

Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования
«Магнитогорский государственный технический университет им. Г.И. Носова»
Н.В. Фомин
СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ
Утверждено Редакционно-издательским советом университета в качестве учебного пособия
Магнитогорск
2014
УДК 62-83(075.8)
Рецензенты:
Главный энергетик, ОАО «Магнитогорский метизно-калибровочный завод «ММК-МЕТИЗ»»
А.Р. Шумаков
Доктор технических наук, профессор, директор института энергетики и автоматизированных систем,
ФГБОУ ВПО «Магнитогорский государственный технический университет им. Г.И. Носова»
С.И. Лукьянов
Фомин Н.В.
Системы управления электроприводами [Электронный ресурс] : учебное пособие / Николай Владимирович Фомин ; ФГБОУ ВПО «Магнитогорский государственный технический университет им. Г.И. Носова». – Электрон. текстовые дан. (4,6 Мб). – Магнитогорск : ФГБОУ ВПО «МГТУ», 2014. – 1 электрон. опт. диск (CD-R). – Систем. требования : IBM PC, любой, более l GHz ;
512 Мб RAM ; 10 Мб HDD ; МS Windows XP и выше ; Adobe Reader 8.0 и выше ; CD/DVD-ROM дисковод ; мышь. – Загл. с титул. экрана.
В учебном пособии рассмотрены вопросы построения разомкнутых и замкнутых систем управления электроприводов, защиты и блокировки в схемах управления электроприводов, изложены принципы построения систем подчиненного регулирования координат с последовательной коррекцией в электроприводе постоянного тока, выполненного по системе тиристорный преобразователь – двигатель. Рассмотрена реализация систем управления основных электроприводов постоянного тока: регулирования скорости, ЭДС, позиционных и двухзонных. Приведены примеры реализации основных элементов системы управления на аналоговых операционных усилителях. Представлены результаты моделирования основных режимов работы при настройке контуров регулирования координат электропривода.
Пособие предназначено для студентов специальностей 140604- «Электропривод и автоматика промышленных установок и технологических комплексов», 220401 – «Мехатроника» и аспирантов специальности 05.09.03 – «Электротехнические комплексы и системы».
УДК 62-83(075.8)
© Фомин Н.В., 2014 © ФГБОУ ВПО «Магнитогорский
государственный технический университет им. Г.И. Носова», 2014
СОДЕРЖАНИЕ |
|
Введение ........................................................................................................... |
6 |
Глава 1. Релейно-контакторные системы управления электроприводом .11 |
|
1.1 Условные обозначения и правила построенияэлектрических схем12 |
|
1.2. Принципы управления пуско – тормозными режимамив РКСУ ... |
14 |
1.3.Управление пуско – тормозными режимами в функции времени.20
1.4.Управление пуско – тормозными режимами в функции скорости
(ЭДС).......................................................................................................... |
23 |
1.4.1. Реле противовключения.................................................................. |
29 |
1.5. Управление пуско – тормозными режимамив функции тока |
|
(момента) ................................................................................................... |
36 |
1.6. Пример изучения работы схемы управления электродвигателем |
|
постоянного тока независимого возбуждения........................................ |
38 |
1.7. Защиты в схемах электропривода..................................................... |
41 |
1.8. Блокировки и сигнализация в схемах электропривода................... |
47 |
Глава 2. Регулирование координат электропривода................................... |
48 |
2.1. Показатели качества регулирования ................................................ |
49 |
2.1.1. Статические показатели качества регулирования ................... |
50 |
2.1.2. Динамические показатели качества регулирования................ |
54 |
2.1.3. Связь показателей качества регулирования с ЛАЧХ |
|
разомкнутого контура регулирования ................................................ |
58 |
2.2. Динамические свойства тиристорного электропривода................. |
63 |
2.2.1. Тиристорный преобразователь как элементсистемы |
|
регулирования....................................................................................... |
63 |
2.2.2. Двигатель постоянного тока независимоговозбуждения как |
|
элемент системы регулирования......................................................... |
66 |
Глава 3. Системы управления электроприводов с параллельными |
|
обратными связями........................................................................................ |
73 |
3.1. Общие понятия и определения ......................................................... |
73 |
3.2. СУЭП с отрицательной обратной связью по напряжению............. |
75 |
3.2.1. Вырожденная структурная схема СУЭП с отрицательной |
|
обратной связью по напряжению........................................................ |
82 |
3.3. СУЭП с отрицательной обратной связью по скорости вращения |
|
электродвигателя....................................................................................... |
87 |
3.3.1. Статические характеристики СУЭП с отрицательной |
|
обратной связью по скорости.............................................................. |
92 |
3.4. СУЭП с положительной обратной связью по току якоря............... |
94 |
3.5. СУЭП с задержанной отрицательной обратной связью по току |
|
якоря......................................................................................................... |
100 |
Глава 4. Системы управления с подчиненным регулированием координат
.......................................................................................................................105
3
4.1. Оптимальные структуры ................................................................. |
105 |
4.2. Принцип построения систем подчиненного регулирования |
|
координат................................................................................................. |
111 |
4.3. Определение передаточной функции регулятора ......................... |
113 |
Глава 5. СУЭП по системе ТП-Д с подчиненным регулированием |
|
координат...................................................................................................... |
115 |
5.1. Настройка контура регулирования тока якоря .............................. |
117 |
5.1.1.Динамические свойства контура регулирования тока якоря123
5.1.2Анализ влияния внутренней обратной связи по ЭДС
электродвигателя на работу токового контура ................................ |
132 |
5.1.3 Анализ влияния режима прерывистого тока на работу |
|
токового контура ................................................................................ |
141 |
5.2 Настройка контура регулирования скорости вращения |
|
электропривода........................................................................................ |
159 |
5.2.1. Пуск под отсечку в однократной СУЭП................................. |
171 |
5.2.2.Реакция однократной СУЭП на возмущающее воздействие175
5.3.Настройка контура регулирования скорости в двукратно-
интегрирующей СУЭП ........................................................................... |
179 |
5.4. Ограничение переменных в структурах |
|
подчиненногорегулирования ................................................................. |
193 |
5.4.1 Ограничение задающих воздействий для локальных систем |
|
регулирования..................................................................................... |
193 |
5.4.2 Ограничение переменных с помощью задатчиков |
|
интенсивности .................................................................................... |
196 |
5.5. Учет дополнительных ограничений в структурах подчиненного |
|
регулирования ......................................................................................... |
225 |
5.5.1. Ограничение производной тока якоря при помощи фильтра на |
|
входе регулятора тока ........................................................................ |
229 |
5.5.2. Ограничение производной тока якоря при помощи задатчика |
|
интенсивности на входе регулятора тока......................................... |
231 |
Глава 6. СУЭП с обратной связью по ЭДС электродвигателя................. |
235 |
6.1. Настройка контура регулирования ЭДС в однократно – |
|
интегрирующей системе регулирования............................................... |
236 |
6.2. Настройка контура регулирования ЭДС в двукратно – |
|
интегрирующей системе регулирования............................................... |
244 |
Глава 7. СУЭП в двухзонной системе регулирования скорости |
|
электродвигателя.......................................................................................... |
249 |
7.1. Настройка системы регулирования скорости по цепи якоря ....... |
253 |
7.2. Настройка системы регулирования скорости по цепи возбуждения
...................................................................................................................7.2.1. Настройка контура регулирования тока возбуждения |
260 |
|
|
( магнитного потока ) ........................................................................... |
261 |
4 |
|
7.2.2. Настройка контура регулирования ЭДС ............................... |
270 |
Глава 8. Позиционная СУЭП ...................................................................... |
281 |
8.1. Настройка контура регулирования положения ............................. |
284 |
8.1.1 Настройка регулятора положения при отработке малых |
|
перемещений....................................................................................... |
285 |
8.1.2 Настройка регулятора положения при отработке больших |
|
перемещений....................................................................................... |
287 |
8.1.3 Настройка регулятора положения при отработке средних |
|
перемещений....................................................................................... |
289 |
8.2 Настройка нелинейного регулятора положения............................ |
290 |
8.3 Влияние нагрузки на работу позиционной системы...................... |
293 |
Приложение А.............................................................................................. |
305 |
Приложение Б............................................................................................... |
312 |
Приложение В .............................................................................................. |
324 |
Библиографический список ........................................................................ |
352 |
5
ВВЕДЕНИЕ
Дисциплина «Системы управления электроприводов» (СУЭП) изучается студентами специальностей 140604 «Электропривод и автоматика промышленных установок и технологических комплексов» и 220401 «Мехатроника» и относится как к бакалаврской, так и к инженерной и магистерской программам обучения. Данная дисциплина является одной из завершающих образование студентов данных специальностей и строится с учетом полученных студентами знаний по электрическим машинам и аппаратам, электронике, теории автоматического управления, элементам систем автоматики и теории электропривода.
Большое разнообразие СУЭП требует их классификации. Одна из возможных классификаций СУЭП приведена в [3,4]. В ней наиболее важными классификационными признаками считают функциональный, структурный и конструкционный (рис. В.1).
В основе тех функций, которые выполняются СУЭП, лежат требования технологического процесса. Электропривод обеспечивает движение механического исполнительного органа (рабочего органа (РО)). Функциональный признак является наиболее важным, так как с
выяснения требований технологического процесса начинается со-
ставление технических условий на проектируемый электропривод. Классификация электроприводов по типу регулируемой координаты механической системы является наиболее естественной. Здесь обычно выделяют системы регулирования усилия (момента), скорости и положения рабочего механизма. При этом встречаются системы, как прямого регулирования, так и косвенного. Например, системы регулирования усилия редко выполняются с датчиками усилий. Значительно чаще встречаются системы косвенного регулирования, например, с обратной связью по току якоря двигателя постоянного тока.
6
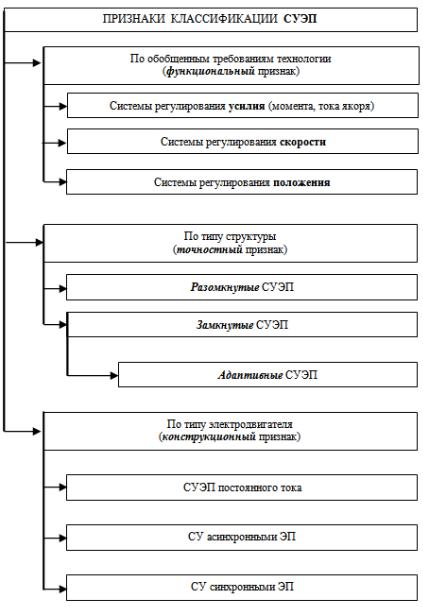
Рис. В1. Классификация систем управления электроприводов
7
Регулирование тока применяется как в случае непосредственного контроля усилия на рабочем органе (например, поддержание натяжения наматываемой полосы на моталках станов холодной прокатки), так и при формировании процессов пуска и торможения электропривода с заданным темпом. Системы регулирования скорости также могут выполняться как прямыми, так и косвенными, например, с обратной связью по напряжению на якоре. Системы регулирования положения (позиционные) получили также название следящих электроприводов.
Уровень требований к электроприводу со стороны различных технологических агрегатов может весьма значительно отличаться, и это отразится на возможной структуре СУЭП.
В зависимости от требуемой точности регулирования применяют разомкнутые (без обратных связей) или замкнутые (с обратными связями) СУЭП.
Если электропривод, работая на естественной механической характеристике двигателя, обеспечивает требуемую точность регулирования, целесообразнее применить разомкнутую систему регулирования. В случаях, требующих более высокой точности регулирования, применяют замкнутые системы. Сегодня более 95% всех электроприводов выполнено по разомкнутому принципу. Однако обострившиеся проблемы энерго- и ресурсосбережения требуют более широкого применения регулируемых электроприводов и, следовательно, замкнутых систем регулирования. Так, по мнению американских экспертов, доля регулируемых электроприводов может быть доведена до 30...40%, но относительно высокие цены на электронные компоненты препятствуют массовому применению регулируемого электропривода.
Для замкнутых систем регулирования основным принципом управления является принцип обратной связи, означающий управление по отклонению действительного значения регулируемого параметра от заданного. дополнением к этому принципу является комбинированное управление, когда, кроме отклонения от задания, вводится в управление возмущающее воздействие или дополнительно производные величины задания.
Особую группу замкнутых СУЭП образуют адаптивные системы - такие, которые при изменении внешних воздействий или параметров электропривода так изменяют свои структуру и (или) параметры корректирующих связей, чтобы выбранный показатель качества регулирования (например, производительность, точность и т.д.) стал наибольшим. Например, в электроприводе моталки стана холодной прокатки при намотке полосы на барабан моталки диаметр рулона может изменяться в весьма значительном (до 2,2…3 и более раз) диапазоне.
8
Поэтому электропривод, настроенный при работе на начальный (малый) диаметр рулона, при больших диаметрах из– за изменения момента инерции электропривода и соотношения между угловой и окружной скоростями рулона, должен быть перестроен.
Наконец, конструкционный признак электропривода важен потому, что различные по принципу своей работы типы электродвигателей требуют и различной аппаратуры.
Под термином «система управления электропривода» подразу-
мевают комплекс технических средств, формирующих и осуществляющих воздействия на двигатель с целью управления движением рабочего органа (РО) производственной установки в соответствии с технологическими требованиями[1,2,3].
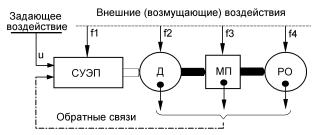
Таким образом, в понятии СУЭП конкретизируется объект управления, которым является двигатель (Д) совместно с механической передачей (МП) и рабочим органом (РО). В составе СУЭП можно выделить слаботочную часть, формирующую алгоритм управления, и сильноточную часть, осуществляющую силовое управляющее воздействие на двигатель. По функциональному назначению управление в электроприводах разделяется на два уровня: верхний — технологический, являющийся внешним уровнем относительно электропривода, и нижний — внутренний относительно электропривода.
На верхнем уровне система управления вырабатывает технологическое задание на движение рабочих органов отдельной технической установки (например, прокатного стана, крана, лифта) или целой технологической системы (например, системы водоснабжения, теплоснабжения, электроснабжения).
Рис. В2. Электропривод с системой управления
В задачу СУЭП верхнего уровня не входит формиро вание свойств собственно электропривода, его статических, динамических,
9
точностных характеристик. Данная задача возлагается на систему управления нижнего уровня, которая является неотъемлемой час тью понятия «электропривод» (рис. В.2). Помимо СУЭП, это понятие включает в себя двигатель (Д), механич ескую передачу (МП) и рабочий орган (РО). Таким образом, рабочий орган, движущи йся совместно с двигателем, но физически принадле жащий производственной установке (рабочей машине), рассматривается как составная часть понятия «электропривод». Это сделано по тем соображениям, что СУЭП, Д, МП, РО, имеющие друг с другом внешние и внутренние обратные связи, образуют совместно единую динамическую электромеханическую систему. В этой системе входом является задающий сигнал (воздействие) на СУЭП, выходом
— движение РО. Только при совместном рассмотрении составных частей данной системы можно о пределить все статические и динамические показатели и оценить качество электро привода. В данном определении электропривод является объектом, как изучения, так и проектирования. В терминологии заво дов-изготовителей электропривод как изделие именуется комплектным электроприводом, в состав которого входят СУЭП и двигатель, а иногда и редуктор.
Если двигатель приводит в движение только один РО, то электропривод называют индивидуальным электроприводом данной установки. Объектом управления для СУЭП верхнего уровня может быть как один электропривод, так и совокупность всех индивидуальных электроприводов производственной установки. На рис. В.2 широкой светлой стрелкой показан поток электрической энергии от питающей сети к двигателю, широкими темными стрелками
– поток механической энергии от двигателя к рабочему органу, штрих – пунктирной линией изображены сигналы обратных связей по координатам электропривода и установки, а вертикальными стрелками (f1 - f4) обозначены возможные внешние возмущающие воздействия (моменты нагрузки, флуктуации напряжений питания и т.п.). Задающее (управляющее) воздействие на входе СУЭП может быть сформировано либо СУЭП верхнего уровня, либо мес тным постом управления.
В чем конкретно состоят задачи, возлагаемые на СУЭП верхнего и нижнего уровней, рассмотрим на примере стана холодной прокатки. Система СУЭП нижнего уровня включает в себя СУЭП электроприводов разматывателя, прокатных клетей и моталки, она формирует плавные динамические процессы разгона и торможения двигателей, обеспечивает необходимые для точной остановки
10