

МУ ТМ_2015 / Статика Тема5 машиностроит. спец. (Михайленко, Живаго)
.pdfИнститут машиностроения и транспорта
Кафедра теоретической механики
СТАТИКА
Практикум
Тема 5. РАВНОВЕСИЕ ПРОСТРАНСТВЕННОЙ ПРОИЗВОЛЬНОЙ СИСТЕМЫ СИЛ
Для студентов машиностроительных специальностей
|
|
|
P |
у |
|
|
|
b |
Q |
|
|
c |
|
|
|
|
|
30º |
|
z |
|
|
|
|
|
|
|
|
|
а |
b |
В |
r |
|
|
|
|||
R |
30º |
|
|
|
|
G |
|
|
|
|
|
|
|
|
|
|
t |
|
|
А |
|
|
Т |
|
20º |
|
х |
|
|
|
|
|
|
Новокузнецк
2012
Министерство образования и науки РФ
Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования “Сибирский государственный индустриальный университет”
Кафедра теоретической механики
СТАТИКА
Тема 5. РАВНОВЕСИЕ ПРОСТРАНСТВЕННОЙ ПРОИЗВОЛЬНОЙ СИСТЕМЫ СИЛ
Практикум для выполнения самостоятельной работы
по дисциплине “Теоретическая механика”
Для студентов машиностроительных специальностей
Новокузнецк, 2012
УДК 531 (075) С 78
Рецензент:
Доктор технических наук, профессор, заведующий кафедрой сопротивления материалов и строительной механики СибГИУ А.Г. Никитин
С 78 Статика: Практикум. / Сиб. гос. индустр. ун-т; сост: Н.И. Михайленко, Э.Я. Живаго. – Новокузнецк, Изд. центр СибГИУ, 2012. – 38 с.
Изложены методические указания для выполнения расчетнографических работ по дисциплине “Теоретическая механика”, раздел “Статика”, излагается краткая теория, приведены варианты заданий и ответы к ним.

Тема 5. РАВНОВЕСИЕ ПРОСТРАНСТВЕННОЙ ПРОИЗВОЛЬНОЙ СИСТЕМЫ СИЛ
Систему сил называют произвольной пространственной,
если линии действия всех сил расположены произвольно в пространстве, т.е. не лежат в одной плоскости, не параллельны и не пересекаются в одной точке.
Любая произвольная система сил при приведении её к произвольному центру, приводится к одной силе, равной главному вектору, и паре сил, момент которой равен главному моменту
|
|
n |
|
|
|
|
n |
|
|
|
R |
O* = ∑ |
Fk , |
|
M |
O* = ∑mо ( |
Fk ) . |
||
|
|
k=1 |
|
|
k =1 |
||||
Для равновесия произвольной системы сил, необходимо и достаточно, чтобы главный вектор и главный момент равнялись нулю
|
|
n |
|
|
|
|
n |
|
|
|
R |
O* = ∑ |
Fk = 0, |
M |
O* |
= ∑mо ( |
Fk ) = 0 . |
||
|
|
k =1 |
k =1 |
||||||
На основании этих выражений записываются аналитические условия равновесия произвольной пространственной системы сил:
n |
n |
n |
|
|
|
|||
∑ X k = 0, |
∑Yk = 0, |
∑ Zk = 0, |
||||||
k =1 |
k =1 |
k =1 |
|
|
|
|||
n |
|
|
n |
|
|
n |
|
|
∑m x ( |
Fk ) = 0, ∑m у (Fk |
) = 0, ∑mz ( |
Fk ) = 0. |
|||||
k =1 |
k =1 |
|
|
k =1 |
||||
Для равновесия произвольной пространственной системы сил необходимо и достаточно, чтобы суммы проекций всех сил, приложенных к твердому телу, на оси декартовой системы координат, и алгебраические суммы моментов всех сил, относительно этих же осей, равнялись нулю.
Моментом силы F относительно оси называют алгебраический момент проекции этой силы на плоскость П,
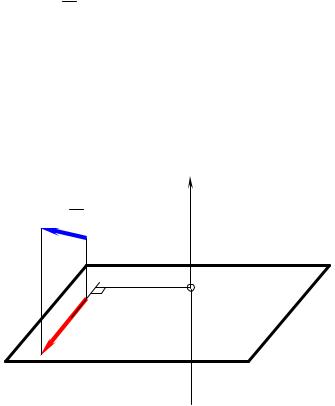
перпендикулярную оси, относительно точки пересечения оси с этой плоскостью.
Для нахождения значения момента силы относительно оси следует спроецировать силу на плоскость, перпендикулярную оси, и найти алгебраическое значение момента полученной проекции силы относительно точки пересечения оси с плоскостью (рисунок
1).
Mz (F ) = ±mO (Fп) = ±Fпh.
Момент силы относительно оси считается положительным, если с положительного направления оси видно стремление силы Fп повернуть тело или плоскость против хода часовой стрелки, и отрицательным – по ходу часовой стрелки. Здесь Fп – проекция вектора силы F на плоскость, перпендикулярную оси Oz.
z
F
h  О
О
FП
П
Рисунок 1 – Момент силы относительно оси
Момент силы относительно оси равен нулю, если
•линия действия силы пересекает ось (h = 0);
•сила параллельна оси (FП = 0).
Вычисление моментов силы относительно осей существенно упрощается, если применить теорему Вариньона о моменте равнодействующей: разложить силу на составляющие, параллельные осям координат и записать алгебраические суммы моментов относительно выбранных осей.
Для равновесия пространственной системы параллельных сил необходимо и достаточно, чтобы сумма проекций всех сил на одну
из координатных осей, параллельную силам, и алгебраическая сумма моментов этих сил относительно двух других осей, равнялись нулю.
n |
n |
|
|
n |
|
|
∑ Zk = 0 |
, то ∑m x ( |
Fk ) = 0, |
∑m у ( |
Fk ) = 0 . |
||
k=1 |
k=1 |
k=1 |
||||
Контрольные задания
Определить реакции связей и величину силы Р, при действии которых конструкция находится в равновесии.
Примечание – номер варианта выбирается по сумме двух последних
цифр шифра.
Методические указания
Для решения задачи необходимо изучить следующие вопросы:
1.Момент силы относительно оси. Вычисление главного вектора и главного момента системы сил.
2.Приведение пространственной системы сил к простейшему
виду.
3.Условия равновесия произвольной пространственной системы сил и, как частный случай, системы параллельных сил в пространстве.
При решении задач на равновесие системы сил целесообразно придерживаться следующей последовательности:
•Изобразить конструкцию на рисунке. Определить в каких точках, и какими внешними связями закреплена конструкция. Показать на рисунке реакции или составляющие реакций.
•Показать на рисунке все активные силы, действующие на
тело.
•Выяснить, является ли задача статически определённой.
•Написать условия равновесия для пространственной системы сил и составить уравнения равновесия.
•Вычислить значения реакций.
•Написать ответ, указав, правильно или неправильно выбраны первоначальные направления реакций или их составляющих.
Примеры выполнения и оформления задач
Задача 1. Определить реакции связей и величину силы Р, под действием которых конструкция находится в равновесии, если
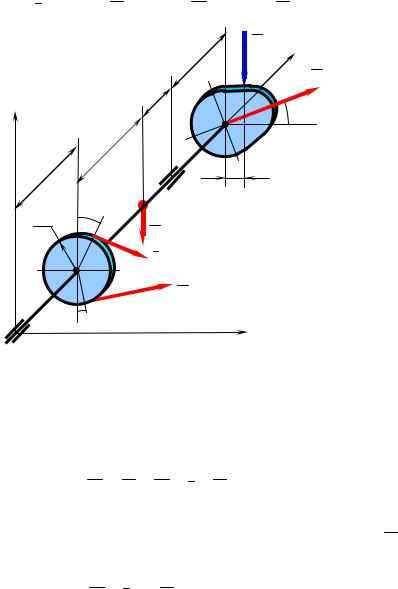
G = 2 кН, Q = 1 кН, T = 2t = 4 кН, а = 0,4 м, b = 0,3 м, c = 0,2 м, R = 0,2 м, r = 0,1 м, t Ay , T Ay, Q Ay , P || Аz (рисунок 2).
|
|
|
P |
у |
|
|
|
b |
Q |
|
|
c |
|
|
|
|
|
30º |
|
z |
|
|
|
|
|
|
|
|
|
а |
b |
В |
r |
|
|
|
|||
R |
30º |
|
|
|
|
G |
|
|
|
|
|
|
|
|
|
|
t |
|
|
А |
|
|
Т |
|
20º |
|
х |
|
|
|
|
|
|
Рисунок 2 – Схема задачи
Р Е Ш Е Н И Е
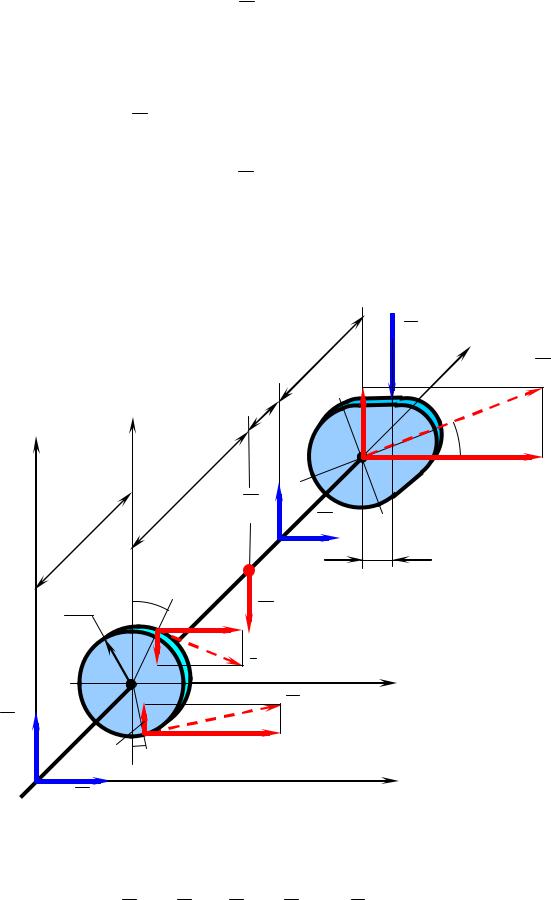
Рассмотрим равновесие конструкции, которая находится под действием активных сил G , Р, Q , t , T и закреплена в точках А и
В неподвижными цилиндрическими шарнирами, реакции которых представляем проекциями на оси координат RAx , RAz , RBx , RBz .
Изображаем конструкцию без связей, со всеми силами на рисунке 5.1.3. Для удобства силы Q , t и T раскладываем на составляющие Qx , Qz , tx , tz , Tx и Tz , параллельные осям координат Ох и Oz.
Так как система сил пространственная произвольная составим шесть уравнений равновесия:
n |
|
|
|
∑Fkx |
= 0 |
, |
(1) |
k =1 |
|
|
|
RAx +T cos 20°+ t cos 30°+ RBx +Q cos 30° = 0, |
|
||
n |
|
|
|
∑ Fkу = 0 , 0 |
≡ 0, |
(2) |
|
k =1 |
|
|
|
n |
|
|
|
∑Fkz |
= 0 |
, |
(3) |
k =1 |
|
|
|
RAz +T sin 20°− t sin 30°−G + RBz +Q sin 30°− P = 0 |
, |
||
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
∑mx (Fk ) |
= 0 |
, |
|
|
|
|
|
|
|
|
k =1 |
|
|
|
|
|
|
T sin 20°a − t sin 30°a −G(a + b) + RBz (a + b + c) + |
(4) |
|||||||||
|
+Q sin 30°(a + 2b + c) − P(a + 2b + c) = 0, |
|
||||||||
|
|
|
||||||||
|
n |
|
|
= 0 , −T R + t R + P r = 0, |
|
|
||||
|
∑ mу(Fk ) |
|
(5) |
|||||||
|
k =1 |
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∑mz (Fk ) |
= 0 |
, |
|
|
|
|
|
|
|
|
k =1 |
|
|
|
|
|
|
|
−T cos 20°a −t cos 30°а− RBx (a +b +c) − |
(6) |
||||||||
|
−Qcos 30°(a + 2b +c) = 0. |
|
|
|
||||||
|
|
|
|
|
||||||
|
|
|
|
|
|
|
b |
P |
у |
Q |
|
|
|
|
|
|
|
Qz |
|
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
|
z1 |
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
30º |
|
|
|
|
b |
|
|
|
|
|
Qx |
|
|
|
|
|
|
|
|
|
|
||
|
а |
|
|
|
RAz |
|
RВx |
|
|
|
|
|
|
|
|
В |
r |
|
|
||
|
|
|
|
|
|
|
|
|
||
|
R |
|
30º |
G |
|
|
|
|
|
|
|
|
|
tx |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
|
|
|
tz |
|
t |
|
|
х1 |
|
|
RAz |
|
|
|
|
|
Т |
|
|
|
|
|
Tz |
|
|
Tx |
|
|
|
|
|
|
А |
|
20º |
|
|
|
х |
|
|
||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
||
RAx
Рисунок 3 – Равновесие вала АB
Для вала составлено шесть уравнений равновесия, а искомых величин пять – RAx , RAz , RBx , RBz и Р , следовательно, задача статически определённая.

Решаем полученную систему уравнений. Из уравнения (5) определяем Р:
P = (T −rt)R = 4 кН.
Из уравнения (4) определяем RBz:
R = t sin 30°a −T sin 20°a +G(a + b) −Q sin 30(a + 2b + c) + |
||||||
Bz |
|
|
a + b + c |
|
|
|
|
|
|
|
|
||
|
|
+ |
P(a + 2b + c) |
= 6,06 кН. |
|
|
|
|
|
|
|
||
|
|
|
a + b + c |
|
|
|
Из уравнения (6) определяем RBx: |
|
|
||||
RBx = |
T cos 20°a + t cos 30°a +Qcos 30°(a + 2b +c) |
= 3,6 кН. |
||||
|
a +b +c |
|||||
|
|
|
|
|
||
Из уравнения (1) определяем RАx:
RAx = −T cos 20°− t cos 30°−Q cos 30° = −2,76 кН.
Из уравнения (3) определяем RАz:
RAz = t sin 30°−T sin 20°+G − RBz −Qsin 30°+ P = −0,93 кН.
Составляем проверочные уравнения моментов относительно осей х1 и z1 (рисунок 3) и решаем их:
n
∑mx1 (Fk ) = 0 ,
k =1
− RAza −G b + RBz (b +c) +Qsin 30°(2b +c) − P(2b +c) = 0, 0,93 0,4 − 2 0,3 + 6,06(0,3 + 0,2) +1 0,5(0,6 + 0,2) −4(0,6 + 0,2) = 0,
0 ≡ 0.
n
∑mz1 (Fk ) = 0 ,
k =1

RAx a − RBx (b +c) −Qcos 30°(2b +c) = 0,
− 2,76 0,4 + 3,6(0,3 + 0,2) −1 0,866(2 0,3 + 0,2) = 0,
0 ≡ 0.
Задача решена правильно.
Их полученных результатов видно, что составляющие реакций RAx , RAz , RBx имеют направления противоположные,
показанным на рисунке.
Определим реакции вала в подшипниках А и В:
RA = RAx + RAz ,
RA =  RAx2 + RAz2 =
RAx2 + RAz2 =  (−2,76)2 +(−0,93)2 = 2,91 кН.
(−2,76)2 +(−0,93)2 = 2,91 кН.
RB = RBx + RBz ,
RB =  RBx2 + RBz2 =
RBx2 + RBz2 =  3,62 + 6,062 = 7,05 кН.
3,62 + 6,062 = 7,05 кН.
Ответ: RA = 2,91 кН, RB = 7,05 кН.
Задача 2. Определить реакции связей и величину силы Р, при которых конструкция находится в равновесии, если Q = 3 кН,
G = 2 кН, α = 60°, β = 45°, a = 0,8м, b = 0,2 м, c = 0,6 м, R = 0,4м, r = 0,2 м (рисунок 4).
РЕШЕНИЕ:
Рассмотрим равновесие конструкции, состоящей из вала АВ со шкивом и барабаном.
Конструкция нагружена сосредоточенными активными силами P, Q ,G .
На вал наложены связи:
В точке А – подпятник, реакцию которого представим тремя составляющими X A ,YA , Z A , направленными параллельно выбранным осям координат.