

МУ ТМ_2015 / Статика Тема2 (Михайленко, Живаго)
.pdfИнститут машиностроения и транспорта
Кафедра теоретической механики
СТАТИКА
Практикум
Тема 2. РАВНОВЕСИЕ ПЛОСКОЙ ПРОИЗВОЛЬНОЙ СИСТЕМЫ СИЛ
2а |
B |
q |
|
2a |
a |
D |
|
M C |
|||
|
|||
|
|
||
|
β |
G |
|
А |
|
||
|
|
Новокузнецк
2012
Министерство образования и науки РФ
Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования “Сибирский государственный индустриальный университет”
Кафедра теоретической механики
СТАТИКА
Тема 2. РАВНОВЕСИЕ ПЛОСКОЙ ПРОИЗВОЛЬНОЙ СИСТЕМЫ СИЛ
Практикум для выполнения самостоятельной работы
по дисциплине “Теоретическая механика”
Новокузнецк, 2012
УДК 531 (075) С 78
Рецензент:
Доктор технических наук, профессор, заведующий кафедрой сопротивления материалов и строительной механики СибГИУ А.Г. Никитин
С78 Статика: Практикум. / Сиб. гос. индустр. ун-т; сост: Н.И. Михайленко, Э.Я. Живаго. – Новокузнецк, Изд. центр СибГИУ, 2012. – 26 с.
Изложены методические указания для выполнения расчетнографических работ по дисциплине “Теоретическая механика”, раздел “Статика”, излагается краткая теория, приведены варианты заданий и ответы к ним.
Тема 2. РАВНОВЕСИЕ ПЛОСКОЙ ПРОИЗВОЛЬНОЙ СИСТЕМЫ СИЛ
Систему сил называют плоской произвольной, если линии действия всех сил системы расположены произвольно в одной плоскости, т.е. не параллельны и не пересекаются в одной точке. Такие системы не всегда эквивалентны равнодействующей.
Для эквивалентного преобразования плоской произвольной системы сил используются понятия о моменте силы относительно центра, о паре сил, о параллельном переносе силы.
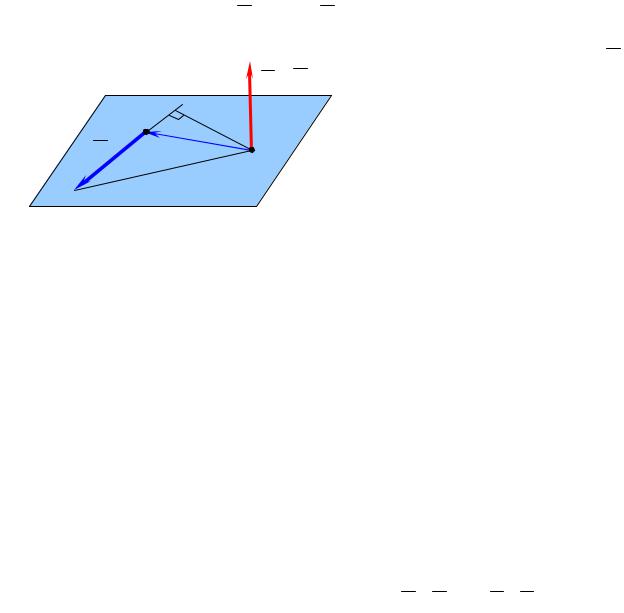
Алгебраическим моментом силы относительно произвольно выбранного центра (точки) О, называют взятое со знаком плюс или минус произведение модуля силы на плечо (рисунок 1)
|
|
|
MO (F )= mO (F )= ± F h. |
|
|
|
|||
|
|
|
|
тО(F) |
Плечом |
h |
силы |
F |
|
|
|
|
|
относительно |
выбранного |
||||
|
A |
r |
h |
|
центра О называют длину |
||||
|
|
перпендикуляра, |
|||||||
|
F |
|
|
O |
опущенного из центра О на |
||||
|
|
|
|
|
линию действия силы. |
|
|||
Рисунок 1 – Момент силы |
Момент |
|
силы |
||||||
считается положительным, |
|||||||||
|
|
|
|
|
|||||
если сила стремится поворачивать тело вокруг выбранного центра |
|||||||||
против хода часовой стрелки (cо стороны наблюдателя). |
|
|
|||||||
В |
инженерных |
расчётах |
встречаются |
|
нагрузки, |
||||
распределённые по тому или иному закону на какой-либо |
|||||||||
поверхности, в частности, равномерно распределённые вдоль |
|||||||||
отрезка прямой. В плоской системе сил распределённая нагрузка |
|||||||||
характеризуется её интенсивностью q, т.е. значением силы, |
|||||||||
приходящейся на единицу длины (рисунок 2). Эту равномерно |
|||||||||
распределённую нагрузку можно заменить сосредоточенной силой, |
|||||||||
которая равна Q = q a и приложена в середине отрезка АВ. |
|
|
|||||||
Парой сил называют систему двух равных по модулю |
|||||||||
противоположно направленных сил с параллельными линиями |
|||||||||
действия (рисунок 3). |
|
|
|
|
|
||||
Пару сил нельзя упростить, т.е. заменить одной силой – |
|||||||||
равнодействующей. Пару сил обозначают (F1 ; F2 ), (P1 ; P2 ) и т.д. |
|
||||||||
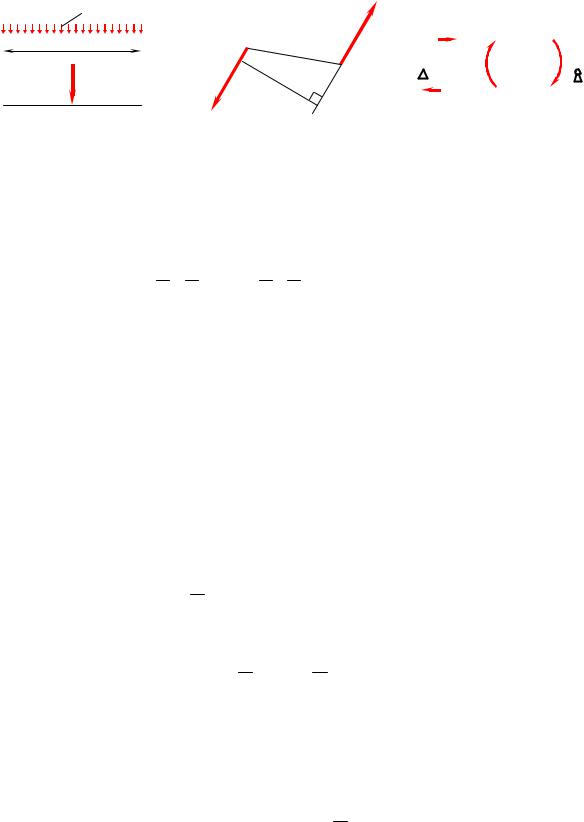
Пара сил характеризуется плоскостью действия, направлением вращения и моментом пары.
|
|
|
q |
|
|
|
|
|
|
|
|
|
|
|
|
А |
|
|
В |
А |
F2 |
М |
|
М |
|||||||
|
|
|
|
||||||||||||
|
|
а |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В |
|
|
|
|
|
|
|
|
Q |
|
|
F1 |
d |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||||||
A |
|
|
|
|
|
|
|
М |
|||||||
|
|
|
В |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Рисунок 2 |
|
|
|
Рисунок 3 |
|
|
|
|
|
|
Рисунок 4 |
|||
Алгебраический момент пары равен взятому со знаком плюс или минус произведению одной из сил пары на плечо пары. Плечом d пары называют кратчайшее расстояние между линиями действия сил пары (рисунок 3)
M(P1 , P2 )= m(P1 , P2 )= P1 d = P2 d .
Момент пары сил считается положительным, если пара стремится вращать тело против хода часовой стрелки. На расчетных схемах пару сил принято обозначать, как показано на рисунке 4.
Эквивалентное преобразование плоской произвольной системы сил сводится к её приведению к произвольно выбранному центру. Согласно теореме Пуансо произвольная плоская система сил, приложенная к твердому телу, эквивалентна одной силе
(главному вектору), приложенной в центре приведения, и одной паре сил (результирующая пара), момент которой называют главным алгебраическим моментом.
Главный вектор RO* системы равен векторной сумме всех сил системы
n
R * = ∑Fk .
O k=1
Главный алгебраический момент равен алгебраической сумме моментов всех сил системы относительно выбранного центра приведения
|
n |
|
M *O |
= ∑mO ( |
Fk ). |
|
k =1 |
|
Для равновесия плоской произвольной системы сил, приложенной к твердому телу, необходимо и достаточно, чтобы главный вектор и главный момент этой системы равнялись нулю
|
|
|
O* = 0 , |
M *O = 0 , т.е. |
|||
|
R |
||||||
n |
|
n |
|||||
∑ |
|
|
, ∑mO ( |
Fk )= 0 . |
|||
Fk = 0 |
|||||||
k=1 |
|
k =1 |
|||||
Модуль векторной суммы определяется через суммы проекций сил на выбранные оси координат
R*x |
n |
n |
R*y |
n |
n |
= ∑Fk х |
= ∑ Хk , |
= ∑Fky = ∑Yk , |
|||
|
k =1 |
k =1 |
|
k =1 |
k =1 |
RO* =  ∑( X k )2 + ∑(Yk )2 .
∑( X k )2 + ∑(Yk )2 .
Аналитические условия равновесия плоской произвольной системы сил можно записать в трёх формах. Основная:
n |
n |
n |
|
∑ Хk = 0, |
∑Yk = 0, |
∑mO ( |
Fk )= 0. |
k =1 |
k =1 |
k =1 |
|
Для равновесия плоской произвольной системы сил, приложенной к твердому телу, необходимо и достаточно, чтобы суммы проекций всех сил на две, произвольно выбранные координатные оси, и алгебраическая сумма моментов всех сил, относительно произвольно выбранной точки, равнялись нулю.
Кроме этой формы записи условий равновесия можно использовать еще две равнозначные формы. Вторая:
n |
n |
n |
||
∑ Хk = 0, |
∑m A ( |
Fk )= 0, |
∑mB ( |
Fk )= 0 . |
k =1 |
k =1 |
k =1 |
||
Прямая АВ не должна быть перпендикулярна выбранной оси. Третья форма записи уравнений равновесия:
n |
n |
n |
|||
∑m A ( |
Fk )= 0, |
∑mB ( |
Fk )= 0, |
∑mC ( |
Fk )= 0. |
k =1 |
k =1 |
k =1 |
|||
Моментные точки А, В и С не должны лежать на одной прямой.
В частном случае для плоской системы параллельных сил
достаточно двух условий равновесия:

n |
|
n |
|
|
∑ Хk = 0 |
, |
∑mO ( |
Fk ) = 0. |
|
k =1 |
|
k=1 |
||
Ось х направлена параллельно силам.
Существует и вторая форма условий равновесия системы параллельных сил:
n |
n |
||
∑m A ( |
Fk )= 0, |
∑mB ( |
Fk )= 0. |
k =1 |
k =1 |
||
Прямая АВ не должна быть параллельна силам.
При решении конкретных задач бывает сложно вычислить длину плеча какой-то силы. В таких случаях удобно силу
разложить на составляющие, параллельные осям и
воспользоваться теоремой Вариньона о моменте равнодействующей.
Момент равнодействующей системы сил относительно произвольной точки равен алгебраической сумме моментов сил системы относительно той же точки)
MO (R )= ∑n mO (Fk ).
k =1
Контрольные задания
Определить реакции связей балки АВ, изображенной на рисунке. Груз G подвешен на канате, перекинутом через блок D и прикрепленном к балке в указанной точке.
Примечание – Номер варианта выбирается по сумме двух последних цифр шифра.
Методические указания
Для решения задачи необходимо изучит следующие вопросы:
1.Проекции вектора силы на оси координат;
2.Алгебраический момент силы относительно произвольного
центра.
3.Пара сил. Алгебраический момент пары сил.
4.Основные виды связей, их реакции. Условные обозначения на рисунках. Принцип освобождаемости от связей.
5.Условия равновесия плоской произвольной системы сил.

При решении задач на равновесие плоской произвольной системы сил целесообразно придерживаться следующей последовательности:
•Выделить балку, равновесие которой требуется рассмотреть, Изобразить её на рисунке в масштабе. Определить, в каких точках, и какими связями удерживается балка в равновесии. Показать на рисунке реакции связей или их составляющие, предварительно выбрав оси координат. Одну из осей координат можно совместить с балкой или ее частью, если балка изогнута. Направления составляющих реакций выбираются произвольно, параллельно осям координат.
•Показать на рисунке активные нагрузки, действующие на
балку.
•Определить систему сил, приложенных к балке. Выяснить статическую определимость задачи.
•Записать условия равновесия для действующей системы сил и составить уравнения равновесия.
•Вычислить значения реакций связей и их составляющие.
•Написать ответ, указав, верно или неверно выбраны первоначальные направления реакций или их составляющих.
Примеры выполнения и оформления задач
Задача 1. Определить реакции связей балки АВ (рисунок 5). Исходные данные: G = 6 кН, М = 6 кН м, q = 2 кН/м, a = 1,5 м,
α = 30º, β = 60º.
Р Е Ш Е Н И Е
Рассмотрим равновесие балки АВ. Изобразим её на рисунке 6, заменив связи их реакциями. Балка в точке А закреплена неподвижным цилиндрическим шарниром, реакцию которого представим её составляющими в произвольном направлении, параллельно осям координат ХА и YА. В точке В балка
удерживается стержнем, реакцию которого RB направим вдоль
стержня в произвольном направлении.
Балка нагружена парой сил с моментом М, распределенной нагрузкой на участке СВ интенсивностью q, которую заменяем
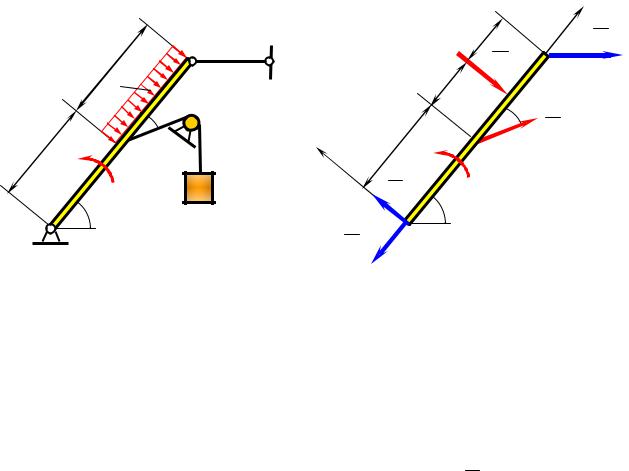
равнодействующей Q, приложенной в середине пролёта балки СВ, т.е. в точке Е и равной по величине
|
|
|
Q = q CB = 2·2а=6 кН. |
|
|
|
|
|
|
|
|
|
|
|
|
а |
х |
|
2а |
|
B |
|
|
|
RB |
|
|
|
|
|
|
Q |
|||
|
q |
|
|
|
а |
|
B |
|
|
|
|
|
|
|
|||
|
|
|
|
|
Е |
|
||
|
|
a |
D |
|
|
|
30° |
|
2a |
M |
C |
2a |
M |
C |
F |
||
|
|
|||||||
|
|
у |
|
|
|
|||
|
|
|
G |
|
|
|
|
|
|
β |
|
YA |
|
60° |
|
||
А |
|
|
|
|
|
|||
|
|
|
А |
|
|
|
|
|
|
|
|
|
X A |
|
|
|
|
Рисунок 5 – Схема задачи Рисунок 6 – Схема сил
Сила тяжести груза G передаётся по канату на балку в точке С. Заменяем её силой F, которая по величине равна F = G и направлена вдоль каната от балки, так как канат работает на растяжение.
Балка находится в равновесии под действием плоской произвольной системы сил, для решения которой достаточно трёх условий равновесия. Искомых сил также три ХА, YА и RB ,
следовательно, задача статически определённая.
Напишем условия равновесия плоской произвольной системы сил и составляем уравнения равновесия.
n
∑Fkx = 0, RB cos 60°+ F cos 30°− X A = 0, (1)
k =1
n |
− F sin 30°− RB sin 60°−Q = 0, |
(2) |
||
∑ Fky = 0, YA |
||||
k =1 |
|
|
||
n |
|
|
|
|
∑M A( |
Fk ) = 0, |
|
|
|
k =1 |
|
|
||
M − F AC sin 30°− RB AB sin 60°−Q AE = 0. |
(3) |
|||
Из уравнения (3) определяем RB
RB = M − F AC sin 30°−Q AE = −5,77 кН.
AB sin 60°
Из уравнения (2) определяем YА
YA = F sin 30°+ RB sin 60°+Q = 4 кН.
Из уравнения (1) определяем ХА
X A = RB cos 60°+ F cos 30° = 2,3 кН.
Составим проверочное уравнение:
n
∑MС (Fk ) = 0, M −Q CE − RBCB sin 60°−YACA = 0. (4)
k=1
Подставим в (4) значения всех величин
6 −6 1,5 −(−5,77) 3 0,866 −4 3 = 0, 0 ≡ 0.
Задача решена правильно.
Определим полную реакцию RA шарнира А:
RA = X A +YA , RA =  X A2 +YA2 =
X A2 +YA2 =  42 + 2,32 = 4,6 кН.
42 + 2,32 = 4,6 кН.
Ответ: RA = 4,6 кН, RB = – 5,77 кН.
Знак “минус” у реакции стержня В означает, что направление вектора RB противоположно направлению, принятому
первоначально. Стержень сжат.
Задача 2. Определить реакции связей ломаного стержня АСВ, изображенного на рисунке 7. В точке D закреплен канат, переброшенный через блок K и несущий на конце тело G.
Дано: G = 4 кН, М = 6 кН·м, q = 3 кН/м, АС = BD = 2 м,
СD = 1 м, α = 30°, β = 60°.
Определить: RA и RB .
РЕШЕНИЕ
Изображаем ломаный стержень без связей (рисунок 8). Стержень нагружен сосредоточенной силой T = G , парой сил с