МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
Уфимский государственный нефтяной технический университет
Кафедра автоматизации химико-технологических процессов
Г.К.Аязян
Определение параметров модели методом площадей Симою
Методическое руководство к курсовому и дипломному проектированию для студентов специальности
«Автоматизация производственных процессов и производств»
Уфа-2002
Определение параметров модели методом площадей
1. Введение
Метод площадей Симою М.П. позволяет определить передаточную функцию модели объекта по кривой разгона.
Кривая разгона – реакция динамического звена (объекта регулирования) на скачкообразное воздействие произвольной амплитуды. В отличие от классического определения переходной характеристики амплитуда входного воздействия не равна единице. Кривая разгона может быть получена как экспериментально, так и расчетным путем.
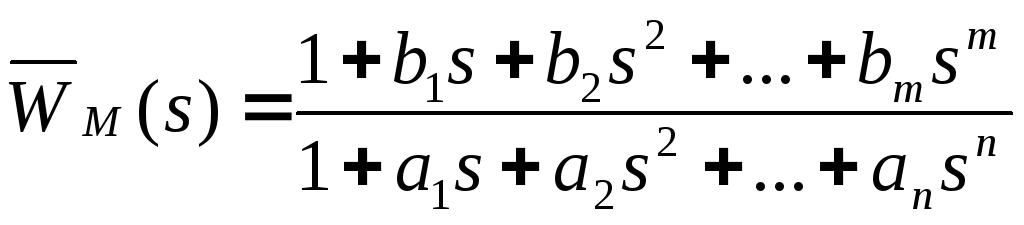
Динамические свойства объекта аппроксимируются моделью следующего вида:
 , (1)
, (1)
где
![]() –
коэффициент усиления,
–
коэффициент усиления,
![]() –
время запаздывания (запаздывание),
–
время запаздывания (запаздывание),
![]() –
коэффициенты передаточной функции,
–
коэффициенты передаточной функции,
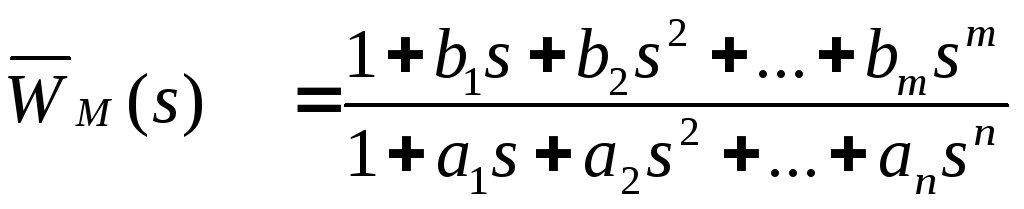 – (2)
– (2)
нормированная
передаточная функция с коэффициентом
усиления равным единице ![]() (3)
(3)
Основной задачей
является определение коэффициентов
![]() передаточной функции методом, предложенным
М.П. Симою [1].
передаточной функции методом, предложенным
М.П. Симою [1].
2 Преобразование кривой разгона к расчетной форме
Для определения параметров модели (1) кривая разгона преобразуется к расчетной.
Процедура приведения кривой разгона к расчетной зависит от динамических свойств объекта. Для практических целей представляют интерес два случая:
объект регулирования с самовыравниванием (пропорциональный).
– объект регулирования без самовыравнивания (интегральный).
2.1 Объект регулирования с самовыравниванием
На рисунке 1. приведена типичная кривая разгона объекта с самовыравниванием, полученная экспериментально.
Для получения
кривой разгона в АСР устанавливается
номинальный статический режим
![]() Затем система переводится в ручной
режим (регулятор отключается, обратная
связь разрывается) и на объект регулирования
в момент времени
Затем система переводится в ручной
режим (регулятор отключается, обратная
связь разрывается) и на объект регулирования
в момент времени![]() с
помощью задатчика подается скачкообразное
воздействие. Например, скачком изменяется
давление на пневматический исполнительный
механизм (клапан). Изменение давления
приводит к перемещению регулирующего
органа (шток, заслонка и т. д.) и как
следствие к изменению потока энергоносителя
или реагента и соответствующему изменению
регулируемой величины
с
помощью задатчика подается скачкообразное
воздействие. Например, скачком изменяется
давление на пневматический исполнительный
механизм (клапан). Изменение давления
приводит к перемещению регулирующего
органа (шток, заслонка и т. д.) и как
следствие к изменению потока энергоносителя
или реагента и соответствующему изменению
регулируемой величины![]() ,
рисунок 1.
,
рисунок 1.
Величина запаздывания определяется непосредственно по кривой разгона, рисунок 1, как время, за которое отклонение выходной величиныy(t) после нанесения входного воздействия не превышает 0,5%1% отyуст..
Коэффициент усиления определяется по формуле:
![]() (4)
(4)
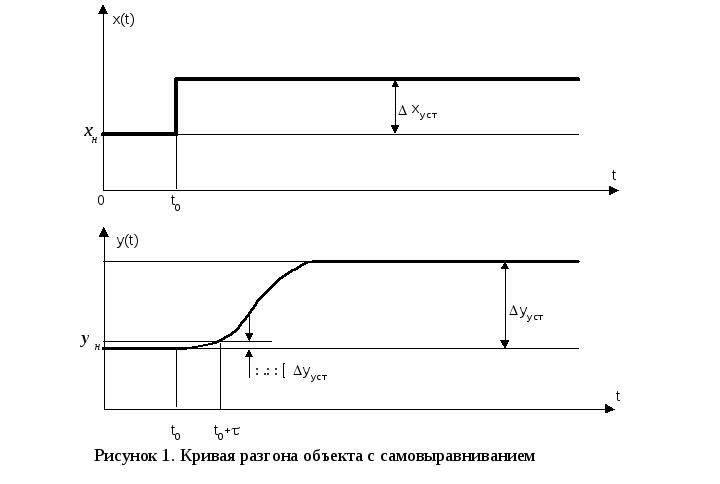
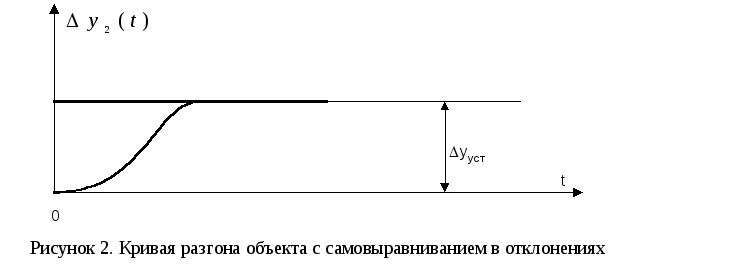
Перенося начало координат в точку t=t0+,y=y0и исключая таким образом запаздывание, получим расчетную кривую разгона, рисунок 2.
Переходная кривая, рисунок 2, является исходной для расчета параметров модели по программе, описанной в «Методических указаниях».
Для расчета параметров модели методом площадей целесообразно ввести нормированную кривую разгона (переходную характеристику), рисунок 3, определяемую формулой
![]() (5)
(5)
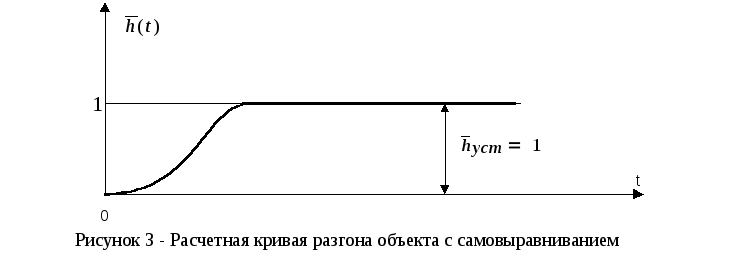
Переходную
кривую
![]() ,
рисунок 3, можно рассматривать как
реакцию динамического звена с нормированной
передаточной функцией вида (2)
,
рисунок 3, можно рассматривать как
реакцию динамического звена с нормированной
передаточной функцией вида (2)
 (2)
(2)
Тогда
изображение по Лапласу
![]() можно записать следующим образом
можно записать следующим образом
![]() (6)
(6)
Параметры
![]() модели (2) могут быть определены по
нормированной кривой разгона.
модели (2) могут быть определены по
нормированной кривой разгона.
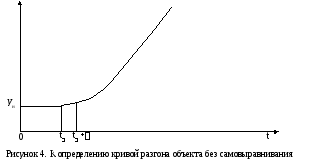
2.2 Объект регулирования без самовыравнивания
Кривая разгона объекта без самовыравнивания приведена на рисунке 4.
x(t)
y(t)