

МУ ТМ_2015 / Статика (Михайленко, Живаго)
.pdfМихайленко Н.И., Живаго Э.Я.
СТАТИКА
a
А M
α |
4a |
|
C |
||
D |
||
q |
||
|
||
|
β |
|
G |
B |
|
|
Новокузнецк, 2012
Министерство образования и науки РФ
Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования “Сибирский государственный индустриальный университет”
Кафедра теоретической механики
СТАТИКА
Практикум для выполнения расчетно-графических работ
по дисциплине “Теоретическая механика”
Новокузнецк, 2012
УДК 531 (075)
С
Рецензент:
Кафедра сопротивления материалов и строительной механики (заведующий кафедрой д.т.н., профессор Никитин А.Г.)
С Статика.: практикум / Составители: Н.И. Михайленко, Э.Я. Живаго. СибГИУ. – Новокузнецк, 2012. – 210 с.
Изложены методические указания для выполнения расчетнографических работ по дисциплине “Теоретическая механика”, раздел “Статика”, излагается краткая теория, приведены варианты заданий и ответы к ним.
Предназначены для студентов машиностроительных и строительных специальностей заочного вида обучения
ПРЕДИСЛОВИЕ
Теоретическая механика как одна из естественных физико-мате- матических дисциплин занимает важное место в подготовке инженеров любой специальности. Для хорошего усвоения курса необходимо приобрести твердые навыки в решении конкретных задач, поэтому в учебных планах вузов выделяется достаточно большое количество часов на самостоятельную работу. В связи с этим назрела необходимость разработки многовариантных индивидуальных заданий по каждой теме.
Кафедра теоретической механики более 20 лет занимается разработкой и изданием методических указаний по всем разделам теоретической механики. Со временем задания видоизменялись, перерабатывались, дополнялись, и было принято решение о целесообразности объединить задания по темам в единый сборник индивидуальных заданий.
Всборник заданий по статике включены методические указания по темам:
1.Равновесие плоской системы сходящихся сил.
2.Равновесие плоской произвольной системы сил.
3.Равновесие системы тел.
4.Равновесие систем тел с учетом трения.
5.Равновесие пространственной произвольной системы сил в двух вариантах:
5.1 – Для студентов механических специальностей;
5.2 – Для студентов строительных специальностей.
6.Центр тяжести твердого тела.
Вкаждой теме даётся краткая теоретическая часть. Большое место отведено примерам и методам решения задач. Необходимые справочные данные приведены в приложениях. Решение задач
сопровождается рядом указаний, которые должны помочь студенту при самостоятельном изучении материала. Кроме этого по всем темам и вариантам приведены ответы, что поможет студенту заранее убедиться в правильности решения задачи. В этой части сборник будет особенно полезен студентам заочной формы обучения.
Задачи подобраны частью из существующих учебных пособий без изменения или с частичными изменениями, частью предложены авторами сборника.
Авторы выражают признательность бывшим сотрудникам кафедры: Ш.Г. Володарской, К.С. Горбунову, Л.С. Молокову, М.А. Шинкареву, В.А. Черникову, Г.Т. Барановой, Н.И. Крестьяновой, которые в свое время принимали участие в подготовке заданий по некоторым темам.
Авторы выражают надежду, что предлагаемый сборник заданий будет полезен при организации самостоятельной работы студентов, как дополнение к существующим учебным пособиям.
СТАТИКА. ОСНОВНЫЕ ПОНЯТИЯ
Статика – это раздел теоретической механики, в котором изучаются методы эквивалентных преобразований различных систем сил и устанавливаются условия равновесия сил, приложенных к твердому телу.
Системой сил называется совокупность нескольких сил, приложенных к точке, телу или системе тел.
Встатике рассматриваются абсолютно твердые тела, т.е. тела, которые не деформируются под действием приложенных к ним сил.
Втеоретической механике изучаются свободные (условно) тела.
Вреальных задачах тела несвободные, т.е. их движение ограничивается другими телами. Тела, накладывающие ограничение на движение изучаемого тела, называются связями этого тела.
Сила, с которой связь действует на тело, называется реакцией связи.
На основании принципа освобождаемости от связей,
несвободное твердое тело (конструкция) рассматривается как свободное, если мысленно освободить его от наложенных связей и приложить к нему (к системе) реакции связей.
Реакция связи направлена в сторону, противоположную направлению, в котором связь препятствует перемещению рассматриваемого тела. Направление реакции зависит от конструктивных особенностей связи. Все связи можно условно разделить на три группы.
К первой группе относят связи, конструкция которых позволяет однозначно определить направление реакции (связи 1…4).
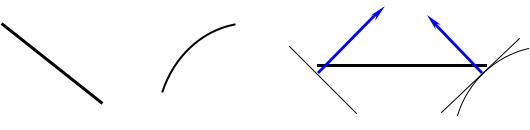
1)Гладкая поверхность
|
|
N |
|
|
|
B |
|
|
|
A |
N |
τ |
|||
|
А В  А
А 

 В
В
τ
Линия действия реакции гладкой поверхности направлена по нормали к общей касательной соприкасающихся поверхностей тел

независимо от сил, приложенных к рассматриваемому телу. N A и N B направлены от опорной поверхности к телу.
2) Точечная связь или опора на ребро (уступ)
А |
|
|
N A |
N B |
|
|
|
||
|
В |
А |
|
В |
|
|
|
||
|
|
|
|
|
Реакции |
N A и N B перпендикулярны поверхности |
|||
опирающегося тела и направлены от опор к телу.
3) Гибкие связи (нити, цепи, канаты, тросы)
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
A |
|
R |
|||||
А |
В |
|
|
|
B |
|||||
А |
В |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
Реакции RA и RB направляются по нитям от тела (гибкие связи работают только на растяжение).
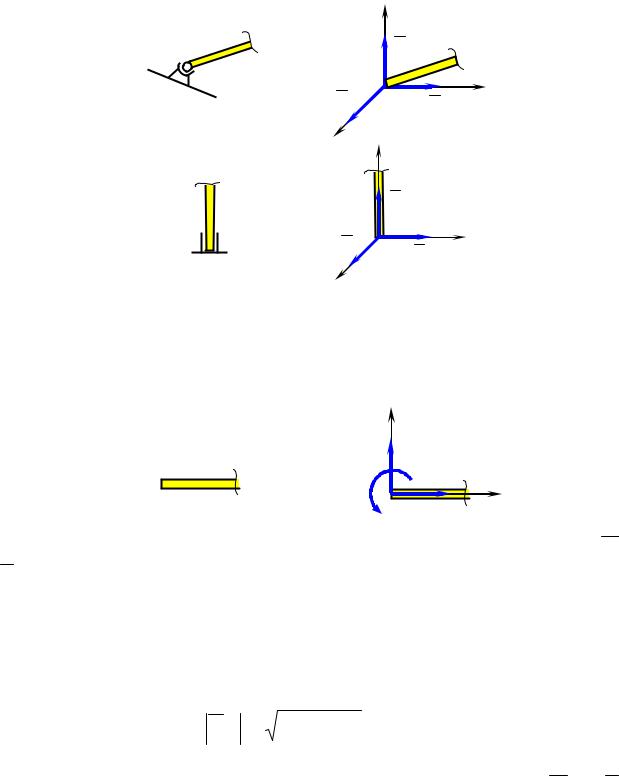
4) Подвижная шарнирная связь (опора на катках)
а) |
б) |
А |
В |
RA |
RB |
Реакции RA и RB перпендикулярны к опорным поверхностям и направлены от опор к телу.
Ко второй группе относят связи, конструкция которых позволяет однозначно определить только линию действия реакции (связь 5).

5) Невесомые стержни (с шарнирами на концах)
В С |
RB |
R |
|
|
C |
 А
А
RA
Реакции RB и RC направлены по осям стержней в
произвольном направлении. Стержни могут работать и на сжатие и на растяжение. В случае изогнутых стержней линия действия реакции RA проходит через ось шарниров.
К третьей группе относятся связи, конструкция которых не позволяет определить ни линию действия, ни направление реакции (связи 6…8). Для таких связей реакция представляется ее составляющими, параллельными выбранным координатным осям.
6) Цилиндрический шарнир
Ось шарнира А А перпендикулярна плоскости рисунка.
z |
|
В |
y |
Ось шарнира В |
|
О |
|
|
|||
|
|
|
|
совпадает с |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
осью Оу. |
х
y
Y A
А |
|
X |
A х |
|
|
|
z |
|
|
|
|
|
|
|
|
|
ZB |
В |
y |
|||
|
|
|
|||||
О |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
B |
|
|
||
|
X |
|
|
||||
х |
|
|
|
|
|
|
|
Реакции шарниров (А или В) RA и RB изображаются их составляющими X A , YA или X B , ZB , параллельными выбранным координатным осям.
7) Сферический шарнир (А) и подпятник (В)
z
А |
|
ZA |
|
|
|
у |
|
|
|
|
|
|
X A |
А |
YA |
|
x |
|
|
|
|
z |
|
|
|
ZB |
|
В |
X B |
В |
у |
Y |
|||
|
x |
|
B |
|
|
|
|
|
|
Реакции |
|
|
A и |
|
|
изображаются их составляющими ( |
|
|
|
|
||||||||||||||
R |
R |
B |
X |
A , Y |
A , |
|||||||||||||||||||||
|
|
A и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Z |
X |
B , YB , ZB ) параллельными осям координат. |
||||||||||||||||||||||||
|
|
|
|
8) Жесткая заделка (при плоской системе сил) |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
у |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y |
A |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
А |
|
|
||||||||||
|
|
|
|
|
|
А |
|
|
|
|
|
|
|
|
Х |
|
x |
|||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
МА |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
А |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Реакция заделки представляется двумя составляющими Х А, Y A , параллельными координатным осям, и реактивной парой с моментом МА.
Для связей (6…8), реакции которых представляются составляющими, полная реакция определяется их векторной суммой, а направление определяется направляющими косинусами
|
A = |
|
A + |
|
A , R A |
= X A2 +YA2 , cos( |
|
A , Ox) = |
Rx |
. |
|
R |
X |
Y |
R |
||||||||
|
|||||||||||
|
|
|
|
|
|
|
|
|
RA |
||
При решении задач направления составляющих ( Х А, Y A ) выбираются произвольно. Если при вычислении значение составляющей реакции окажется отрицательным, это означает, что ее реальное направление будет противоположно направлению, принятому первоначально.

Тема 1. РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ СХОДЯЩИХСЯ СИЛ
Систему сил называют сходящейся, если линии действия всех приложенных сил пересекаются в одной точке. Если линии действия сил расположены в одной плоскости, то систему называют плоской сходящейся. В противном случае система будет пространственной сходящейся.
Сходящаяся система сил эквивалентна одной силе, которую называют равнодействующей. Равнодействующая равна векторной сумме сил системы и линия её действия проходит через точку пересечения линий действия всех сил системы
n
R = ∑Fk .
k =1
Величину и направление равнодействующей можно определить аналитическим способом. Для этого следует выбрать систему прямоугольных осей координат и спроецировать векторное равенство на выбранные оси, учитывая, что проекция вектора суммы на какуюлибо ось равна сумме проекций слагаемых векторов на ту же ось.
Строится проекция силы на ось следующим образом: из начала и конца вектора силы опускаются перпендикуляры на ось, тогда длина отрезка оси, заключенная между этими перпендикулярами и является проекцией силы на ось (рисунок 1.1).
ab = F1 x = F1 cos(F1 Ox) = F1 cosα,
cd = F2 x = F2 cos(F2 Ox) = F2 cos β = F2 cos(180°−α) = −F2 cosα,
ek = F3 x = F3 cos(F3 Ox) = F3 cos 90° = 0, nm = F4 x = F4 cos(F4 Ox) = F4 cos 0° = F4 ,
op = F5 x = F5 cos(F5 Ox) = F5 cos180° = −F5 .
Если угол между силой и осью острый, то проекция силы на ось положительна, если тупой – отрицательна, а если сила перпендикулярна оси, то её проекция на ось равна нулю.
Проекция равнодействующей на координатную ось равна сумме проекций сил системы на ту же ось.