

МУ ТМ_2015 / Кинематика Т.1 (Живаго, Желтухин, Ермаченко)
.pdfМинистерство образования и науки Российской Федерации
Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования
«Сибирский государственный индустриальный университет»
Кафедра технической механики и графики
КИНЕМАТИКА ТЕМА 1. КИНЕМАТИКА ТОЧКИ
Методические указантя по выполнению расчетно-графических работ
по дисциплине «Теоретическая механика» для студентов очной формы обучения
Новокузнецк
2014
УДК 378. 147 К41
Рецензент доктор технических наук, профессор, зав. кафедрой
автомобильного транспорта и технологических машин СибГИУ А.Г. Никитин
К41 Кинематика. Тема 1. Кинематика точки : метод. указ. /Сиб. гос. индустр. ун-т. ; сост. : Э.Я. Живаго, Д.В. Желтухин, М.В. Ермаченко. – Новокузнецк : Изд. центр СибГИУ, 2014. – 44 с.
Включают краткую теоретическую часть, примеры решения задач, рекомендации для выполнения самостоятельной работы, 25 вариантов индивидуальных комплексных заданий по 6 задач в каждом варианте.
Рекомендуются для студентов очной формы обучения.
2

КИНЕМАТИКА
Кинематикой называется раздел механики, в котором изучается движение материальных объектов с геометрической точки зрения, т.е. без учета их массы и действующих на них сил.
При изучении раздела выделяются кинематика точки и кинематика твердого тела.
Тема 1. КИНЕМАТИКА ТОЧКИ
Изучение движения точки заключается в определении характеристик её движения: положения точки в заданный момент времени в выбранной системе координат, траектории движения, скорости и ускорения.
Траекторией точки называется геометрическое место последовательных (с течением времени) положений её в пространстве, определяемое в той или иной системе отсчёта.
Кинематически задать движение (закон движения) точки – значит задать ее положение относительно выбранной системы координат в любой момент времени. Математические выражения, определяющие положение точки в любой момент времени в выбранной системе координат, называются уравнениями движения (законами движения) точки. Зная закон движения, можно определить основные кинематические характеристики движения.
Существует три основных способа задания движения точки: векторный, координатный и естественный.
При векторном способе задания движения положение точки задается её радиус-вектором r , как функцией времени, проведенным из какого-то неподвижного центра. Уравнение движения записывается в виде
r r(t).
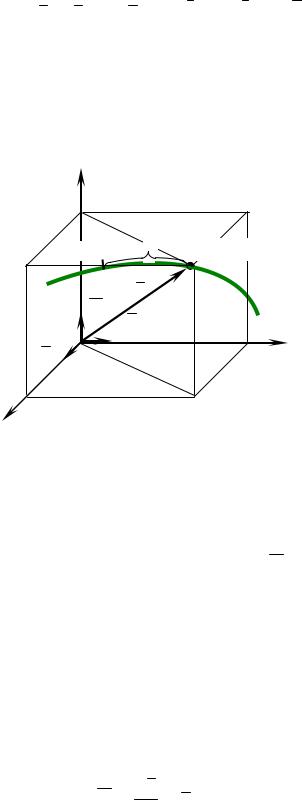
При координатном способе задания движения положение точки определяется её координатами в прямоугольной декартовой системе (рисунок 1). Координаты являются функциями времени, и уравнения движения точки записываются в виде
x x(t), у у(t), z z(t).
3
Очевидна связь между векторным и координатным способами задания движения
r r (t), r x i у j z k .
При естественном способе задания движения положение точки на заданной траектории определяется её дуговой координатой S S t (рисунок 1).
Задается начало отсчета (точка О1), положительное и отрицательное направления отсчёта дуговой координаты.
|
z |
|
|
|
|
|
(−)O1 (+) |
S |
М(х,у,z) |
||||
|
|
k |
r |
|
zM |
|
|
O |
j |
|
у |
||
i |
|
|
|
|||
|
уМ |
|
|
xМ |
||
х |
|
|
|
|
||
|
|
|
|
|
|
|
Рисунок 1 – Естественный способ задания движения точки
Основными кинематическими характеристиками движения точки являются её скорость и ускорение. Это векторные величины имеющие размерности, соответственно, м/с и м/с2.
Скоростью точки называется вектор V , определяющий в каждый момент времени быстроту изменения положения и направление движения точки в выбранной системе отсчёта.
Вектор скорости точки в данный момент времени направлен по касательной к траектории (рисунок 2). При прямолинейном движении вектор скорости совпадает с траекторией и направлен в сторону движения.
При векторном способе задания движения скорость точки определяется как первая производная по времени от радиус-вектора
V ddrt r .
При координатном способе задания движения скорость определяется через проекции вектора скорости на выбранные координатные оси
4

VVx i V у j Vz k , Vx dxdt x, V у ddуt у, Vz dzdt z .
Проекция вектора скорости на координатную ось равна
алгебраическому значению первой производной по времени от соответствующей координаты точки.
Численное значение скорости определяется геометрическим сложением
V = V  Vx2 V у2 Vz2 .
Vx2 V у2 Vz2 .
При естественном способе задания движения числовое (или алгебраическое) значение скорости точки определяется как первая производная по времени от дуговой координаты
V dSdt S .
a
V
n |
a |
aп
п
Рисунок 2 – Скорость и ускорение точки
Ускорение точки a характеризует быстроту изменения вектора скорости по величине и направлению.
Вектор ускорения точки находится в соприкасающейся плоскости траектории точки, т.е. в плоскости М n (рисунок 2), и направлен в сторону вогнутости траектории. При прямолинейном движении вектор ускорения совпадает с траекторией движения точки.
При векторном способе задания движения ускорение точки равно или первой производной по времени от вектора скорости точки, или второй производной по времени от радиус-вектора точки
a ddVt V r .
5

При координатном способе задания движения ускорение точки определяется через проекции вектора ускорения на выбранные координатные оси
a ах· i + ау· j + аz· k ,
ах = Vx x , ау = V у у, аz =Vz z , а = a  a x2 a 2у a z2 .
a x2 a 2у a z2 .
При естественном способе задания движения ускорение точки проецируется на оси естественного трехгранника – на касательную ось М и на главную нормаль Мn (рисунок 2)
a a an n или a a an ,
где и n − единичные векторы касательной и главной нормальной осей естественного трёхгранника.
Проекция ускорения точки на касательную ось a (касательное
ускорение) равна первой производной по времени от числового значения скорости точки или второй производной по времени от дуговой координаты точки и характеризует изменение скорости по
величине a V S .
Проекция ускорения на главную нормальную ось an (нормальное ускорение) характеризует изменение вектора скорости
по направлению и определяется выражением an V 2 , где - радиус
кривизны траектории в данной точке.
Так как a |
a |
n |
, то а = |
a 2 |
a 2 . |
|
|
|
|
n |
|
Если V S и a =V S имеют одинаковые знаки, то векторы |
|||||
|
|
|
|
|
|
V и a направлены в одну сторону, и движение точки будет ускоренным. В противном случае – движение точки замедленное.
Примеры выполнения и оформления задач
Задача 1. По заданным уравнениям движения точки М установить вид ее траектории и для момента времени t = 1 с, определить положение точки на траектории, ее скорость, полное, касательное и нормальное ускорения, а так же радиус кривизны траектории.
6
Исходные данные: x 2cos 4t см, y 1 4sin 4t см, t = 1c.
Найти: у = (x); x; у; Vx; Vу; V; ax; aу; a; a ; an; .
РЕШЕНИЕ:
1) Определяем траекторию точки М и её положение в данный момент времени.
Выражаем синус и косинус функции 4t , возводим их в квадрат и складываем. Получаем функцию:
x 2 |
|
( y 1)2 |
1. |
|
4 |
16 |
|||
|
|
Траекторией точки является эллипс в пределах - 2 х 2 ,
-3 у 5 (рисунок 3). При t = 1 c
х= 2 cos 4 1,4 см, у = 1 4sin 4 = 3,8 см.
2)Определяем скорость точки:
Вектор скорости V Vx i V y j . Проекции вектора скорости:
Vx x 2 sin 4t , V y = y cos 4t ,
при t = 1 c
Vx 12 0,7 1,1 см/с; Vy 0,7 2,2 см/с.
Модуль вектора скорости
V  Vx2 Vy2
Vx2 Vy2  ( 1,1)2 2,22 2,5см/с.
( 1,1)2 2,22 2,5см/с.
7

|
|
|
|
n |
|
|
|
|
|
|
|
|
- 3 |
|
|
|
|
|
|
|
|
|
- 2 |
|
|
an |
|
|
|
|
|
|
- 1 a |
|
3 a x 4 5 |
6 |
|
у |
|
- 3 |
- 2 |
- 1 |
0 |
1 |
2 |
Vx |
|
V |
|
|
|
|
|
a y |
|
|
|
||
|
|
|
1 |
|
M |
|
Vу |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
aτ |
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
х |
|
|
|
|
|
|
|
Рисунок 3 – Скорость и ускорения точки |
|
|||||||
Вектор скорости строим по его составляющим, параллельным координатным осям V Vx i Vy j (рисунок 3).
3) Определяем ускорение точки.
Вектор ускорения a a x i a y j . Проекции вектора ускорения:
|
|
2 |
|
t |
|
|
2 |
|
t |
|
a x Vx |
|
cos |
|
, a y V y |
|
sin |
|
. |
||
x |
8 |
4 |
y |
4 |
4 |
|||||
При t = 1 c, ax 0,86 см/с2, a y 1,72 см/с2. |
|
|
|
|||||||
Модуль ускорения
a  ax2 a2y
ax2 a2y  ( 0,86)2 ( 1,72)2 1,93 см/с2.
( 0,86)2 ( 1,72)2 1,93 см/с2.
Строим вектор ускорения по его составляющим, параллельным координатным осям (рисунок 1.3).
4) Касательное и нормальное ускорения.
Величину касательного ускорения находим по формуле
a |
Vх aх Vу a у |
|
( 1,1) ( 0,86) 2,2 ( 1,72) |
1,1 |
2 |
|
|
|
|
|
см/с . |
||
|
|
|
||||
|
|
V |
|
2,5 |
|
|
|
|
|
|
|
||
Знак ''–'' показывает, что касательное ускорение не совпадает по направлению с вектором скорости (замедленное движение).
Находим величину нормального ускорения
8
a |
n |
|
a2 a2 |
|
1,932 ( 1,1)2 |
1,58 см/с2. |
|
|
|
|
|
|
5)Радиус кривизны траектории
V 2 2,52 4,2 см. an 1,58
Результаты вычислений сведены в таблицу 1.
|
Таблица 1. |
|
|
|
|
|
|
|
|
||
Координаты, |
Скорость, |
|
Ускорение, |
|
, |
||||||
|
см |
|
см/с |
|
|
ax |
см/с2 |
|
|
см |
|
х |
|
у |
Vx |
Vy |
V |
ax |
aп |
a |
a |
|
|
1,4 |
|
3,8 |
1,1 |
2,2 |
2,5 |
0,86 |
1,72 |
1,58 |
1,1 |
1,93 |
4,2 |
Задача 2. По заданным уравнениям движения точки М установить вид ее траектории и для момента времени t = 1с найти положение точки на траектории, ее скорость, полное, касательное и нормальное ускорения, а так же радиус кривизны траектории.
Исходные данные: x t 3 см, |
y sin |
t 3 |
см, t = 1 c. |
|
3 |
||||
|
|
|
Найти: у = (x); x; у; Vx; Vу; V; ax; aу; a; a ; an; .
РЕШЕНИЕ
1) Определяем траекторию точки и её положение в данный момент времени методом избавления от параметра времени
y sin 3x .
Траекторией точки является часть синусоиды в пределах 0 х , - 1 у 1 (рисунок 4).
При t = 1 c, y = sin |
t 3 |
|
0,866 см, |
x = t 3 |
= 1 см. |
||||||||||
3 |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
2) Определяем скорость точки М: |
|
|
|
|
|
||||||||||
Вектор скорости |
|
|
Vx |
|
V y |
|
. |
|
|
|
|
|
|||
V |
i |
j |
|
|
|
|
|
||||||||
Проекции вектора скорости: |
|
|
|
|
|
t 3 |
|
||||||||
Vx = |
|
|
|
2 |
, V y |
|
t |
2 |
cos |
, |
|||||
x 3t |
|
y |
|
3 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
9

при t = 1 c, |
Vx |
3 см/с, |
Vy |
0,5 1,57 см/с. |
|
||
у |
|
|
V |
|
|
|
|
|
Vу |
aτ |
|
|
|
|
|
1 |
Vx |
|
|
|
|
||
M |
|
ах |
|
|
|
||
0 |
|
|
|
|
|
|
х |
|
|
|
3 |
4 |
5 |
6 |
|
|
|
|
|
||||
- 1 |
ау |
|
an |
a |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
п |
|
|
|
|
|
|
Рисунок 4 – Решение задачи 2 |
|
||||
Модуль вектора скорости
V Vx2 |
Vy2 |
32 1,572 3,39 см/с. |
Вектор скорости строим по его составляющим, параллельным |
||
координатным осям V 1 |
Vx1 i V y1 j (рисунок 4). |
|
3) Определяем ускорение точки.
Вектор ускорения a a x i a y j . Проекции вектора ускорения:
|
|
|
|
|
|
|
|
|
t 3 |
2 |
4 |
t 3 |
|
||
a x Vx |
|
6t , a y V y |
|
|
|
t |
sin |
|
. |
||||||
|
x |
y 2 t cos |
|
3 |
3 |
||||||||||
При t = 1 c, ax |
6 см/с2, |
|
a y |
6,73 см/с2. |
|
|
|
|
|||||||
Модуль ускорения |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
a |
ax2 a2y |
|
|
62 ( 6,73)2 |
9,01 см/с2. |
|
|
||||||
Строим вектор ускорения по его составляющим, параллельным |
|||||||||||||||
координатным осям (рисунок 4). |
|
|
|
|
|
|
|
|
|||||||
4) Касательное и нормальное ускорения. |
|
|
|
|
|
||||||||||
Величину касательного ускорения находим по формуле |
|
||||||||||||||
a |
Vх aх |
Vу a у |
|
3 6 1,57 ( 6,73) |
2,2 см/с2 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
V |
|
|
|
|
3,39 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
10