|
ij = m. |
|
|
|
|
|
|
||
|
|
|
|
|
j=1 |
|
|
|
|
|
|
|
|
Определение 1. |
Равенство вида |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
∂ku |
|
|
|
|
(1.1) |
|||
|
F x, . . . , |
|
|
, . . . = 0, |
|
|
|
||||||
|
|
|
|
|
|||||||||
|
|
|
∂x1i1 . . . ∂xnin |
|
|
|
|
|
|
|
|||
называется дифференциальным уравнением в частных производных порядка m относительно непрерывной функции u(x), u(x1, x2, . . . , xn), а левая его часть – диф-
ференциальным оператором или дифференциальным выражением в частных производных порядка m.
Определение 2. Вещественная функция u(x), определенная в D, непрерывная вместе со своими частными производными порядка m (u C(m)(D)) и обращающая (1.1)
в верное тождество, называется регулярным решением.
Определение 3. Решение, теряющее свойство регулярности в изолированных точках, линиях, поверхностях или многообразиях особого рода называется элементарным, или фундаментальным.
1

М.А. Греков Уравнения математической физики
Дифференциальные уравнения, отражающие реальные физические процессы, как правило имеют множество решений. В некоторых случаях множества решений весьма
узки или даже пусты. В частности, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
n |
|
∂u |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i=1 |
∂xi |
= 0 u(x) = const |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
X |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
∂u |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i=1 |
∂xi |
+ 1 = 0 вещественных решений нет. |
|
|
|
|
|
|
||||||||||
|
|
X |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Определение 4. |
Дифференциальное уравнение (1.1) линейно, если функция F |
|||||||||||||||||||
– линейная функция относительно всех переменных p |
|
|
, |
n |
i |
|
|
|
||||||||||||
i1 |
...in |
= k, k = 0, m. Если |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
j=1 |
j |
|
|
|
n |
|
|
|
||
функция |
F |
линейна только относительно старших производных p |
i1...in |
, |
|
i |
j = |
m, |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
P |
|
|
P |
j=1 |
|
|
|||
то (1.1) – квазилинейное уравнение. |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Линейное уравнение будем обозначать |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
L u = f, |
|
|
|
|
|
|
|
|
|
|
(1.2) |
|
где L – линейный дифференциальный оператор. Если f ≡ 0, x D, то (1.2) – однородное, а если f 6≡0, то (1.2) – неоднородное.
Если u(x), v(x) – решения неоднородного уравнения (1.2), то w = u − v – решение
|
|
|
|
|
|
|
|
|
|
уравнения Lw = 0. Кроме того, если uk – решение уравнения L uk |
= 0, k = 1, l, |
||||||||
|
P |
|
|
|
|
|
|
|
|
то u = |
l |
|
|
|
|
|
– вещественные |
||
k=1 Ckuk(x) будет удовлетворять уравнению L u = 0, где Ck |
|||||||||
постоянные. |
|
|
|
|
|
|
|
|
|
Рассмотрим линейное дифференциальное уравнение в частных производных вто- |
|||||||||
рого порядка. Его общий вид: |
|
|
|
|
|
|
|
||
|
n |
|
|
n |
|
|
|
|
|
|
X |
∂2u |
|
X |
∂u |
(1.3) |
|||
|
Ajk(x) |
|
+ |
Bj(x) |
|
+ C(x)u = f(x), |
|||
|
∂xj ∂xk |
∂xj |
|||||||
|
j,k=1 |
|
|
j=1 |
|
|
|
|
|
где Ajk, Bj , C, f - заданные в D вещественные функции точки x. Причем, не существует
такой точки x, в которой все Ajk = 0, иначе (1.3) выродилось бы в этой точке в диффе-
P
ренциальное уравнение в частных производных первого порядка. В дальнейшем знак часто будем опускать, считая, что по повторяющимся греческим индексам производится суммирование. Так, вместо (1.3) будем писать:
|
|
Aαβ (x) |
∂2u |
|
|
+ Bα(x) |
∂u |
+ C(x)u = f(x). |
|
|||||||||||
|
|
∂xα∂xβ |
|
∂xα |
|
|
||||||||||||||
В уравнении (1.3) можно считать, что Akj = Ajk, |
|
j 6= k, т.к. |
|
|
|
|||||||||||||||
|
∂2u |
|
∂2u |
|
|
|
∂2u |
1 |
|
∂2u |
|
∂2u |
. |
|||||||
|
|
= |
|
|
|
|
|
= |
|
|
|
|
+ |
|
||||||
|
∂xj ∂xk |
∂xk∂xj |
∂xj ∂xk |
2 |
∂xj ∂xk |
∂xk∂xj |
||||||||||||||
2

М.А. Греков |
|
Уравнения математической физики |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Действительно, пусть Akj 6= Ajk. Тогда |
|
|
|
|
|
|
|
|
. |
||||
|
∂2u |
|
∂2u |
|
A + A |
kj |
∂2u |
|
|
∂2u |
|||
Ajk |
|
+ Akj |
|
|
= |
jk |
|
+ |
|
||||
∂xj ∂xk |
∂xj ∂xk |
2 |
|
∂xj ∂xk |
∂xk∂xj |
||||||||
Следовательно, матрица коэффициентов при вторых производных симметрична.
§ 2. Вывод простейших дифференциальных уравнений.
2.1Уравнение колебаний
Во многих случаях колебательный процесс описывается уравнением
ρ |
∂2u |
− r · (pru)) + qu = f(x, t), |
(2.1) |
∂t2 |
где p = p(x), q = q(x), ρ = ρ(x) определяются свойствами среды, где происходит колебательный процесс, f(x, t) интенсивность внешнего возмущения, u = u(x, t) отклоне-
ние точки от положения равновесия. Согласно определению,
|
|
r · (pru) ≡ div(p grad u) = i=1 ∂xi |
p∂xi , |
||
|
|
n |
|
|
|
|
|
X |
∂ |
|
∂u |
|
∂ |
|
|
|
|
где r = |
|
eα, eα орт оси xα. |
|
|
|
∂xα |
|
|
|
||
Малые поперечные колебания струны. Определение 1. Струна упругая нить, не сопротивляющаяся изгибу.
Рис. 1.1.
Малые колебания струны характеризуются условием
| tg α| = |
|
∂x |
|
1, |
(2.2) |
|
|
∂u |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3
М.А. Греков Уравнения математической физики
где u = u(x, t) уравнение положения струны в момент t.
Из определения следует, что натяжение струны T (x, t) в точке x направлено по касательной к струне. Кроме того, любой участок струны (a, b) при отклонении от пря-
молинейного положения равновесия практически сохраняет свою длину: |
|
|||||
l = |
ab s1 + |
∂u |
2dx ≈ b − a = l0. |
(2.3) |
||
|
Z |
|
|
|
|
|
∂x
В момент времени t натяжение струны T можно представить в виде
T = T0 + T1,
где T0 натяжение струны при t = 0, а T1 дополнительное усилие в результате
отклонения струны от положения равновесия.
По закону Гука |
l |
|
|
|
T1 = E |
|
, |
l = l − l0. |
|
|
|
|||
|
l0 |
|||
Полагая, что | l/l0| T0/E, получаем |
|
|
|
|
|T (x, t)| ≈ const = T0.
Пусть F (x, t) плотность внешних сил в точке x в момент t, направленных перпендикулярно оси x, ρ(x) линейная плотность в точке x, т.е. ρdx масса элемента dx.
Согласно закону Ньютона, проектируя все силы на вертикальную ось, получим
|
|
|
|
|
|
|
|
|
|
|
|
|
∂2u |
|
T0 sin α|x+dx − T0 sin α|x + F (x, t)dx = ρ(x)dx |
|
. |
||||||||||||
∂t2 |
||||||||||||||
Так как |
|
|
|
|
|
|
|
|
|
∂u |
|
|
|
|
|
|
|
|
|
sin α α tg α = |
|
, |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|||||
то |
|
|
|
|
|
∂x |
|
|
||||||
∂2u |
1 |
|
∂u(x + dx) |
|
∂u(x, t) |
|
|
|||||||
|
|
|
|
|
||||||||||
ρ |
|
|
− T0 |
|
|
|
− |
|
|
|
= F (x, t). |
|||
∂t2 |
dx |
∂x |
|
∂x |
|
|||||||||
При dx → 0 приходим к уравнению вынужденных малых поперечных колебаний
струны |
|
|
|
|
|
|
|
||||
ρ |
∂2u |
− T0 |
∂2u |
= F (x, t) |
(2.4) |
||||||
∂t2 |
|
∂x2 |
|||||||||
При ρ(x) = const, уравнение записывается в виде |
|
||||||||||
|
∂2u |
2 ∂2u |
|
|
(2.5) |
||||||
|
|
|
− a |
|
|
= f(x, t) |
|||||
|
∂t2 |
∂x2 |
|||||||||
и называется одномерным волновым уравнением. |
|
||||||||||
Здесь a2 = T0/ρ, f(x, t) = F (x, t)/ρ, |
|
. |
|
||||||||
{Aij} = 0 −a2 |
|
||||||||||
|
|
|
|
|
1 |
|
0 |
|
|
||
4

М.А. Греков Уравнения математической физики
Уравнение (2.5) при f = 0 уравнение свободных колебаний струны.
Двумерным аналогом уравнения (2.5) является уравнение малых колебаний
мемраны |
|
|
|
|
|
|
= f(x, y, t), |
|
|||
|
∂2u |
− a2 |
∂2u |
+ |
∂2u |
(2.6) |
|||||
|
∂t2 |
|
∂x2 |
∂y2 |
|||||||
|
|
|
Aij |
= 0 |
−a2 |
0 |
. |
|
|||
|
|
|
|
|
|
1 |
0 |
|
0 |
|
|
|
|
{ } |
|
0 |
0 |
|
−a2 |
|
|||
Уравнение колебания струны в среде с сопротивлением имеет вид
∂2u |
− a |
2 ∂2u |
+ h |
∂u |
= f(x, t), h = const. |
|||
∂t2 |
|
|
∂x2 |
|
∂t |
|||
Продольные колебания упругого стержня описываются уравнением
ρS |
∂2u |
− |
∂ |
ES |
∂u |
= SF (x, t), |
|
∂t2 |
|
∂x |
∂x |
||||
где S площадь поперечного сечения, ρ объмная плотность, E – модуль Юнга,
сила на единицу объема.
(2.7)
(2.8)
F (x, t)
Замечание 1. В отличие от струны, которая не сопротивляется изгибу, уравнение малых поперечных колебаний упругого стержня в упрощенном варианте является уравнением четвертого порядка
∂2u + c2 ∂4u = f(x, t) ∂t2 ∂x4
и справедливо для малых частот колебаний c.
Трехмерное волновое уравнение |
|
|
∂2u |
− a2 u = f |
(2.9) |
∂t2 |
описывает процессы распространения звука в однородной среде и электромагнитных волн в однородной, непроводящей среде. Этому уравнению удовлетворяет плотность газа, его давление и потенциал скоростей, а также составляющие напряженности электрического и магнитного полей и соответствующие потенциалы.
Волновой оператор обычно обозначают
|
∂2 |
|
∂2 |
∂2 |
|||
a = |
|
− a2 , |
= |
|
+ · · · + |
|
. |
∂t2 |
∂x12 |
∂xn2 |
|||||
Здесь – оператор Лапласа. При a = 1 принято 1 ≡ .
Уравнение движения однородной изотропной упругой среды: |
|
|||
|
|
∂u2 |
(2.10) |
|
pr(r · u) + q |
u + ρF = ρ |
|
. |
|
∂t2 |
||||
5

М.А. Греков |
Уравнения математической физики |
|
|
Здесь p, q постоянные величины, ρ плотность, F(x1x2x3) сила на единицу массы. При F = 0 уравнение (2.10) распадается на три уравнения
Если вектор перемещений u = u(x1, t), то говорят о плоских волнах, распространяющихся параллельно оси x1.
2 |
∂u2 |
|
∂u2 |
|
2 |
∂u2 |
|
∂u2 |
|
2 |
∂u2 |
|
∂u2 |
|
|
1 |
|
1 |
|
2 |
|
2 |
|
3 |
|
3 |
|
(2.11) |
|||
cL |
|
= |
|
, |
cT |
|
= |
|
, |
cT |
|
= |
|
. |
|
∂x2 |
∂t2 |
∂x2 |
∂t2 |
∂x2 |
∂t2 |
||||||||||
|
1 |
|
|
|
|
1 |
|
|
|
|
1 |
|
|
|
|
Решения этих уравнений представимы в виде
uj = fj (x1 − ct) + gj(x1 + ct), c = cL, cT , j = 1, 2, 3.
2.2 Уравнение диффузии и распространения тепла (уравнение теплопроводности)
Явление диффузии и распространение тепла описываются одним и тем же уравнением
ρ |
∂2u |
− div(p grad u) + qu = F (x, t). |
(2.12) |
∂t2 |
Различие состоит лишь в физической сути входящих в уравнение параметров. Выведем уравнение распространения тепла. В (2.12) u(x, t) температура сре-
ды в точке x = (x1, x2, x3), ρ(x) плотность, c(x) удельная теплоемкость, k(x) коэффициент теплопроводности. Будем считать, что среда изотропна. Пусть F (x, t) интенсивность источников тепла в точке x в момент времени t, то есть количество тепла,
поглощаемого или выделяемого в единицу времени в единице объема.
Подсчитаем баланс тепла в произвольном объеме V с границей S за время dt.
Закон Фурье. В направлении вектора нормали n к поверхности S поток тепла в единицу времени через элемент dS равен:
|
∂u |
(2.13) |
dQ1 = −k |
∂ndS, |
Поскольку постоянная k > 0, то из (2.13) следует, что при росте температуры в направлении вектора n (∂u/∂n > 0) поток тепла имеет противоположное направление
(dQ1 < 0).
Пусть S граница V , n внешняя нормаль к S, тогда по закону Фурье через S
в V за время dt поступает количество тепла |
|
|
|||
|
|
∂u |
|
|
|
Q1 = ZS |
k |
|
dSdt = ZS |
(k grad u, n) dSdt, |
|
∂n |
|||||
|
|
|
|
∂u |
|
По определению (grad u, n) = ru · n = |
|
nα, α = 1, 2, 3, nα проекция вектора |
|||
∂xα |
|||||
нормали на ось xα. При этом div(p grad u) = r · (pru).
6

М.А. Греков |
Уравнения математической физики |
|
|
||
В силу формулы Гаусса Остроградского |
||
|
Q1 = Z |
r · (kru)dV dt. |
V
Кроме того, источники выделяют количество тепла
Z
Q2 = F (x, t)dV dt.
V
Изменение температуры u за время dt в каждой точке x равно
∂u u(x, t + dt) − u(x, t) = du|x = ∂t dt.
При этом изменении выделяется или поглощается некоторое количество тепла
Z
Q3 = cρ∂u∂t dV dt,
V
где c = c(x) количество тепла, потребляемого телом единичной массы и отнесенное к бесконечно малому изменению температуры du (т. е. c dm = cρdV, dQ3 = cρdV du).
Составляя баланс тепла, приходим к равенству
|
Q3 = Q1 + Q2, |
|
или |
r · (kru) + F − cρ ∂t dV dt = 0. |
|
VZ |
||
|
|
∂u |
В силу произвольности V получим уравнение (2.12) при q = 0.
Для однородной среды c, ρ, k являются постоянными величинами. В этом случае
уравнение теплопроводности принимает вид
|
|
|
|
|
∂u |
− a2 |
u = f, |
|||||
|
|
|
|
|
|
|||||||
|
|
|
|
|
∂t |
|||||||
где |
|
|
|
|
|
|
|
k |
|
|
F |
|
|
|
|
a2 = |
|
|
|
||||||
|
|
|
|
, |
f = |
|
. |
|||||
|
|
|
cρ |
cρ |
||||||||
{ |
|
} |
|
|
0 |
|
0 |
0 |
|
|
||
Aij |
= |
0 |
|
0 |
−0 |
2 |
|
|||||
|
|
|
0 |
−a2 |
0 |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
0 |
a |
||||
|
|
|
|
|
|
|
||||||
(2.14)
0
−a2
Аналогичный вывод уравнения (2.14) можно провести, если вместо потока тепла рассматривать поток частиц. В этом случае используется закон Нэрнста (аналог закона Фурье), согласно которому поток частиц через элемент поверхности dS за единицу
времени в направлении вектора нормали равен
dQ = −D ∂u∂t dS,
7
М.А. Греков |
Уравнения математической физики |
|
|
где D(x) коэффициент диффузии, u(x, t) плотность частиц в точке x в момент времени t. Уравнение для u(x, t) имеет тот же вид (2.12) и носит название уравнения диффузии. В нем ρ – коэффициент пористости, p = D, q – характеристика поглощения
среды.
2.3Стационарное уравнение
Для стационарных процессов F (x, t) = F (x), u(x, t) = u(x) уравнение колебаний (2.9)
и уравнение теплопроводности (диффузии) (2.14) принимают вид
−r · (pru) + qu = F |
(2.15) |
или, что то же
− div(p grad u) + qu = F,
При p = const, q = 0 уравнение (2.15) сводится к уравнению Пуассона
|
|
|
|
|
F |
|
|
− u = f, |
|
f = − |
|
. |
(2.16) |
||
|
p |
||||||
Aij |
= |
0 |
1 |
0 |
. |
|
|
|
} |
1 |
0 |
0 |
|
|
|
{ |
0 |
0 |
1 |
|
|||
При f = 0 уравнение (2.16) уравнение Лапласа.
Пусть в волновом уравнении
au = f
внешнее возмущение f(x, t) = f0(x)eiωt периодическое с частотой ω и амплитудой f0. Будем искать u в виде u = u0eiωt, тогда приходим к уравнению Гельмгольца:
u0 + k2u0 = − |
f0(x) |
, k2 |
|
ω2 |
|
|
= |
|
. |
||
a2 |
a2 |
||||
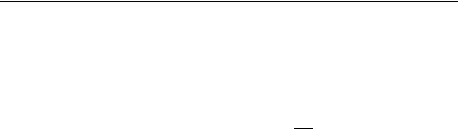
2.4Поперечные колебания тонкого прямоугольного стержня (камертона)
Дифференциальные уравнения могут иметь порядок выше второго. Рассмотрим колебание стержня, один конец которого жестко закреплен (заделан) в неподвижной недеформируемой (абсолютно жесткой) среде.
Определение формы свободных колебаний стержня и его частей сводится к решению ДУ
∂2y |
+ a2 |
∂4y |
= 0. |
(2.17) |
2 |
4 |
|||
∂t |
|
∂x |
|
|
Рис. 1.2. Камертон |
8 |
|
М.А. Греков |
Уравнения математической физики |
|
|
Приведем элементарный вывод этого уравнения. Выделим элемент стержня длины dx. Во-
первых, предполагается, что сечения, перпендикулярные оси стержня x, остаются плоскими при из-
гибе. Во-вторых, при малых деформациях длина оси стержня не меняется, то есть в момент времени t форма элемента имеет вид:
|
|
|
|
|
|
|
|
|
|
|
∂y |
|
|
∂y |
|
|
∂2y |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
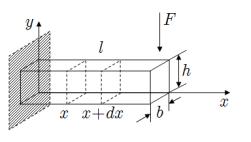
dϕ = π − (π/2 − α1 + π/2 − α2) = α1 + α2 = |
∂x |
x |
− |
∂x |
x+dx |
= − |
∂x2 |
dx. |
(2.18) |
|||||||||||
dl |
|
y=η = ( |
R |
0 + |
η |
dϕ |
= |
dl |
|
y=0 + |
ηdϕ |
= |
dx |
+ ηdϕ. |
(2.19) |
|||||
| |
|
) |
|
|
| |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Изменение длины элемента:
Рис. 1.3.
Полный изгибной
dl = dl|y=η − dl|y=0 = ηdϕ. |
(2.20) |
Сила натяжения, действующая вдоль слоя, находящегося на расстоянии η от оси x, равна
dN = EdS |
dl |
= Ebdη |
ηdϕ |
= −Eb |
∂2y |
ηdη, |
(2.21) |
dx |
dx |
∂x2 |
где E – модуль Юнга, S – площадь. момент в сечении x равен
h/2 |
|
|
h/2 |
|
|
|
|
M = Z |
ηdN = −Eb |
∂2y |
Z |
η2dη = −EI |
∂2y |
, |
(2.22) |
∂x2 |
∂x2 |
||||||
−h/2 |
|
|
−h/2 |
|
|
|
|
где
Zh/2
I = b η2dη = bh3 (2.23)
12
−h/2
момент инерции прямоугольного сечения относительно оси z.
Рассмотрим выделенный элемент под действием тангенциальных сил F и F + dF и моментов M и M + dM. Условие равенства нулю моментов относительно точки x + dx (точки A) приводит к равенству
F dx = dM. |
|
|
(2.24) |
|||
Отсюда в силу равенства (2.22) |
|
|
|
|||
|
∂M |
|
∂3y |
|
(2.25) |
|
F = ∂x = −EI |
∂x3 . |
|||||
|
||||||
9

М.А. Греков |
Уравнения математической физики |
|
||
|
|
|
||
Условие равенства нулю сил, действующих на элемент, включая силы инерции, |
||||
дает |
|
|
|
|
|
|
∂2y |
(2.26) |
|
|
dF = ρS |
|
dx, |
|
|
2 |
|||
|
|
∂t |
|
|
где ρ плотность стержня, S площадь поперечного сечения, ρSdx масса элемента
стержня. Из (2.25) и (2.26) следует
∂2y |
+ a2 |
∂4y |
= 0, |
(2.27) |
2 |
4 |
|||
∂t |
|
∂x |
|
|
где a2 = EIρS .
§ 3. Классификация линейных и квазилинейных уравнений второго порядка
Уравнения второго порядка в частных производных классифицируются в зависимости от свойств характеристических (собственных) чисел матрицы
|
|
A11 |
A12 |
|
A = |
|
A21 |
A22 |
|
|
. . . . . . |
|||
|
||||
|
An1 |
An2 |
||
. . . A1n
. . . A2n
. . . . . .
. . . Ann
.
Характеристические числа корни уравнения
|
− |
|
|
A11 − λ |
A12 . . . |
Det(A |
|
λI) = |
|
A21 |
A22 − λ . . . |
|
|
|
|
|
|
|
|
|
|
|
. . . . . . |
|
|
|
. . . |
||
|
|
|
|
|
|
|
|
|
|
An1 |
An2 . . . |
|
|
|
|
||
. . . |
|
|
|
|
A1n |
|
|
|
|
Ann |
− |
λ |
|
|
|
|
|
|
|
A2n |
|
|
= 0. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Все характеристические числа симметричной матрицы A вещественны. Рассмот-
рим дифференциальное уравнение второго порядка более общего вида чем ранее:
j,k=1 Ajk(x) |
∂xj ∂xk |
+ Φ x1, . . . , xm, u, ∂x1 |
, . . . , ∂xm = 0, |
(3.1) |
||
n |
|
|
|
|
|
|
X |
∂2u |
|
∂u |
|
∂u |
|
где Φ – произвольная функция. Уравнение (3.1) – квазилинейное. Зафиксируем точку x, в которой определены коэффициенты (3.1) и пусть в этой точке матрица A имеет α положительных, β отрицательных, γ нулевых характеристических чисел, причем α +
β + γ = n.
Определение 1. Будем говорить, что в рассматриваемой точке x уравнение (3.1) принадлежит к типу (α, β, γ). Изменение знака в (3.1) не меняет типа уравнения,
10