

МУ ТМ_2015 / Сб. заданий по теоретич. механике Кинематика (Дрожжин, Баранова, Дадочкина и др)
.pdfФедеральное агентство по образованию
Государственное образовательное учреждение высшего профессионального образования
«Сибирский государственный индустриальный университет»
Сборник заданий по теоретической механике
Кинематика
Допущено Министерством образования и науки Российской Федерации в качестве учебного пособия
для студентов высших учебных заведений, обучающихся по направлениям подготовки и специальностям в области техники и технологии
Новокузнецк 2008

УДК 531 (075) С 232
Рецензенты:
Доктор технических наук, профессор, заведующий кафедрой теоретической механики Сибирского государственного университета путей сообщения
А.М.Попов; Доктор технических наук, профессор кафедры теоретической
механики и теории механизмов и машин Ижевского государственного технического университета
А.Э.Пушкарев
Дрожжин В.В., Баранова Г.Т., Дадочкина Т.Н., ЖивагоЭ.Я., Крестьянова Н.И., Михайленко Н.И., Черников В.А.
С 232 Сборник заданий по теоретической механике. Кинематика: учебное пособие для студентов технических вузов / под редакцией В.В. Дрожжина. – Новокузнецк, 2008. – 144 с.
ISBN 5-7806-0241-7
Сборник заданий включает четыре основные темы кинематики. По каждой теме предлагается краткая теоретическая часть, примеры решения задач, рекомендации по решению, 25 вариантов индивидуальных комплексных заданий по 5 – 7 задач в каждом варианте, расположенных по возрастающей сложности.
Рекомендуется для студентов высших технических учебных заведений.
УДК 531 (075)
ISBN 5-7806-0241-7 Дрожжин В.В. и др., 2008
Сибирский государственный индустриальный университет, 2008
2

ПРЕДИСЛОВИЕ
Теоретическая механика как одна из естественных физикоматематических дисциплин занимает важное место в подготовке инженеров любой специальности. Для хорошего усвоения курса необходимо приобрести твердые навыки в решении конкретных задач, поэтому в учебных планах вузов выделяется достаточно большое количество часов на самостоятельную работу. Эти часы должны использоваться с максимальной эффективностью как во время аудиторных занятий, так и вне их.
Кафедра теоретической механики Сибирского государственного индустриального университета (ранее Сибирский металлургический институт, г. Новокузнецк) более 20 лет как отступила от «классической» формы проведения практических занятий. Каждое занятие начинается с письменного опроса по разработанным кафедрой тестовым заданиям с целью оценки подготовленности студентов по теме занятия (6 – 8 минут). Затем преподаватель решает ряд типовых задач, после чего студенты работают самостоятельно, выполняя индивидуальные задания в учебные часы или во внеурочное время. Такой метод работы потребовал разработки индивидуальных многовариантных заданий по каждой теме. Со временем задания видоизменялись, перерабатывались, дополнялись, и было принято решение о целесообразности объединить задания по темам в единый сборник индивидуальных заданий.
В сборник включены задания по основным темам кинематики. В каждой теме даѐтся краткая теоретическая часть, рекомендации по решению задач, примеры и варианты заданий. Задания и задачи в каждом разделе сборника имеют свой числовой шифр. Первая цифра шифра соответствует порядковому номеру подраздела (темы) в каждом разделе, второе число – номер варианта задания, третья цифра – номер задачи в задании.
Часть задач подобрана из существующих учебных пособий без изменения или с частичными изменениями, часть составлена авторами сборника.
Сборник заданий подготовлен коллективом преподавателей кафедры теоретической механики СибГИУ. Авторы выражают признательность бывшим сотрудникам кафедры: Ш.Г. Володарской, К.С. Горбунову, Е.П. Лаптевой, В.В. Соину, Я.Ф. Чудаеву,
 М.А. Шинкареву, которые в свое время принимали участие в подготовке заданий по некоторым темам.
М.А. Шинкареву, которые в свое время принимали участие в подготовке заданий по некоторым темам.
Авторы выражают надежду, что предлагаемый сборник заданий будет полезен при организации самостоятельной работы студентов технических вузов, готовящих специалистов различных направлений, как дополнение к существующим учебным пособиям.
3
1 КИНЕМАТИКА ТОЧКИ
Кинематикой называется раздел механики, в котором изучается движение материальных объектов с геометрической точки зрения, т.е. без учета их массы и действующих на них сил.
При изучении раздела выделяются кинематика точки и кинематика твердого тела.
Изучение движения точки заключается в определении характеристик еѐ движения: положения точки в заданный момент времени в выбранной системе координат, траектории движения, скорости и ускорения.
Траекторией точки называется геометрическое место последовательных (с течением времени) положений еѐ в пространстве, определяемое в той или иной системе отсчѐта.
Кинематически задать движение (закон движения) точки – значит задать ее положение относительно выбранной системы координат в любой момент времени. Математические выражения, определяющие положение точки в любой момент времени в выбранной системе координат, называются уравнениями движения (законом движения) точки. Зная закон движения, можно определить основные кинематические характеристики движения.
Существует три основных способа задания движения точки: векторный, координатный и естественный.
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
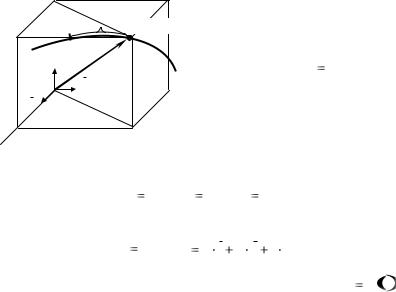
При |
векторном |
способе за- |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
дания движения положение точки |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
задается |
еѐ радиус-вектором |
|
, |
||||||||
|
zM |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
как функцией времени, проведен- |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
O1 (+) |
S |
|
|
|
|
|
М(х,у,z) |
|
ным из какого-то неподвижного |
||||||||||||||||
|
|
(−) |
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
центра. Уравнение движения за- |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
писывается в виде |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r r( t ) . |
|
|
|
|
|||||||||
|
|
|
|
k |
j |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При |
координатном |
способе |
|||||||||||
|
O |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
у |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
уМ |
|
|||||||||||||||
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
задания |
|
движения |
положение |
|||||||||||
xМ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
точки определяется еѐ координа- |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
тами в |
прямоугольной декарто- |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
х |
|
|
|
Рисунок 1.1 |
|
|
|
|
вой |
системе координат (рисунок |
|||||||||||||||||||
|
|
|
|
|
|
|
|
1.1). Координаты являются функ- |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
циями времени, и уравнения движения точки записываются в виде: |
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
x( t ), у у( t ), z |
z( t ) . |
|
|
|
|
|||||||||
|
Очевидна связь между векторным и координатным способами зада- |
||||||||||||||||||||||||||||
ния движения: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( t ), |
|
|
x i у j z k . |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
r |
r |
|
|
|
|
||||||||||
|
При естественном способе задания движения положение точки на |
||||||||||||||||||||||||||||
заданной траектории определяется еѐ дуговой координатой S |
S t |
(рису- |
|||||||||||||||||||||||||||
нок 1.1). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
4

Задается начало отсчета (точка О1), положительное и отрицательное направления отсчѐта дуговой координаты.
Основными кинематическими характеристиками движения точки являются еѐ скорость и ускорение. Это векторные величины имеющие размерности, соответственно, м/с и м/с2.
Скоростью точки называется вектор V , определяющий в каждый момент времени быстроту и направление движения точки в выбранной системе отсчѐта.
Вектор скорости точки в данный момент времени направлен по касательной к траектории (рисунок 1.2). При прямолинейном движении вектор скорости совпадает с траекторией и направлен в сторону движения.
При векторном способе задания движения скорость точки определяется как первая производная по времени от радиус-вектора:
|
|
|
|
|
|
|
|
|
|
dr |
|
r . |
|
V |
|
|||||
|
dt |
|
||||
|
|
|
|
|
||
При координатном способе задания движения скорость определяется через проекции вектора скорости на выбранные координатные оси:
|
|
|
|
|
|
|
dx |
x , Vу |
dу |
у , Vz |
dz |
z . |
|
V Vx |
i V у j Vz |
k , Vx |
|||||||||||
|
|
|
|||||||||||
dt |
dt |
dt |
|||||||||||
|
|
|
|
|
|
|
|
|
|
||||
Проекция вектора скорости на координатную ось равна алгебраическому значению первой производной по времени от соответствующей координаты точки.
Численное значение скорости определяется известным образом:
V = |
|
|
V 2 |
V 2 |
V 2 . |
V |
|||||
|
|
|
x |
у |
z |
При естественном способе задания движения числовое (или алгебраическое) значение скорости точки определяется как первая производная по времени от дуговой координаты:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dS |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
|
dt |
S . |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ускорение точки |
|
характеризует бы- |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
a |
строту |
изменения вектора скорости по величине |
|||||||||||||||||
|
|
|
|
|
|
V |
и направлению. |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
М |
|
Установлено, что вектор ускорения точки |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
находится в соприкасающейся плоскости траек- |
||||||
|
|
|
тории точки, т.е. в плоскости М n (рисунок 1.2), и |
||||||||||||||||
n |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
a |
|
направлен в сторону вогнутости траектории. При |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
n |
прямолинейном движении вектор ускорения сов- |
||||||||||||||
a |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
падает с траекторией движения точки. |
||||||
|
|
|
|
|
|
n |
|
При векторном способе задания движе- |
|||||||||||
|
|
|
|
|
Рисунок 1.2 |
ния ускорение точки равно или первой производ- |
|||||||||||||
ной по времени от вектора скорости точки, или второй производной по времени от радиус-вектора точки:
5

|
|
|
|
|
|
|
|
|
|
dV |
|
|
|
|
|
|
|
|
|
||||
a |
|
dt |
|
V |
r . |
||
|
|
|
|
|
|
||
При координатном способе задания движения ускорение точки определяется через проекции вектора ускорения на выбранные координатные оси:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
ах· i + ау· j + аz· k , |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
ах = Vx |
x |
, ау = V |
у |
у |
, аz =Vz |
z , а = |
a |
|
ax |
a у |
az . |
|||
|
|
|
|
|
|
|
|
2 |
2 |
2 |
|
|||
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При естественном способе задания движения ускорение точки проецируется на оси естественного трехгранника – на касательную ось М и на главную нормаль Мn (рисунок 1.2):
и на главную нормаль Мn (рисунок 1.2):
a a an n или a a
an n или a a an ,
an ,
где  и n − единичные векторы касательной и главной нормальной осей естественного трѐхгранника.
и n − единичные векторы касательной и главной нормальной осей естественного трѐхгранника.
Проекция ускорения точки на касательную ось a (касательное уско-
рение) равна первой производной по времени от числового значения скорости точки или второй производной по времени от дуговой координаты точки
и характеризует изменение скорости по величине: a |
V |
S . |
|
|
|
Проекция ускорения на главную нормальную ось a n (нормальное
ускорение) характеризует изменение вектора скорости по направлению и определяется выражением:
|
V 2 |
|
a n |
|
, |
|
||
где - радиус кривизны траектории в данной точке.
|
|
|
|
a2 an2 . |
||||
Так как |
a |
|
|
a |
n , то а = |
|
||
Если V S |
и |
a =V |
S |
имеют одинаковые знаки, то векторы V |
и |
|||
|
|
|
|
|
|
|
|
|
a направлены в одну сторону, и движение точки будет ускоренным. В противном случае - движение точки замедленное.
Пример 1. Точка движется по окружности по закону S = 5 + 2t3 (S – см, t – c). Определить ускорение точки в момент времени, когда еѐ скорость равна 24 см/с, нормальное ускорение 24 см/с2. Чему равен радиус окружности
(рисунок 1.3)? Определить характер движения точки. |
|
|
||||||||||
|
|
|
|
|
М |
|
|
|
Решение. |
|
||
|
|
|
|
|
|
|
|
|
|
|
||
a n |
|
|
Определяется скорость и касатель- |
|||||||||
|
|
|
|
|||||||||
R |
|
a |
|
|
ное ускорение точки: |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||
О |
|
|
|
|
|
|
V S |
6t 2 , a |
= V |
12t . |
||
|
|
V |
||||||||||
|
|
a |
|
|
V = 24 = 6t2, t = 2 c, a = 24 cм/с2. |
|||||||
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
||||
Рисунок 1.3 |
|
|
|
|
|
|
|
6 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|

Нормальное ускорение определяется по выражению:
a |
|
= |
V 2 |
, |
a |
|
= 24 см/с2, R |
V 2 |
= |
242 |
|
24 см. |
||||||
n |
|
n |
|
|
|
|
||||||||||||
|
|
R |
|
|
|
|
|
an |
24 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
Ускорение точки a |
a |
|
an , |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
a = a2 |
|
an2 |
242 242 |
|
24 2 см/с2. |
|||||||||||
Движение точки криволинейное ускоренное.
Пример 2. По заданным уравнениям движения точки М установить вид еѐ траектории и для момента времени t1 найти положение точки на траектории, скорость, ускорение, его касательную и нормальную составляющие, а так же радиус кривизны траектории в данной точке.
|
|
|
|
Дано: x |
|
|
2sin |
|
|
t |
|
см, |
y 2 2 cos |
t |
см, t1 = 1c. |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
6 |
3 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
Найти: у = f(x), xМ, уМ, Vx, Vу, V, ax, aу, a, a , an, . |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Решение. |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1) Определяем уравнение тра- |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ектории точки, и еѐ положение в |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
данный момент |
времени. Решая |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
совместно уравнения движения и |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
преобразуя второе уравнение, по- |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
лучаем: |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 t |
|
|
|
|
t |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
y |
2 |
2 (1 2sin |
) |
4 sin |
2 |
, |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Vy |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
|
6 |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
т.е. у = х2. |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Траекторией |
|
точки |
является |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
часть параболы у = х2, ограничен- |
||||||||||||||
|
|
|
|
|
|
|
|
|
an |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
ная неравенствами − 2 |
|
х |
|
2 , |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
у |
4 (рисунок 1.4). |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Vx |
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a x |
|
|
|
|
M |
|
|
|
|
|
При t = 1 c хМ = 2 sin |
|
= 1 см, |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
6 |
||||||||||||
-2 |
|
|
-1 |
|
|
|
|
|
|
O |
|
|
|
1 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
Рисунок 1.4 |
|
|
|
|
|
|
|
|
|
уМ = 2 – 2 cos |
|
|
= 1 см. |
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2) |
Скорость |
точки. |
|
Вектор |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
скорости V |
|
|
Vx |
i Vy |
|
|
j . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
Проекции вектора скорости на выбранные оси:
V |
dx |
x |
|
|
|
cos |
t |
, V |
|
dy |
|
y |
2 |
|
sin |
t |
. |
||||||
|
|
|
|
|
|
y |
|
|
|
|
|
|
|||||||||||
x |
|
3 |
|
6 |
|
dt |
3 |
|
3 |
|
|||||||||||||
|
dt |
|
|
|
|
|
|
||||||||||||||||
При t = 1c Vx |
|
|
3 |
|
≈ 0,96 см/с, Vy |
|
|
3 |
|
|
≈ 1,813 см/с. |
||||||||||||
|
6 |
|
|
|
3 |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
7
Модуль скорости: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
15 |
2,027см/с. |
|||
V |
V 2 |
V 2 |
||||||
|
|
|||||||
|
x |
y |
6 |
|
|
|||
|
|
|
|
|
||||
Вектор скорости строится по еѐ составляющим, параллельным координатным осям, в выбранном масштабе (рисунок 1.4).
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
3. Ускорение точки. |
Вектор ускорения a |
|
ах· i + ау· j . |
|||||||||||||||||
Проекции вектора ускорения на оси: |
|
|
|
|
|
|
|
|
|
|
||||||||||
ах = Vx |
|
x |
|
2 |
sin |
t |
, ау = Vy |
y |
|
2 2 |
cos |
|
t |
. |
||||||
|
|
|
9 |
|
3 |
|||||||||||||||
|
|
|
18 |
6 |
|
|
|
|
|
|
|
|
||||||||
|
2 |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
При t = 1 c ах = |
|
|
|
≈ – 0,274 см/с2, ау = |
|
|
≈ 1,096 см/с2. |
|
|
|||||||||||
36 |
9 |
|
|
|
||||||||||||||||
Модуль ускорения: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
a |
|
ax2 ay2 |
|
|
0,075 1,201 ≈ 1,129 см/с2. |
|
|
||||||||||||
Строим вектор ускорения по его составляющим, параллельным координатным осям, в масштабе (рисунок 1.4).
4) Касательное и нормальное ускорения.
Величину касательного ускорения находим по выражению:
a |
dV |
V |
x |
a |
x |
V |
y |
a |
y |
0,96 ( 0,274) 1,813 1,096 |
0,857 |
см/с2. |
||
|
|
|
|
|
|
|
|
|||||||
dt |
|
|
|
|
|
V |
|
|
|
2,027 |
||||
|
|
|
|
|
|
|
|
|
|
|
||||
Знак плюс показывает, что касательное ускорение совпадает по направлению с вектором скорости.
Величину нормального ускорения находим из выражения:
|
|
|
|
|
a |
a2 a2 |
|
1,275 0,734 ≈ 0,735 см/с2. |
|
n |
|
|
|
|
5) Радиус кривизны траектории:
V 2 |
2,0272 |
≈ 5,59 см. |
|
an |
|
0,735 |
|
ЗАДАНИЯ ДЛЯ САМОСТОЯТЕЛЬНОЙ РАБОТЫ
По данной теме предлагается 25 вариантов заданий по шесть задач в каждом. Первые три задачи, как правило, нестандартные, хотя и не сложные. Задачи 4 и 5 типовые, а задача шестая − комплексная, охватывающая весь материал кинематики точки. Рисунки к шестой задаче помещены на страницах 30 − 32.
Для каждой задачи требуется выполнить рисунок, на котором изобразить траекторию движения точки (или часть траектории), установить положение точки на траектории в заданный момент времени и построить векторы определяемых и заданных скоростей и ускорений точки.
8

УСЛОВИЯ ЗАДАНИЙ
Задание 1.01
1.01.1.Найти скорость, касательное, нормальное и полное ускорения точки, движущейся по криволинейной траектории по закону S = 2t3 (S − м, t – с), в момент времени, когда угол между векторами скорости и ускорения равен 45°. Радиус кривизны траектории в данной точке равен 24 м.
1.01.2.Точка движется равноускоренно из состояния покоя по окружно-
сти радиусом 5 м. По истечении двух секунд еѐ полное ускорение достигло значения 7,8 м/с2. Найти путь, пройденный точкой за четыре секунды с момента начала движения.
1.01.3.Точка равномерно движется по плоской траектории, радиус кривизны которой ρ = t 2 – 2t + 2 (ρ – м, t – с). В какой момент времени ускорение точки максимально?
1.01.4.Точка движется согласно уравнениям х = 3 – 4sin2πt, у = 2cos2πt
(х, у м, t с). Определить уравнение траектории точки. Вычислить скорость и ускорение точки в момент времени, когда еѐ скорость параллельна оси Ох.
1.01.5. Найти уравнение траектории точки, движущейся по закону х = 2t, у = 4t2 – 8t (х, у м, t с). Определить положение, скорость, ускорение точки, его касательную и нормальную составляющие и радиус кривизны траектории при t = 1 c.
1.01.6. Звено ОС механизма движется по закону φ = |
t |
( − рад, t – с). |
|
6 |
|||
|
|
Построить положение звеньев механизма в моменты времени t0 = 0, t1 = 1 c и
t2 = 3 c. Написать уравнения движения точек А и М механизма в координатной форме и найти уравнение траектории точки М. Определить скорости и ускорения точек А и М, а также радиус кривизны траектории в точке М при t1 = 1 с, если МВ = АС = ВС = ОС = 0,2 м.
Задание 1.02
1.02.1. Точка движется по окружности радиусом 7 м согласно уравнению S = 0,7t 2 (S − м, t – с). Определить дуговую координату точки, когда еѐ нормальное ускорение станет равным 3 м/с2.
9
1.02.2. Спускаясь по склону горы, длина которого равна 128 м, лыжник движется с постоянным ускорением и за первые 5 секунд преодолевает расстояние в 50 м. Считая, что начальная скорость равна нулю, найти время спуска лыжника и его скорость в конце спуска.
1.02.3. Движение точки задано векторным уравнением
(r − м, t – с). Определить закон движения точки, отсчитывая координату S от еѐ начального положения.
1.02.4. |
Точка |
движется согласно уравнениям х = 5 + 2sin |
t |
, |
|||
3 |
|||||||
|
|
|
|
|
|
||
у = 3cos |
t |
(х, у м, t |
с). Найти уравнение траектории, по которой движет- |
||||
3 |
|
||||||
|
|
|
|
|
|
||
ся точка. Определить скорость и ускорение точки в момент времени, когда она находится на оси Ох.
1.02.5. Найти |
уравнение траектории точки, движущейся по закону |
х = 4t2 – 1, у = 2t (х, у |
м, t с). Определить положение, скорость, ускорение |
точки, его касательную и нормальную составляющие и радиус кривизны траектории при t = 0,5 c.
|
1.02.6. Точка В механизма движется по закону S = 0,6sinπt (S − м, |
t – |
||||
с). Построить положение звеньев механизма в моменты времени t0 = 0, t1 = |
|
1 |
|
|||
6 |
|
|||||
|
|
|
|
|
||
с, t2 |
= |
1 |
с. Написать уравнения движения точек А и М механизма в коорди- |
|||
|
||||||
|
2 |
|
|
|
|
|
натной форме и найти уравнение траектории точки М. Определить скорости и ускорения точек А и М, а также радиус кривизны траектории в точке М при t1 = 16 с, если АВ = 0,6 м, АМ = 0,45 м.
Задание 1.03
1.03.1.Точка движется по закону S = 5t2 (S − м, t – с). Определить уско-
рение точки при t = 1 с и радиус кривизны еѐ траектории, если нормальное ускорение в этот момент времени равно 5 м/с2.
1.03.2.Точка, получив некоторую начальную скорость, начала двигаться равнозамедленно по окружности радиусом 10 м. За десять полных обходов по окружности скорость точки уменьшилась вдвое. Какой путь пройдет точка до остановки?
10