

МУ ТМ_2015 / Кинематика Т.2 (Живаго, Дадочкина, Ермаченко, и др
.).pdfМинистерство образования и науки РФ
Федеральное бюджетное государственное образовательное учреждение высшего профессионального образования
«Сибирский государственный индустриальный университет» Институт фундаментального образования
Кафедра теоретической механики и графики
КИНЕМАТИКА ТЕМА 2. ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ
ТВЕРДОГО ТЕЛА ОТНОСИТЕЛЬНО НЕПОДВИЖНОЙ ОСИ
Методические указания по выполнению самостоятельной работы по дисциплине «Теоретическая механика»
для студентов очной формы обучения
Новокузнецк
2014
1
УДК 378.147 К 41
Рецензент доктор технических наук, профессор
заведующий кафедрой автомобильного транспорта и технологических машин
А.Г. Никитин
К41 Кинематика. Тема 2. Вращательное движение твердого тела относительно неподвижной оси: метод. указ. /Сост.: Э.Я. Живаго, Т.Н. Дадочкина, М.В. Ермаченко, Н.И. Михайленко, В.В. Дрожжин. СибГИУ. – Новокузнецк, 2014. – 44 с.
Включают краткую теоретическую часть, пример решения задачи, рекомендации для самостоятельной работы, 25 вариантов индивидуальных комплексных заданий по 6 задач в каждом варианте.
Рекомендуются для студентов очной формы обучения.
2

ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА ОТНОСИТЕЛЬНО НЕПОДВИЖНОЙ ОСИ
Вращательным движением (или просто вращени-
ем) твердого тела относительно неподвижной оси называется такое движение, при котором хотя бы две точки, принадлежащие телу, остаются неподвижными во время движения тела. Прямая АВ (рисунок 1), проходящая через эти неподвижные точки называется осью вращения тела.
Точки тела, расположенные на оси вращения неподвижны. Все остальные точки тела описывают окружности, плоскости которых перпендикулярны оси вращения, а центры лежат на этой оси.
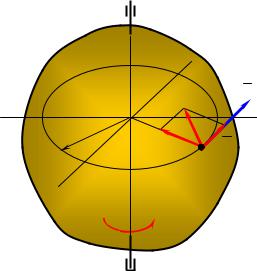
Положение вращающегося тела (рисунок 1)
определяется углом (углом поворота тела) между двумя полуплоскостями I и II, проведенными через ось вращения. Полуплоскость I – неподвижная, полуплоскость II скреплена с вращающимся телом. Зависимость угла поворота от времени выражает закон вращательного движения тела относительно неподвижной оси (уравнение движения):
f (t).
Основными кинематическими характеристиками вращательного движения тела являются его угловая скорость и угловое ускорение .
Вектор угловой скорости направлен по оси вращения в ту сторону, откуда вращение тела видно происходящим против хода часовой стрелки (рисунок 2).
Вектор углового ускорения совпадает по направлению с вектором угловой скорости при ускоренном вращении, и противоположен при замедленном движении.
3

В |
|
I |
|
|
|
0, |
|
II |
0. |
||
|
|||
А |
|
|
|
Рисунок 1 – Вращательное |
Рисунок 2 – Угловые скорость и |
||
движение |
ускорение тела |
||
Алгебраическое значение угловой скорости определяется как первая производная по времени от угла поворота тела. Алгебраическое значение углового ускорения равно первой производной по времени от угловой скорости или второй производной от угла поворота тела:
|
d |
|
рад/с, |
d |
|
d 2 |
2 |
. |
dt |
|
dt |
|
dt2 |
рад/с |
Если знаки ω и совпадают, то вращение будет ускоренным, если не совпадают – замедленным.
Алгебраическую угловую скорость и
алгебраическое угловое ускорение на рисунках изображают дуговыми стрелками вокруг оси вращения. Дуговая стрелка для угловой скорости указывает направление вращения тела. При ускоренном вращении
дуговые стрелки и имеют одинаковое направление, при замедленном – противоположное (рисунок 2).
В технике скорость вращения (частоту вращения) задают числом оборотов в минуту – n об/мин, а угол поворота тела – числом оборотов N за какое-то время.
Зависимость между N оборотов и радиан определяется выражением = 2 N, а n об/мин и рад/с – 30n .
4
Скорости и ускорения точек вращающегося тела (рисунок 3) определяются по выражениям:
V R, a |
n |
2 R, |
a R. |
|
|
|
где R – кратчайшее расстояние от точки до оси вращения.
O |
a |
V |
|
||
|
|
|
R |
|
a |
an |
|
|
|
|
A |
 z
z
z
Рисунок 3 – Скорость и ускорение точки при вращательном движении тела
Преобразование простейших движений твёрдого тела
Под преобразованием простейших движений следует понимать:
а) преобразование вращательного движения одного тела в поступательное другого (и обратное преобразование);
б) преобразование вращения одного тела вокруг неподвижной оси во вращение другого тела вокруг своей неподвижной оси.
5

При решении задач о движении механизмов, преобразующих простейшие движения, следует пользоваться совместно формулами кинематики точки и формулами кинематики твёрдого тела, вращающегося относительно неподвижной оси.
Передача вращательного движения от одной машины к другой или внутри машины от одного её вала к другому осуществляется разнообразными механизмами, носящими название передач.
Передачи могут быть разделены на передачи с гибкой связью (ременную, канатную, цепную) и передачи, осуществляемые путем непосредственного соприкосновения тел (фрикционную, зубчатую).
Валы и закреплённые на них шкивы и колёса называются ведущими, если они передают движение, и ведомыми, когда они его воспринимают.
Ремённые передачи. Ремённые передачи передают вращение одного тела другому, когда их оси вращения параллельны. Передачи подразделяются на прямую (рисунок 4а) и перекрестную (рисунок 4b).
а) 1 |
|
b) |
1 |
2 |
|
|
|
||
|
2 |
2 |
|
2 |
1 |
|
1 |
||
|
|
|
Рисунок 4 – Ременная передача: а – прямая, b – перекрестная
Зубчатые передачи. Они являются одним из самых распространенных видов передаточных механизмов, в которых передача вращения осуществляется с помощью зубчатых колёс. Зубчатые пары бывают с внешним зацеплением (рисунок 5а) и внутренним (рисунок 5b). Передача движения может осуществляться между парал-
6
лельными осями с цилиндрическими колёсами и пересекающимися осями с коническими колёсами (рисунок 5с)
a)
1 2
1 |
2 |
b) |
c) |
2 |
1 |
2 |
d |
|
1 |
2 |
1 |
1 |
|
|
2 |
1 |
d2 |
|
Рисунок 5 – Зубчатые передачи: а – внешнее зацепление,
b)внутреннее зацепление, с) передача с коническими колесами
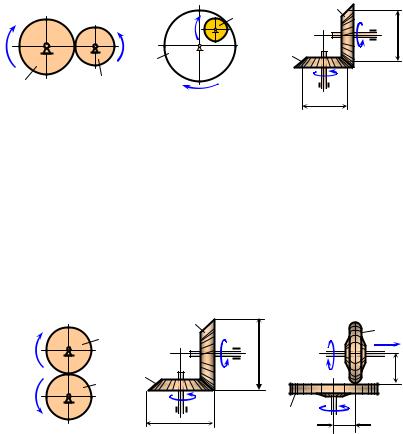
3.Фрикционные передачи. Фрикционная пара пред-
ставляет собой два прижатых друг к другу колеса (шкива, вала). Вращение одного колеса передаётся другому за счёт сил трения между поверхностями колёс (рисунок 6).
На рисунке 6а изображена фрикционная передача с параллельными осями и цилиндрическими колёсами, на рисунке 6b – передача с пересекающимися осями, осуществляемая коническими колёсами.
а) |
1 |
1 |
b) |
1 |
1 |
c) |
2 |
|
|
|
|
|
d |
|
|
|
|
|
2 |
|
|
|
2 |
|
|
2 |
|
1 |
|
R |
|
|
|
|
|
|
|
||
|
|
|
|
d2 |
2 |
1 |
x |
|
2 |
|
|
|
|||
|
|
|
|
|
|
|
|
Рисунок 6 – Фрикционные передачи: а) цилиндрические колеса, b) конические |
|||||||
|
|
|
колеса, с) лобовая передача |
|
|
||
Во всех колёсных парах (рисунки 4, 5 и 6) контактные точки (точки сцепления) имеют общую скорость и общее касательное ускорение, следовательно, справедливы равенства:
7

|
|
R |
|
R , |
1 |
|
R2 |
, |
|
|
R |
|
R , |
1 |
|
R2 |
, |
||
|
|
R |
|
|
R |
||||||||||||||
|
1 |
1 |
2 |
2 |
|
2 |
|
|
|
1 |
1 |
2 |
2 |
|
2 |
|
|
||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
1 |
|
||
Отношение угловой скорости ведущего колеса к угловой скорости ведомого колеса называется
передаточным отношением (передаточным числом)
механизма:
u12 1 R2 d2 .2 R1 d1
Для лобовой передачи (вариатора), позволяющей путем поступательного перемещения колеса 2 вдоль диаметра колеса 1 получить переменное передаточное отношение между ведущим и ведомым валами (рисунок 6c), будем иметь:
u12 = 1 R2 .
2 x
Принято считать, что если не учитывать проскальзывание, то при ременной передаче (рисунок 4) точки бесконечного ремня и поверхностей шкивов также имеют одинаковые скорости и касательные ускорения, следовательно, справедливы те же соотношения.
Пример. Груз 1, подвешенный на нерастяжимой нити, намотанной на барабан 2, опускается (рисунок 7) по закону х = х(t). По заданному уравнению х = х(t) прямолинейного поступательного движения груза определить скорость и ускорение точки М механизма в момент времени, когда груз пройдет расстояние S.
Исходные данные: R2 = 50 cм, r2 = 30 см, R3 = 60 см, r3 = 40 см, R4 = 50 см, S = 0,4 м, х = 20 + 70t2 (х – см, t – c).
Определить: V M , аМп , аМ , аМ .
8

РЕШЕНИЕ
1. Найдем момент времени tS, когда путь S, пройденный грузом 1, равен 40 см
S xt ts xt 0 70 ts2 ,
откуда ts  70S
70S  4070 0,76 c.
4070 0,76 c.
2. Определяем скорость груза:
V dx 140 t , при t = t |
S |
= 0,76 с, V = 106,4 см/с. |
||||||
1 |
|
dt |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
3. Определяем угловую скорость и угловое ускорение |
||||||||
тела 2 |
|
|
V1 |
140 t |
|
|
|
|
|
|
2 |
4,67 t , |
|
||||
|
|
|
r2 |
30 |
|
|
|
|
при t = t |
S |
= 0,76 с, ω = 3,55 рад/с, |
2 |
d 2 |
4,67 рад/с2. |
|||
|
2 |
|
|
|
dt |
|
||
|
|
|
|
|
|
|
|
|
Так как ε2 не зависит от t, то вращение тела 2 является равноускоренным.
4. Определяем угловую скорость и угловое ускорение тела 3.
Так как 3 R3 2 R2 , то
3 |
|
R2 |
2 |
50 |
4,67 t 3,89 t рад/с, |
|
||
|
60 |
|
||||||
|
|
R3 |
|
|
|
|||
3 |
d 3 3,89 рад/с2, при t = tS, ω3 = 2,94 рад/с. |
|||||||
|
|
dt |
|
|
|
|
|
|
5.Определяем угловую скорость и угловое ускорение |
||||||||
тела 4. Так как 4 |
|
R4 3 |
r3 , то: |
|
||||
|
|
|
4 |
|
r3 |
3 |
40 3,89 t 3,11t |
рад/с, |
|
|
|
|
R4 |
||||
|
|
|
|
|
|
50 |
|
|
|
|
|
|
|
|
|
|
9 |

4 d 4 3,11 рад/с2, dt
при t = tS, ω4 = 2,36 рад/с.
|
3 |
3 |
3 |
2 |
R2 r2 |
|
|
2 |
R3 |
|
r3
€
1 |
V M |
аМ |
п |
|
|
|
|
аМ |
|
V 1 |
аМ |
М |
3R4 |
4 |
|
|
4 |
||
х |
|
4 |
|
Рисунок 7 – Схема механизма
6. Определяем скорость и ускорения точки М:
|
|
|
|
|
|
VM = 4·r4 = 1,18 м/с, |
|
= 2,78 м/с2, |
||||||
|
|
|
4 |
r |
4 |
= 1,56 м/с2, |
|
n = |
2 |
r |
3 |
|||
a M |
|
|
|
|
|
a M |
4 |
|
|
|||||
|
|
|
|
a |
M |
r |
2 |
4 |
3,19 |
м/с2. |
||||
|
|
|
|
|
4 |
4 |
|
4 |
|
|
|
|
|
|
Направления |
всех |
найденных |
|
кинематических |
||||||||||
характеристик показаны на рисунке 7.
ЗАДАНИЯ ДЛЯ САМОСТОЯТЕЛЬНОЙ РАБОТЫ
Эта тема представлена 25 вариантами по 6 задач в каждом варианте. Рисунки к задачам 5 и 6 приведены на
страницах 35 42.
Основные кинематические задачи при данном виде движения условно можно объединить в четыре группы.
10