-
Структура систем цос. Структура систем сбора данных
Структура
цифровых информационно-управляющих
систем (ИУС) для общего случая представлена
на блок-схеме Типовая цифровая ИУС
состоит из четырёх составляющих систем:
1) ОУ – объекта управления; 2) ССД
– системы сбора данных; 3) СОИ –
системы обработки информации; 4) СВУ
– системы выработки управления. системы
ОУ, ССД, СОИ и СВУ-прямоугольники;
стрелки-направления движения входной
и выходной информации. 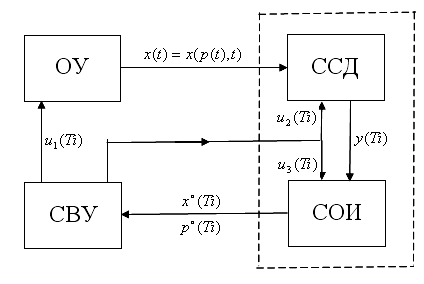
Система ЦОС, являющаяся частью ИУС, состоит из ССД и СОИ и помещена в пунктирный прямоугольник. Функционирование систем ЦОС, как правило, не осуществляется отдельно от ОУ и СВУ. Реализация ЦОС почти всегда производится с учётом особенностей информации от ОУ и требований к информации для СВУ.
ОУ – объект управления – характеризуется векторами входных управляющих переменных и векторами выходных переменных, которые в ряде случаев определяются как векторы фазовых координат – векторные параметрические функции.
Решение задач ЦОС, в ряде случаев, может быть сопряжено с необходимостью построения для ОУ математических моделей, которые связывают зависимостями входные и выходные переменные. В простейшем случае для статических ОУ связь между входными и выходными переменными определяется модельными нелинейными функциями от нескольких переменных, которые можно представить в скалярном или векторном виде:
(1.1.1)
. (1.1.2)
Связь между векторами управляющих переменных и векторами фазовых координат для динамических ОУ определяется системами модельных дифференциальных уравнений. Для динамических ОУ с сосредоточенными параметрами модельные дифференциальные уравнения в векторном виде представляются следующим образом:
.
ОУ с распределёнными параметрами описываются модельными дифференциальными уравнениями с частными производными.
Необходимо отметить отличия параметрических функций и управляющих переменных . Управления являются полностью известными; параметрические функции – некоторые неизвестные функции, относительно которых могут быть сведения только об их самых общих характеристиках.
В инженерной практике ЦОС иногда рассматриваются чрезвычайно сложные ОУ, функционирование которых не может быть адекватно описано с достаточной точностью предлагаемыми статическими или динамическими моделями. В этом случае описание моделей ОУ осуществляется с привлечением теоретико-вероятностных представлений.
ССД – система сбора данных – обеспечивает промежуточное накопление и предварительную цифровую обработку многоканальной информации об объекте управления. На вход системы ССД поступает вектор фазовых координат и вектор управления , реализующий настройку ССД. Выходом ССД являются векторы наблюдений фазовых координат, связанные с фазовыми координатами и помеховыми возмущениями , которые обусловливают погрешности в наблюдениях. Наблюдения описываются следующей модельной зависимостью:
, (1.1.3)
где вид модельной функции наблюдения определяется конструкцией ССД.
СОИ – система обработки информации – обеспечивает по входной информации-наблюдениям от ССД и вектору управления который предназначен для настройки алгоритмов СОИ, решение задачи вычисления оценок фазовых координат и оценок параметрических функции , которая, по-существу, является центральной для ЦОС.
СВУ – система выработки управлений – осуществляет формирование необходимых управляющих воздействий для ОУ, для ССД и для СОИ по информации от СОИ. В общем виде можно записать: .
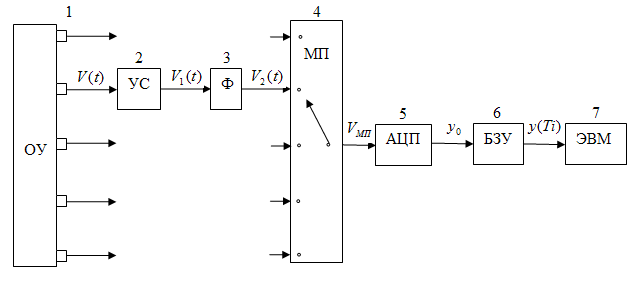
Структура ССД существенным образом определяет возможности проведения ЦОС. ССД состоит из системы датчиков, усилителей, противомаскировочных фильтров, электронных коммутаторов, аналого-цифровых преобразователей и устройств буферной памяти. упрощённой конструкции ССД, цифрами отмечены основные элементы системы.