

kurs_lekcii_mo_matematicheskomu_analizu / Упрощение уравнения кривых второго порядка
.pdfТЕМА 14. УПРОЩЕНИЕ КРИВЫЕ ВТОРОГО ПОРЯДКА.
Общее уравнение кривой второго порядка имеет вид (1)
Ax2 + 2Bxy + Cy2 + 2Dx + 2Ey + F = 0.
Если это уравнение не содержит члена с произведением координат, т. е. 2B = 0, то дополняя члены, содержащие x, y, до полных квадратов, при помощи параллельного переноса можно привести уравнение к каноническому виду.
Если же 2B 6= 0, то с помощью поворота осей можно избавиться от члена с произведением координат. В результате получим канонические уравнения.
1.Параллельный перенос системы координат
Рассмотрим две системы координат Oxy и O1XY с одинаковым направлением осей координат, но разными началами координат.
|
Y |
|
6 |
|
y |
6 |
|
M (x, y) |
||||||
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
* |
|
|
|
|
|
|
|
|
|
|
|
|
|
(X, Y ) |
|||||
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
- |
|
|
|||||
|
|
|
Qk |
|
|
|
|
|
|
|
|
|||
|
O1 |
|
|
|
|
|
|
X |
||||||
|
|
|
|
|
|
|
Q |
- |
|
|
||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
O |
|
|
|
|
x |
||||
Пусть на плоскости взята точка |
|
M и пусть |
|
(x, y) – ее координаты в системе Oxy и |
||||||||||
(X, Y ) – в системе O1XY, а координаты точки O1 в системе Oxy O1(a, b). |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
OO1 + O1M = OM , |
||||||||||
или, в координатах,
X + a = x и Y + b = y.
Имеем формулы для перехода от старых координат точки M к ее новым координатам:
x = X + a, y = Y + b.
Формулы, выражающие новые координаты через старые, запишутся
X = x − a, Y = y − b.
Пример 1.
Построить линию, определяемую уравнением
9x2 − 16y2 − 36x − 32y − 124 = 0
(14)
(15)
1
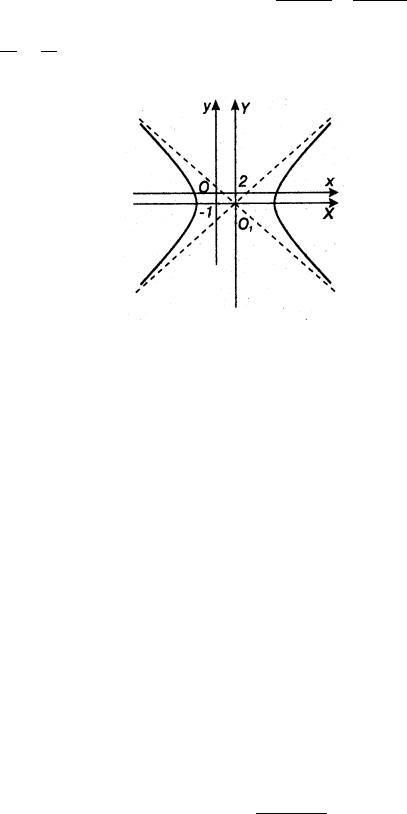
Решение. Преобразуем исходное уравнение, выделив полные квадраты:
9(x2 − 4x + 4) − 16(y2 + 2y + 1) − 36 + 16 − 124 = 0,
(x − 2)2 − (y + 1)2 = 1. 16 9
Перейдем к новым координатам по формулам (15): X = x − 2, Y = y + 1, получим уравнение − Y92 = 1, определяющее гиперболу с полуосями a = 4, b = 3. Центр гиперболы находится в точке, для которой X = 0, Y = 0.
Так как X = x − 2, Y = y + 1, то x − 2 = 0, y + 1 = 0, откуда x = 2, y = −1.
Получена точка O1(2, −1), в которой находится начало новой системы координат.
2.График квадратного трехчлена
Пусть дано уравнение
y = Ax2 + Bx + C.
Чтобы получить простейшее уравнение данной кривой, подставим вместо старых координат x и y их выражения через новые координаты X, Y из формул параллельного переноса (14) в уравнение y = Ax2 + Bx + C :
Y + b = A(X + a)2 + B(X + a) + C.
После упрощений получим
Y = AX2 + (2Aa + B)X + Aa2 + Ba + C − b.
Выберем координаты нового начала a и b так, чтобы в правой части последнего уравнения коэффициент при X и свободный член обратились в нуль:
2Aa + B = 0,
Aa2 + Ba + C − b = 0.
Решая эту систему уравнений относительно неизвестных a, b, получим
a = |
− |
B |
|
, b = |
4AC − B2 |
. |
2A |
|
|||||
|
|
4A |
||||
2
При таком выборе начала координат O1 новой системы координат уравнение y = Ax2 + Bx + C примет вид Y = AX2, т. е. будет простейшим уравнением параболы, для которой ось O1Y является осью симметрии.
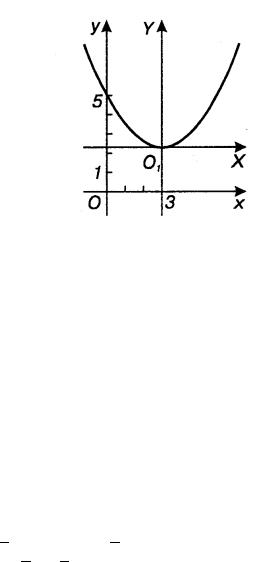
Пример 2.
Построить линию, определяемую уравнением 3y = x2 − 6x + 15. Решение. Преобразуя это уравнение, получаем
y = 13 ((x2 − 6x + 9) + 6), y = 13 (x − 3)2 + 2, y − 2 = 13 (x − 3)2.
Перейдем к новым координатам по формулам (15): X = x − 3, Y = y − 2. В новых координатах уравнение примет вид Y = 13 X2 , или X2 = 3Y ; оно определяет параболу.
Строим системы координат Oxy и O1XY, последнюю с началом в точке O1(3, 2), и саму параболу – в новой системе координат по ее каноническому уравнению.
3. Поворот системы координат
Рассмотрим выражение |
|
Ax2 + 2Bxy + Cy2, |
(16) |
которое представляет собой многочлен второй степени относительно переменных x и y
и называется квадратичной формой.
Тогда матрица |
C |
(17) |
B |
||
A |
B |
|
называется матрицей квадратичной формы.
Рассмотрим линейное преобразование, заданное матрицей (17). Пусть λ1 и λ2 его собственные числа, а a1 = (α1, β1) и a2 = (α2, β2) собственные векторы.
Нормируем векторы a1 и a2 :
|
l1 |
= |a1| |
= |
|a1|, |
|a1 |
| |
, l2 = |a2| |
= |
|a2|, |
|a2 |
| |
|||||||||||||||||||
|
|
|
|
a1 |
|
|
α1 |
β1 |
|
|
|
|
|
|
|
|
|
|
|
|
a2 |
|
|
α2 |
β2 |
|||||
и составим матрицу S : |
|
|
|
|
|
|
|
a1 |
|
|
|
|
|
a2 |
|
|
! |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
α1 |
|
|
|
|
α2 |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
| |
|
1 |
| |
|
|
|
| |
|
2 |
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S = |
|
a |
|
|
a |
. |
|
|
|
|
(18) |
|||||||||||
|
|
|
|
|
|
|
|
|
|
β1 |
|
|
|
|
|
β2 |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
| |
|
|
| |
|
| |
|
|
| |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
3

Линейное ортогональное преобразование
x
y
=
α1
|a1|
β1
|a1|
α2
|a2|
β2
|a2|
!
·x1 y1
осуществляет поворот системы координат. Ортами, задающими новую систему Ox1y1 , являются векторы l1 , l2, а выражение (16) в системе Ox1y1 примет вид λ1x21 + λ2x22.
Замечание 4. Определитель матрицы S равен ±1 : |S| = ±1. В том случае, когда |S| = 1, взаимная ориентация новых координатных осей сохраняется; если |S| = −1 , их ориентация меняется на противоположную.
Пример 3.
Привести к каноническому виду уравнение линии второго порядка и построить кривую
5x2 − 6xy + 5y2 − 24x + 8y + 24 = 0.
Решение. Группа старших членов данного уравнения образует квадратичную форму
5x2 − 6xy + 5y2. |
5 |
|
|
−3 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
Ее матрица A = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
−3 |
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
Характеристическое уравнение в данном случае принимает вид |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 −3λ |
5−3λ |
= (5 − λ)2 − (−3)2 = 0, |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− |
|
|
|
− |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
или λ |
|
− 10λ + 16 = 0. |
Откуда λ1 |
= 2 |
|
λ2 |
= 8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
Получим систему для определения собственных векторов. Пусть |
|
|
|
|
|
= (α, β), тогда |
||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
a |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Aa |
= λa или |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
5 |
|
|
|
|
−3 |
|
|
α |
|
|
|
|
= λ |
|
|
|
α |
|
|
5α − 3β = λα, |
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
−3 5 |
β |
|
β |
−3α + 5β = λβ. |
|||||||||||||||||||||||||||||||||||||||||||||||
Следовательно, |
|
|
|
(5 − λ)α − 3β = 0, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−3α + (5 − λ)β = 0. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
При λ1 = 2 получим систему |
|
3α − 3β = 0, |
Откуда β = α. Положив α = c, где |
|||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−3α + 3β = 0. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
c – произвольная постоянная, найдем первый собственный вектор |
a |
1 = (c, c). |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
При λ2 = 8 получим систему |
|
|
|
−3α − 3β = 0, |
|
Откуда α = |
|
|
|
|
β. Положив β = c, |
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−3α − 3β = 0. |
|
|
|
|
|
|
|
− |
|
|
|
|
|
|
|
||||||||||||||||||||
где c |
– произвольная постоянная, найдем второй собственный вектор |
a |
2 = (−c, c). |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Вычислим длины векторов |
|
1 |
|
|
и |
|
2 : |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
a |
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
1| = √ |
|
|
= c√ |
|
|
|
|
|
|
2| = p |
|
|
|
|
|
= c√ |
|
. |
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
| |
|
|
c2 + c2 |
2 |
, | |
|
|
(−c)2 + c2 |
2 |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
a |
a |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||
Отсюда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
c |
|
c |
|
|
|
|
|
1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
c |
c |
1 |
1 |
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
l1 = ( |
√ |
|
, |
√ |
|
) = ( √ |
|
|
, √ |
|
), |
|
l2 = (− |
|
√ |
|
, |
√ |
|
) = (−√ |
|
, √ |
|
). |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
c 2 c 2 |
2 |
|
|
|
2 |
|
|
|
|
|
|
|
|
c 2 c 2 |
2 2 |
|
||||||||||||||||||||||||||||||||||
4
Применяя формулу (18), составляем матрицу S :
S = √ |
√ |
! . |
||
1 |
1 |
|
||
1 |
−1 |
|
|
|
|
√2 |
√2 |
|
|
22
Связь между старыми и новыми координатами осуществляется по формуле:
|
|
|
|
|
|
|
|
y |
= |
|
|
√2 |
|
√2 |
! |
· y1 |
. |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
1 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
1 |
|
−1 |
|
|
x1 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
√2 |
|
|
√2 |
|
|
|
|
|
|
|
||||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Откуда: |
x = |
|
(x1 |
− y1), |
|
|
y = |
(x1 |
+ y1). Подставим полученные выражения в |
||||||||||||||||||||
√ |
|
|
|
|
√ |
|
|||||||||||||||||||||||
2 |
|
|
2 |
||||||||||||||||||||||||||
уравнение кривой: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
1 |
|
|
2 |
|
|
1 |
|
|
|
|
|
|
|
|
|
1 |
|
|
2 |
|
||||||
|
5 · |
|
|
(x1 |
− y1) |
|
|
− 6 · |
|
(x1 − y1)(x1 + y1) + 5 · |
|
|
(x1 |
+ y1) |
− |
||||||||||||||
|
2 |
|
|
2 |
2 |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
−24 · √ |
|
(x1 − y1) + 5 · √ |
|
(x1 |
+ y1) + 24 = 0. |
|
||||||||||||||||
|
|
|
|
|
|
|
2 |
2 |
|
||||||||||||||||||||
Раскрыв скобки и приведя подобные, получим
√√
2x21 + 8y12 − 8 2x1 + 16 2y1 + 24 = 0.
Последнее уравнение не содержит произведения координат, значит, при помощи параллельного переноса его можно привести к каноническому виду. Для этого выделим полные квадраты:
|
|
2(x12 − 4√ |
|
x1 + 8) + 8(y12 + 2√ |
|
|
y1 + 2) − 16 − 16 + 24 = 0, |
|
|
|
||||||||||||||||||
|
|
2 |
2 |
|
|
|
||||||||||||||||||||||
|
|
2√ |
2)2 + 8(y1 + √ |
|
|
|
|
|
или |
(x1 − 2√ |
|
|
+ |
(y1 + √ |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
2)2 |
2)2 |
|
|
|
||||||||||||||||
2(x1 |
− |
2)2 |
− |
8 = 0 |
= 1. |
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
√ |
1 |
|
√ |
|
|
|||||||||
Перейдем к новым координатам по формулам (14): X = x1 − 2 2, Y |
= y1 + 2. В |
|||||||||||||||||||||||||||
системе координат O1XY получим уравнение |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
X2 |
Y 2 |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
+ |
|
= 1, |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
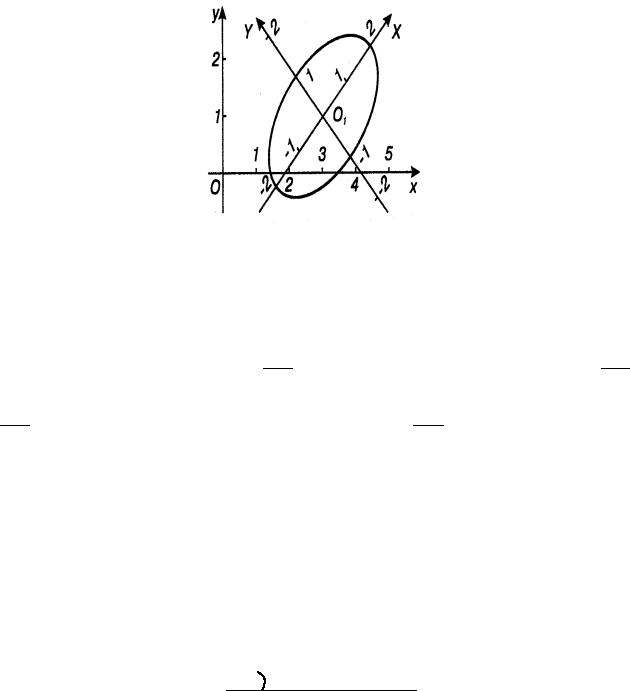
определяющее эллипс с полуосями a = 2, b = 1. Центр эллипса находится в точке, для |
||||||||||||||||||||||||||||||||||||
которой |
X |
= 0, Y = 0. Так как |
X |
= x1 − 2√ |
|
|
,1 |
|
Y = y1 + |
√ |
|
, 1то x1 − 2√ |
|
= 0, |
||||||||||||||||||||||
2 |
|
2 |
2 |
|||||||||||||||||||||||||||||||||
|
√ |
|
|
|
|
|
|
|
√ |
|
|
|
|
√ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
y1 + |
|
|
|
2 = 0, откуда x1 = 2 |
2, y1 = − 2. Но x = |
√ |
|
(x1 − y1), |
y = |
√ |
|
(x1 + y1), значит, |
||||||||||||||||||||||||
|
|
|
2 |
2 |
||||||||||||||||||||||||||||||||
|
1 |
|
|
|
√ |
|
√ |
|
|
1 |
√ |
|
|
|
√ |
|
|
– координаты точки O1 в системе |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
x = |
|
√ |
|
(2 |
|
2 − (− 2)) = 3, |
y = |
√ |
|
(2 |
2 − 2) = 1 |
|||||||||||||||||||||||||
|
2 |
2 |
||||||||||||||||||||||||||||||||||
Oxy. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Чтобы построить искомую кривую, в системе координат Oxy наносим точку O1(3, 1),
из точки |
O1 строим векторы |
|
1 |
1 |
|
и |
|
1 |
1 |
|
которые задают оси O1X |
||||||||
l1 = ( |
√ |
|
, |
√ |
|
) |
l2 = (− |
√ |
|
, |
√ |
|
), |
||||||
2 |
2 |
2 |
2 |
||||||||||||||||
и O1Y соответственно. Затем на оси O1X откладываем полуоси 2 и −2 , а на оси O1Y
– полуоси 1 и −1 и рисуем эллипс.
5
4.Полярная система координат
Выберем на плоскости некоторую фиксированную точку O – начало координатной системы, или полюс. Фиксированный луч с выбранным на нем единичным вектором и с началом в полюсе назовем полярной осью.
Положение любой точки M на плоскости можно определить упорядоченной парой
чисел: длиной r радиуса-вектора OM и углом ϕ между полярной осью и OM . Угол считается положительным, если направление вращения от оси к радиусу-вектору берется против часовой стрелки. Запись M (r, ϕ) показывает, что длина радиуса-вектора
|OM | = r, а угол между полярной осью и радиусом OM равен ϕ. Числа r и ϕ называются полярными координатами точки M. Длина радиус-вектора r для разных точек плоскости может меняться от 0 до +∞, полярный угол ϕ определяется с точностью до слагаемого, кратного 2π .
Установим связь между декартовыми и полярными координатами точки M.
Поместим начало декартовой системы координат в полюсе полярной системы и направим |
||||||||||||||||||||
ось абсцисс по полярной оси.y |
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
r |
r M |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
ϕ |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
||
|
|
|
|
| |
|
|
|
x |
|
} |
|
|
|
|
||||||
Тогда |
|
|
|
|
{z |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
x = r cos ϕ, |
|
|
y = r sin ϕ ϕ [0, 2π) |
|
(19) |
||||||||||||
и |
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
y |
|
|
y |
||
r = px2 + y2, |
cos ϕ = |
|
|
|
, |
sin ϕ = |
|
|
, |
|
||||||||||
|
|
x2 + y2 |
|
x2 + y2 |
tg ϕ = x . |
|||||||||||||||
|
|
|
|
|
|
p |
|
|
|
|
p |
|
|
|
|
|
||||
Для построения линии, заданной уравнением в полярной системе координат, используют метод построения "по точкам": вычисляют координаты ряда точек линии и соединяют эти точки плавной кривой.
Пример 4.
6
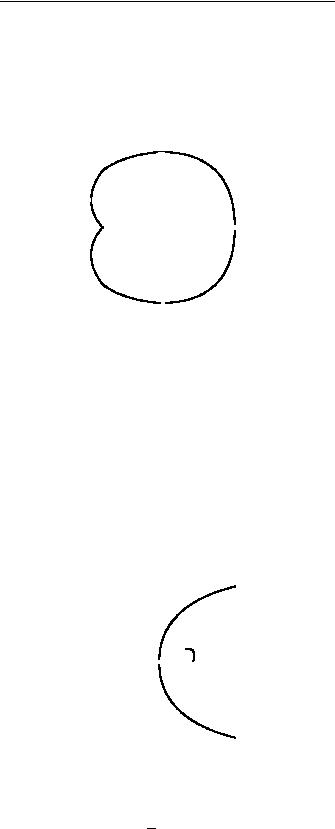
Построить линию r = 2(1 + cos ϕ). Решение. Составляем таблицу.
|
ϕ |
0 |
π/6 |
π/3 |
π/2 |
2π/3 |
5π/6 |
|
π |
|
|||
|
|
4 |
√ |
|
|
|
|
|
√ |
|
|
|
|
|
r |
2 + 3 |
|
3 |
2 |
1 |
2 − 3 |
0 |
|
||||
Так как cos ϕ = cos(2π − ϕ), то вычислять значения при |
π < ϕ < 2π не нужно. |
||||||||||||
Кривая симметрична относительно полярной оси. Нанося соответственные точки на чертеж и соединяя их плавной линией, получаем вид рассматриваемой линии. Эта линия называется кардиоидой.
|
|
|
r |
|
r |
|
r |
|||||
|
|
|
|
|
|
|||||||
|
|
|
|
"""" |
|
|
|
|||||
|
r |
|
|
|
|
|
||||||
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
"" |
|
|
|
|
|
|
|
||
|
" |
" |
|
|
|
|
|
|
|
|
- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5.Полярное уравнение эллипса, гиперболы и параболы
Пусть дана линия L – эллипс, гипербола (будем рассматривать какую-нибудь одну ее ветвь) или парабола. Пусть F – фокус линии, g – соответствующая этому фокусу директриса.
Введем полярную систему координат так, чтобы полюс совместился с фокусом, а полярная ось совпала с фокальной осью линии L в направлении от директрисы g к фокусу.
g |
|
|
|
|
|
|
L |
|
d |
M |
|||||
|
|
||||||
|
|
|
P |
|
r |
|
|
S |
|
|
|
|
|
||
|
|
|
r |
|
|
||
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
ϕ |
|
- |
|
D |
|
|
F |
N |
|
||
|
|
|
|
|
|
|
|
Рассмотрим на линии L произвольную точку M. Ее полярные координаты обозначим r и ϕ : M (r, ϕ). Для эллипса, гиперболы и параболы справедливо соотношение
dr = ε,
7
где ε – эксцентриситет линии, r – расстояние от точки до фокуса, d – расстояние от точки до директрисы.
|
d = |DN | = |DF | + |F N | = |DF | + r cos ϕ. |
(20) |
||||||||||
Пусть P – точка на линии L расположена так, |
что F P r DN |
и |F P | = p, где p |
||||||||||
– фокальный параметр линии L. Вследствие соотношения |
d = ε имеем для точки P : |
|||||||||||
|F P | |
= ε, откуда |
|
|
|
|
|
|
|
|
|
|
|
|SP | |
|
|
|
|
|
|F P | |
|
p |
|
|
|
|
| |
SP |
| |
= |
|
= |
, |
|
|
||||
|
|
|
|
|||||||||
|
|
|
|
ε |
ε |
|
|
|||||
но |SP | = |DF |, следовательно, |DF | = pε . Подставив |DF | |
в (20), получим |
|||||||||||
|
|
d = |
|
p |
+ r cos ϕ |
|
|
|||||
|
|
|
|
|
|
|
||||||
|
|
|
ε |
|
|
|||||||
и, наконец, подставив d в соотношение |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
r |
= ε, |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
d |
|
|
|
|
|||
будем иметь
r
p/ε + r cos ϕ = ε
или |
p |
|
|
|
|
||
r = |
|
. |
(21) |
1 − ε cos ϕ |
|||
Это и будет полярное уравнение эллипса, гиперболы и параболы.
8