

МУ ТМ_2015 / Кинематика Тема4 (Живаго, Михайленко)
.pdfИнститут машиностроения и транспорта
Кафедра теоретической механики
КИНЕМАТИКА
Тема 4. ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Практикум
|
|
|
|
|
Е |
|
О2 |
х |
|
|
|
|
4 |
|
|
А |
|
|
|
|
|
||
аАτ |
30° |
|
2 |
|
|
||
VA |
аАп |
|
1 |
|
|
|
|
|
60° |
|
|
VВ |
|
||
|
|
|
|
|
|||
|
|
VD |
|
3 |
аВ |
|
|
|
О |
D |
|
||||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
аВАп |
|
В |
|
|
|
|
|
у |
аτ |
30° |
|
|
|
|
|
ВА |
|
|
Новокузнецк
2013
Министерство образования и науки Российской Федерации
Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования
“Сибирский государственный индустриальный университет”
Кафедра теоретической механики
КИНЕМАТИКА
Тема 4. ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Практикум для выполнения расчетно-графических работ
по дисциплине “Теоретическая механика”
Новокузнецк
2013
УДК 531 (075) К41
Рецензент:
доктор технических наук, профессор, зав. кафедрой теории механизмов и машин и основ конструирования СибГИУ
Л..Т. Дворников
К41 Кинематика: Практикум. / Сиб. гос. индустр. ун-т; сост.: Э.Я. Живаго, Н.И. Михайленко. – Новокузнецк: Изд. центр СибГИУ, 2013. – 42 с., ил.
Приводятся материалы для комплексной организации самостоятельной работы, в том числе методические рекомендации к решению задач по дисциплине “Теоретическая механика”, раздел “Кинематика”, излагается краткая теория, примеры решения и оформления задач, варианты заданий и ответы к ним, а также список рекомендуемой литературы.
Тема 4. ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Плоскопараллельным (или плоским) движением твердого тела называют такое движение, при котором все его точки движутся в плоскостях, параллельных некоторой плоскости П, принятой за неподвижную.
Плоскопараллельное движение можно рассматривать как сложное, состоящее из поступательного движения вместе с полюсом (в качестве полюса можно выбирать любую точку) и вращательного движения вокруг полюса.
Уравнения плоского движения имеют вид:
хА = f1 (t); yА = f2 (t); ϕА = f3 (t) .
Плоскопараллельное. движение характеризуется линейными скоростью и ускорением полюса и угловыми скоростью и ускорением вращения относительно полюса.
Скорость любой точки М плоской фигуры можно определить тремя способами:
1) с помощью полюса
VM =VA +VMA ,
где VMA =ω MA, VMA МА, ω − угловая скорость вращения фигуры вокруг полюса, ω = ddϕt =ϕ&.
2) по теореме о проекциях (рисунок 1): проекции скоростей точек
плоской фигуры на прямую, проходящую через эти точки, равны между собой:
VA cosα =VM cos β .
|
|
|
|
VB |
|
VA |
|
β |
х |
|
α |
|
||
А |
В |
|
||
VAх |
|
VВх |
Рисунок 1 – Проекции скоростей на ось х
3) с помощь мгновенного центра скоростей.
Мгновенным центром скоростей (МЦС) называют геометрическую точку, принадлежащую плоской фигуре или её мысленному продолжению, скорость которой в данный момент времени равна нулю.
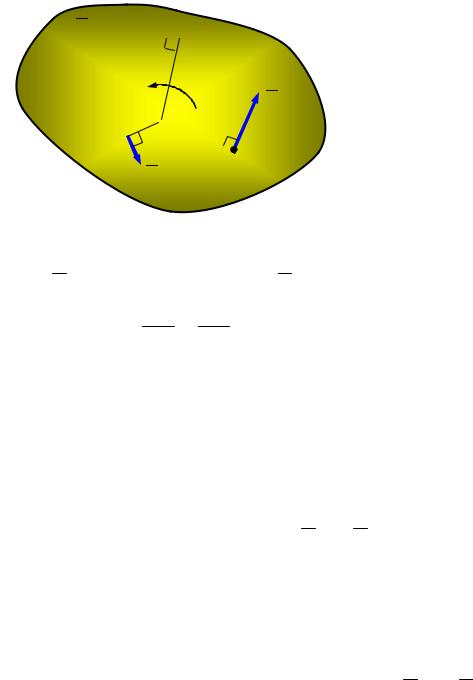
При известном положении МЦС скорости точек плоской фигуры при её движении в своей плоскости определяются так, как если бы фигура вращалась в этот момент времени вокруг МЦС (точка Р) с угловой скоростью ω (рисунок 2), то есть:
VB  B
B
ω
VA
С Р
Р
VC А
Рисунок 2 − Определение скорости точки с помощью МЦС
VA =ω AP (VA AP) , V B = ω BP (VB BP) и т.д.
ω = VAPA = VBPB .
Способы построения мгновенного центра скоростей
1.Если тело А катится без скольжения по неподвижной поверхности тела В (рисунок 4.3,а), то точка касания Р имеет в данный момент времени скорость, равную нулю и, следовательно является МЦС (VP = 0.
2.Если известны направления скоростей VA и VB двух точек
плоской фигуры, то МЦС − это точка пересечения перпендикуляров, проведенных из точек А и В к векторам их скоростей (рисунок 3,b).
3. Если скорости точек А и В плоской фигуры параллельны друг другу и перпендикулярны отрезку АВ, то МЦС это точка пересечения прямых, проходящих через концы векторов VA и VB
(рисунки 3, c,d).
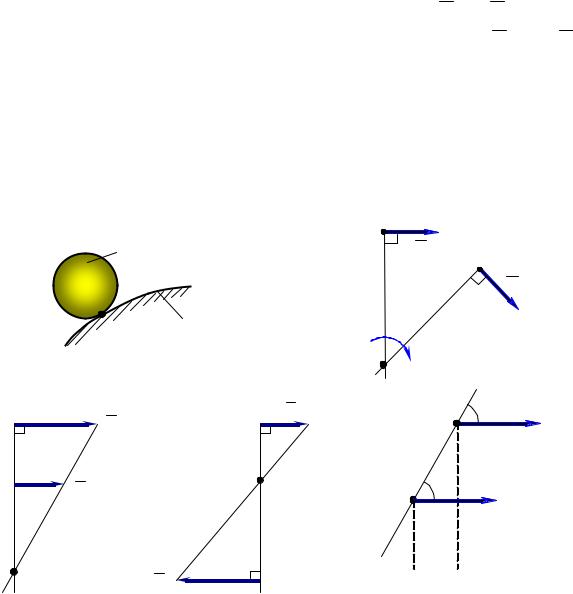
4. Если скорости точек А и В плоской фигуры параллельны друг другу, но не перпендикулярны отрезку АВ, то VA = VB , а МЦС лежит в бесконечности, так как перпендикуляры к VA и VB ,
проведенные из этих точек не пересекаются (рисунок 3,е). Угловая скорость тела в этот момент времени равна нулю
(ω = lim VA |
= 0 ). Такое движение называется мгновенно |
AP →∞ AP |
|
поступательным и скорости всех точек фигуры в данный момент времени равны друг другу по модулю и по направлению.
|
а) |
А |
|
b) А |
VА |
В |
|
|
|
|
|||
|
|
|
|
|
|
VВ |
|
|
Р |
В |
|
|
|
|
|
|
|
Р |
ω |
|
с) |
|
|
d) |
VA |
e) |
α |
А |
|
VA |
|
А |
VA |
|
|
|
А |
В |
VB |
Р |
В |
β |
VB |
Р |
VB |
В |
|
Рисунок 3 – Положение МЦС |
|
Ускорение любой точки М плоской фигуры можно |
||
определить двумя способами: |
|
|
1) С помощью полюса |
|
|
Ускорение |
aM точки М плоской фигуры равно векторной |
|
сумме ускорения aA какой-либо другой точки А, принятой за полюс, и ускорения aMA , которое точка М получает при вращении фигуры вокруг этого полюса:
aM = a A +aMA .
В случае, когда полюс А движется по кривой, его ускорение следует представить двумя составляющими
aА = aAτ + aAп .
Ускорение aMA , как и в случае вращения тела вокруг
неподвижной оси, состоит из касательной и нормальной составляющих:
aMA = aМn A + aМАτ ,
где aMAn = ω2 MA, aτMA = ε MA, ω, ε − угловая скорость и угловое ускорение при вращении тела вокруг полюса.
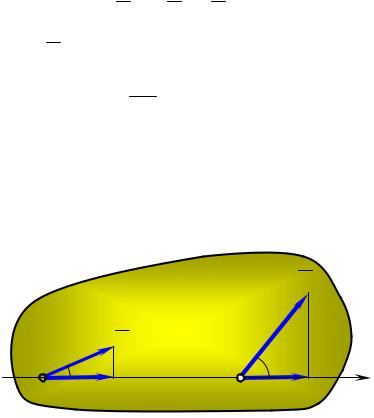
Если точка М, ускорение которой требуется определить, движется прямолинейно (рисунок 4), то её ускорение
aM = aAn + aАτ + aМn A + aМАτ , |
(а) |
Если точка М, движется не прямолинейно, то направление ее ускорения заранее неизвестно. В этом случае ускорение точки
также следует представить двумя составляющими aМ = aМτ + aМп и уравнение (а) примет вид
aМτ + aМn = aAτ + aAn + aМτ A + aМn A ,
аАτ А |
60° |
аАп |
у |
|
ε1 |
О1 аМ
аМ
аМАп  М аМАτ 30° х
М аМАτ 30° х
Рисунок 4 – Определение ускорения точки
2) С помощью мгновенного центра ускорений. Мгновенным центром ускорений называется геометрическая точкa Q, принадлежащая плоской фигуре (или ее мысленному

продолжению), ускорение которой в данный момент времени равно нулю.
Ускорение любой точки плоской фигуры определяется так, как будто плоская фигура совершает поворот относительно мгновенного центра ускорений (вокруг оси, проходящей через МЦУ, перпендикулярно плоскости движения)
aM = aMQ + aMQn + aMQτ .
Модуль ускорения точки М
aM = aMQ = QM  ω4 +ε2 .
ω4 +ε2 .
Этот способ является довольно трудоёмким, поэтому при решении задачи им пользуются редко.
Контрольные задания
Плоский механизм состоит из стержней 1, 2, 3, 4 и ползуна, соединённых друг с другом и с неподвижными опорами О1 и О2 шарнирами. Точка D находится в середине соответствующего стержня. Длины стержней равны, соответственно, l1 = 0,4 м, l2 = 1,2 м, l3 = 1,4 м, l4 = 0,6 м. Положение механизма определяется углами α, β, γ, δ, ϕ. Дуговые стрелки на рисунках показывают, как при построении чертежа механизма должны откладываться углы: по ходу или против хода часовой стрелки (например, угол γ на рисунке 5 рассматриваемого примера следует отложить от АВ против хода часовой стрелки).
Построение чертежа следует начинать со стержня, направление которого определяется углом α, ползун с направляющими для большей наглядности изобразить так, как показано в примере на рисунке 6.
Заданные угловую скорость и угловое ускорение считать направленным против хода часовой стрелки.
Определить скорость и ускорение точки В, угловые скорости стержней 2, 3, 4, а также угловое ускорение стержня АВ.
Студенты специальностей ЗТА, ЗТЖ, ЗГД, ЗЭЭ, ЗЭП определяют только скорость точки В и угловые скорости стержней
2, 3, 4.
Примечание – Номер варианта выбирается по сумме двух последних цифр шифра.
Методические указания
1.Построить механизм в масштабе в соответствии с заданными углами.
2.Построение следует начинать со стержня, направление вращения которого определяется углом α, ползун с направляющими для большей наглядности следует изобразить так, как показано в примере на рисунке 6.
3.Решение задачи следует начинать с определения скорости
иускорения точки А стержня О1А, так как заданы его угловая
скорость ω1 и угловое ускорение ε1.
4.Установить направление скорости точки другого стержня и определить его угловую скорость. Затем определить скорость точки, соединяющей этот стержень с последующим и т.д.
5.Показать на рисунке все векторы скоростей.
6.Определить ускорение точки В с помощью полюса. За полюс следует принимать точку А, ускорение которой найдено.
7.Выполнить отдельный рисунок, на котором начертить стержни О1А, АВ и ползун. Показать ускорения точек А и В.
Пример выполнения и оформления задачи
Механизм (рисунок 5) состоит из стержней 1, 2, 3, 4 и ползуна В, соединённых друг с другом и с неподвижными опорами О1 и О2 шарнирами.
Дано: α = 120°, β = 30°, γ = 30°, δ = 150°, φ = 90°, l2 = 1,2 м, l3 = 1,4 м, l4 = 0,6 м, AD = DB, ω1 = 2 c-1,
(направление ω1 и ε1 – против хода часовой стрелки).
Определить: VA, VE, aE, ω2, ω3, ω4, ε2, ε3.
РЕШЕНИЕ
l1 = 0,4 м,
ε1 = 7 c-2
Строим план механизма в соответствии с заданными углами (рисунок 4.6), на котором изображаем все векторы скоростей.
Определяем скорость точки В (VВ). Точка В принадлежит стержню АВ. Чтобы найти скорость необходимо знать скорость

какой-нибудь другой точки этого стержня и направление ω1. По данным задачи, учитывая направление угловой скорости, определяем скорость точки А
VA =ω1l1
E 4
4
 β
β
= 0,8 м/с, VA O1A. |
(1) |
О2 |
ϕ |
|
2 |
B |
γ
3
D
А δ 1
δ 1
α
 О1
О1
Рисунок 5 – Схема механизма
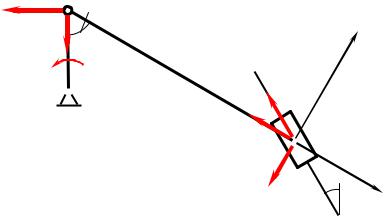
Направление VВ найдём, учитывая, что точка В принадлежит и ползуну, движущемуся вдоль направляющих поступательно. Зная VА и направление VВ воспользуемся теоремой о проекции
скоростей на прямую, проходящую через эти точки В (прямая АВ). Сначала, согласно этой теореме, устанавливаем, в какую сторону направлен вектор VВ (проекции скоростей должны иметь
одинаковые знаки). Затем, вычисляя эти проекции, находим
VBcos30° = VAcos60°, |
(2) |
откуда VВ = 0,46 м/с.
Определяем VЕ . Точка Е принадлежит стержню DE, следовательно, чтобы определить VЕ следует сначала определить скорость точки D, принадлежащей стержню АВ. Для этого, зная VА и VВ , строим мгновенный центр скоростей (МЦС) стержня АВ; это точка пересечения перпендикуляров к векторам VА и VВ , восстановленным из точек А и В (Р3). По направлению вектора VА
определяем направление угловой скорости стержня АВ (ω3) относительно МЦС. Вектор VD перпендикулярен отрезку Р3D и