

МУ ТМ_2015 / Статика Т.1 (Дадочкина, Дрожжин)
.pdfМинистерство образования и науки Российской Федерации
Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования
«Сибирский государственный индустриальный университет»
Кафедра теоретической механики
СТАТИКА
Тема 1. Равновесие сходящейся системы сил
Методические указания для выполнения
самостоятельной работы по дисциплине «Теоретическая механика»
для студентов всех специальностей и направлений подготовки очной формы обучения
Новокузнецк
2012
УДК 378.147(075) С 78
Рецензент
доктор технических наук, профессор, заведующий кафедрой сопротивления материалов и строительной механики СибГИУ А.Г. Никитин
С 78 Статика. Тема 1. Равновесие сходящейся системы сил: метод. указ./ Сиб. гос. индустр. ун-т; сост.: Т.Н. Дадочкина, В.В. Дрожжин.– Новокузнецк: Изд. центр СибГИУ, – 2012. – 35с.
Методические указания включают краткую теоретическую часть, примеры решения задач, рекомендации по решению, 25 вариантов индивидуальных комплексных заданий по 6 задач в каждом варианте, расположенных по возрастающей сложности, в которых представлены основные типы связей и все виды нагрузок.
Рекомендуются для студентов всех специальностей и направлений подготовки очной формы обучения.
.
2
НЕКОТОРЫЕ ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ СТАТИКИ
Статика – это раздел теоретической механики, в котором изучают методы эквивалентных преобразований различных систем сил и устанавливают условия равновесия сил, приложенных к твердому телу.
Системой сил называют совокупность нескольких сил, приложенных к точке, телу или системе тел.
Встатике рассматриваются абсолютно твёрдые тела, т.е. тела, которые не деформируются под действием приложенных к ним сил.
Втеоретической механике изучаются свободные (условно) тела.
Вреальных задачах тела несвободные, т.е. их движение ограничивается другими телами. Тела, накладывающие ограничения на движение изучаемого тела в пространстве, называют связями этого тела.
Силу, с которой связь действует на тело, называют реакцией связи.
На основании принципа освобождаемости от связей, несвободное тело (конструкция) рассматривается как свободное, если мысленно освободить его от наложенных связей и приложить к нему (к системе) реакции связей.
Реакция связи направлена в сторону противоположную направлению, в котором связь препятствует перемещению рассматриваемого тела. Направление реакции зависит от конструктивных особенностей связи. Все связи можно условно разделить на три группы.
Кпервой группе относят связи, конструкция которых позволяет однозначно определить направление реакции (связи 1 – 4, см. ниже).
Ко второй группе относят связи, конструкция которых позволяет однозначно определить только линию действия реакции (связь 5, см. ниже).
Ктретьей группе относятся связи, конструкция которых не позволяет определить ни линию действия, ни направление реакции (связи 6 – 8, см. ниже). Для таких связей реакция представляется её составляющими, равными алгебраическому значению проекций на произвольно выбранные координатные оси.
3
Типы связей и их реакции
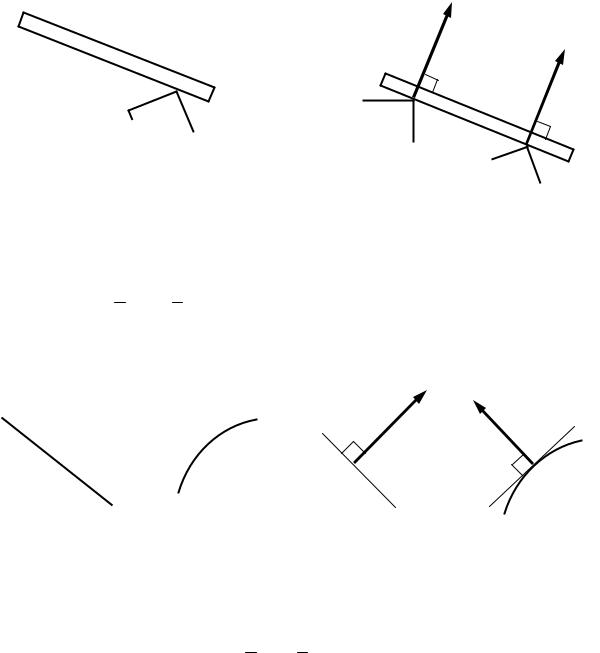
1. Гладкая поверхность
Линия действия реакции гладкой поверхности направлена по нормали к общей касательной соприкасающихся поверхностей тел
независимо от сил, приложенных к рассматриваемому телу. |
N A и NB |
|||||||
направлены от опорной поверхности к телу (рисунок 1). |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
N |
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
А |
|
|
|
N |
B |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
 В А
В А
В
Рисунок 1 – Гладкая поверхность
2. Точечная связь или опора на ребро (уступ)
Реакции N A и NB перпендикулярны поверхности опирающегося тела и направлены от опор к телу (рисунок 2).
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N |
A |
NB |
||||
|
|
|
|
|
|
|
|
|
|
τ |
А |
|
В |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
|
А |
|
|
|
В |
|||||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
τ |
|||
|
Рисунок 2 – Точечная опора |
|
|
|
|
|||||
3. Гибкие связи (нити, цепи, канаты, тросы)
Реакции гибких связей RA и RB направляются по нитям от тела,
равновесие которого рассматриваем (рисунок 3). Гибкие связи работают только на растяжение.
4

|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
A |
R |
B |
|||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
А |
В |
|
|
А |
В |
|
||||
|
Рисунок 3 – Гибкие связи |
|
|
|
|
|
|
|
||
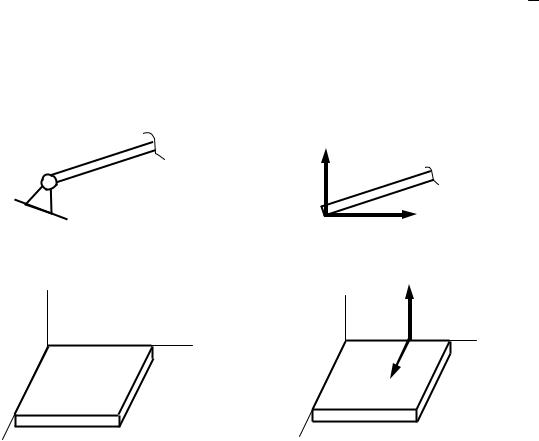
4. Подвижная шарнирная связь (опора на катках)
Реакции RA и RB перпендикулярны к опорным поверхностям и
направлены от опор к телу (рисунок 4). |
|
а) |
RA |
А |
|
b) |
RB |
|
|
В |
|
Рисунок 4 – Опора на катках
5. Невесомые стержни (с шарнирами на концах)
Реакции RB и RC направлены по осям стержней в произвольном направлении (рисунок 5). (Стержни могут работать и на сжатие и на
RB |
|
В С |
RC |
А |
|
RA |
|
Рисунок 5 – Невесомые стержни |
|
5 |
|
растяжение). В случае изогнутых стержней линия действия реакции RA проходит через оси шарниров.
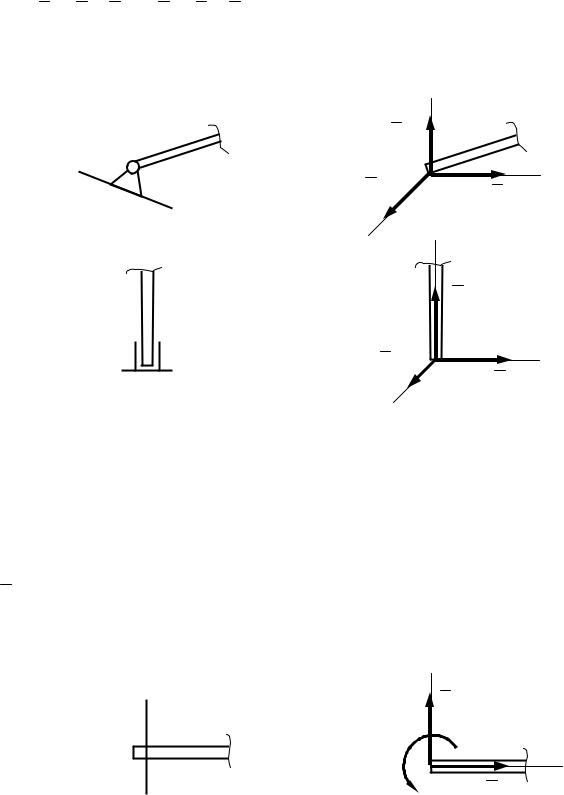
6. Неподвижный цилиндрический шарнир
Реакции неподвижных цилиндрических шарниров (А или В) RA
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
R |
B изображаются их составляющими X |
A , YA или |
XB , ZB , парал- |
||||||||||||||||||||||
лельными выбранным координатным осям (рисунок 6). |
|
|
|
|
|
|
|||||||||||||||||||
|
|
а) |
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
А |
|
|
|
|
|
|
|
YA |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
А |
|
|
|
|
|
|
|
|
|
|
|
х |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X |
A |
|
|
|
|
|
|
||||
|
|
b) |
z |
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
ZB |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
О |
|
|
В |
y |
|
|
О |
|
|
|
|
|
|
|
В |
|
y |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
X |
B |
|
|
|
|
|
|
|||||
|
|
х |
|
|
|
|
х |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Рисунок 6 – Неподвижный цилиндрический шарнир: a – ось шарнира А перпендикулярна плоскости рисунка; b – ось шарнира В совпадает с осью Оу.
7. Сферический шарнир (А) и подпятник (В)
Тела, соединенные сферическим шарниром, могут как угодно поворачиваться одно относительно другого вокруг центра шарнира. Следовательно, реакция RA сферического шарнира может иметь лю-
бое направление в пространстве. Произвольное направление в про- странстве может иметь и реакция подпятника (подшипник с упором) RB . При решении задач эти реакции изображаются их составляющи-
6
ми ( X A , YA , ZA и XB , YB , ZB ), параллельными выбранным осям координат (рисунок 7).
|
|
z |
|
А |
ZA |
|
|
X A |
|
у |
|
|
А |
||
|
YA |
||
|
x |
z |
|
|
|
|
|
|
|
|
ZB |
В |
XB |
В |
у |
|
YB |
||
|
x |
|
|
Рисунок 7 – Сферический шарнир А и подпятник В
8. Жесткая заделка (при плоской системе сил)
Реакция жесткой заделки представляется двумя составляющими X A , YA , параллельными координатным осям, и реактивной парой с моментом МА (рисунок 8).
|
|
у |
|
|
YA |
А |
MA |
x |
А X A
Рисунок 8 – Жесткая заделка
Для связей (5 – 8), реакции которых представляются составляющими, полная реакция определяется их векторной суммой, а направление определяется направляющими косинусами:
7
RA = X A +YA , RA |
= X A2 +YA2 , cos(RA |
; Ox) = X A . |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RA |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
При решении задач направления составляющих ( X A , YA ) выби-
раются произвольно. Если при вычислении значение составляющей реакции окажется отрицательной, это означает, что её реальное направление будет противоположно направлению, принятому первоначально.
РАВНОВЕСИЕ СХОДЯЩЕЙСЯ СИСТЕМЫ СИЛ
Систему сил называют сходящейся, если линии действия всех приложенных сил пересекаются в одной точке. Если линии действия сил расположены в одной плоскости, то систему называют плоской сходящейся. В противном случае система будет пространственной сходящейся.
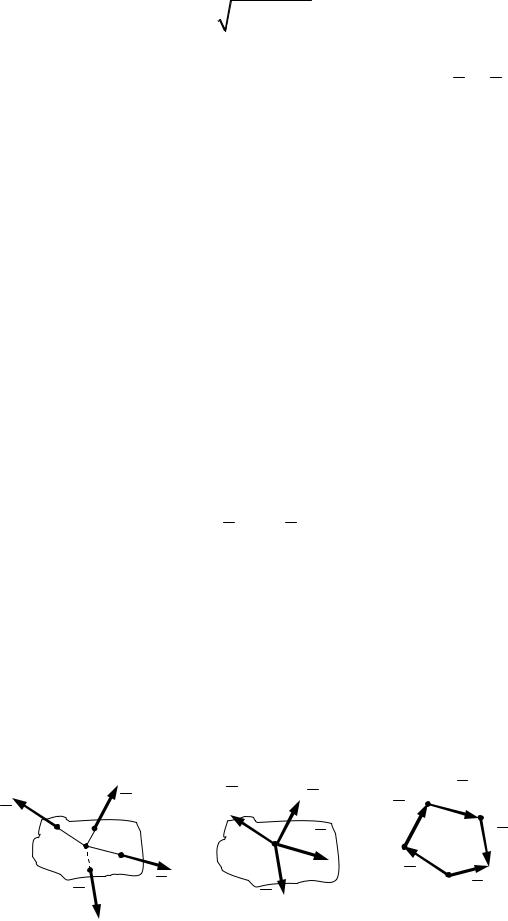
Сходящаяся система сил эквивалентна одной силе, которую называют равнодействующей. Равнодействующая равна векторной сумме сил системы и линия её действия проходит через точку пересечения линий действия всех сил системы:
n
R = ∑ Fk . (1)
k=1
Данное уравнение соответствует графическому способу нахождения равнодействующей построением векторного (силового) многоугольника. Этот способ вытекает из сложения векторов по правилу параллелограмма.
На рисунке 9а изображена сходящаяся система из 4 сил. На основании следствия из аксиомы (о переносе точки приложения силы по линии её действия), силы системы можно перенести в точку схода сил, т.е. в точку О (рисунок 9b).
|
F |
F1 |
|
F |
F2 |
b F3 |
c |
F |
|
|
2 |
|
|||
2 |
|
|
|
|
|||
1 |
|
|
|
F3 |
|
|
F4 |
|
О |
|
О |
а |
|
||
|
|
|
|
d |
|||
|
|
F3 |
|
|
F1 |
|
|
|
F4 |
F4 |
|
О F |
|||
|
|
|
|
|
3 |
||
|
|
|
|
|
|
|
|
|
а) |
|
b) |
|
|
c) |
|
Рисунок 9 – Плоская сходящаяся система сил
8

Из точки О (рисунок 9c) в выбранном масштабе строится вектор силы F1 . Из конца вектора F1 строится вектор силы F2 и т.д. Вектор R,
соединяющий точку О с концом последнего вектора складываемых сил, и будет равнодействующей данной системы сил.
Геометрическая фигура Оаbcd называется векторным (силовым) многоугольником. Силы в силовом многоугольнике можно строить в любой последовательности, при этом будет меняться его форма, но равнодействующая остается неизменной. Силовой многоугольник может быть плоской фигурой, если система сил плоская, или пространственной – при пространственной системе сил.
Если силовой многоугольник строить строго в масштабе, соблюдая параллельность линий действия сил, то величину равнодействующей можно определить непосредственным измерением длины вектора R.
Величину и направление равнодействующей можно определить аналитическим способом. Для этого следует выбрать систему прямоугольных осей координат и спроецировать векторное равенство (1) на выбранные оси, учитывая, что проекция вектора суммы на какуюлибо ось равна алгебраической сумме проекций слагаемых векторов на ту же ось.
Проекция равнодействующей на координатную ось равна алгебраической сумме проекций сил системы на ту же ось, т.е. векторное равенство (1) проецируется на выбранные координатные оси:
n |
|
|
n |
n |
|
||||||
Rx = ∑ Fkx , |
Ry = ∑ Fky , Rz = ∑ Fkz , |
(2) |
|||||||||
k=1 |
|
|
k=1 |
k=1 |
|
||||||
|
|
= Rx |
|
+ Ry |
|
+ Rz |
|
. |
|
(3) |
|
|
R |
i |
j |
k |
|
||||||
Модуль равнодействующей определяется известным образом:
|
|
|
= R2 |
+ R2 |
+ R2 . |
(4) |
R |
||||||
|
|
|
x |
y |
z |
|
Направление вектора равнодействующей относительно координатных осей определяется направляющими косинусами:
|
|
|
|
|
R |
x |
|
|
|
|
|
|
Ry |
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
cos(R ; i ) = |
|
, |
cos(R ; |
j ) = |
|
, cos(R ; k ) = |
z |
. |
(5) |
||||||||||||
|
|
R |
|
||||||||||||||||||
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
R |
|
||||
Для равновесия сходящейся системы сил необходимо и достаточно, чтобы ее равнодействующая была равна нулю
9
n
R = ∑ Fk = 0. (6)
k=1
Из равенств (4) и (6) вытекают аналитические условия равнове-
сия:
|
|
|
= R2 |
+ R2 |
+ R2 |
= 0, т.е. |
R |
|
= 0, R |
|
= 0, R = 0. |
|
R |
|
x |
y |
|||||||
|
|
|
x |
y |
z |
|
|
|
z |
На основании уравнений (2):
n |
n |
n |
|
∑ Fkx = 0, |
∑ Fky = 0, |
∑ Fkz = 0, |
(7) |
k=1 |
k=1 |
k=1 |
|
т.е. для равновесия системы сходящихся сил, действующих на
твёрдое тело, необходимо и достаточно, чтобы суммы проекций сил системы на выбранные прямоугольные координатные оси одновременно равнялись нулю.
В случае плоской системы сходящихся сил для её равновесия
необходимо и достаточно, чтобы суммы проекций этих сил на каждую из двух прямоугольных координатных осей, лежащих в плоскости сил, одновременно равнялись нулю.
Решение задач на равновесие несвободного твердого тела (или точки), к которому приложена система сходящихся сил, рекомендуется выполнять в следующем порядке:
1.Уяснить физическую сущность задачи, выписать исходные данные и искомые величины.
2.Выполнить расчётную схему, учитывая заданные параметры:
•выделить твердое тело (точку), равновесие которого следует рассматривать для определения неизвестных величин;
•показать на рисунке заданные (активные) силы;
•определив тип наложенных на выделенное тело (точку) связей, показать их реакции;
•выбрать систему координат, располагая оси (или одну из осей) параллельно линиям действия реакций связей.
3.Записать условия равновесия полученной системы сил и составить соответствующие уравнения равновесия.
4.Решить в общем виде систему составленных уравнений равновесия относительно величин, подлежащих определению. Если в результате решения величина какой-либо из определяемых сил окажется отрицательной, то это означает, что направление силы противоположно предварительно принятому направлению.
10