

1. Математическое описание процесса квантования.
(в лекциях p=τ, u=r)
(t) |
Аналоговый |
|
сигнал |
(0) (T) (2T)
t
T |
2T |
3T |
4T 5T |
6T |
|
(t) |
|
|
|
|
*(t) (*) |
|
|
АЦП |
|
||
*(t) |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
Обозначение |
|
|
|
|
|
-функции |
|
|
|
|
|
t |
T |
2T |
3T |
4T 5T |
6T |
|
Т – период дискретности (квант);
Т=const
р– ширина импульса Будем считать, что р 0.
В таком случае нужно переходить к - функции.
(*–квантованный сигнал)
р= площадь -функции.
u*(t) – последовательность единичных
-функций. Площадь импульсов – амплитуда (0), (T), (2T).
1 |
|
|
0 |
|
t |
T |
2T 3T 4T 5T 6T |
|
|
u*(t) = (t-kT) |
|
k |
0 |
*(t) = (t)u*(t) = (kT) (t-kT)
k 0
*(t) = 0 (kT) (t-kT)
Дискретизацию (квантование) на схемах изображают так:
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
Запишем преобразование Лапласа дискретного по времени сигнала: |
|
|||||||||||||
|
(t) |
|
|
*(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
E(s) |
|
T |
E*(s) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
E *(s) L[ *(t)] *(t)e st dt (kT ) (t kT )e st |
|
t kT dt (kT )e skT |
||||||||||||
|
|
|
|
0 |
|
|
|
|
k 0 |
0 |
|
|
k 0 |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
E *(s) (kT )e skT |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
k 0 |
|
|
|
Вычисление этого преобразования – очень трудоемкий процесс. |
|
|||||||||||||
Другой способ вычисления – используя преобразование Фурье: |
|
|||||||||||||
|
|
|
|
1 |
|
|
2 k |
|
|
|
|
|
||
u *(t) (t kT ) |
|
e j |
|
t |
|
|
|
|
||||||
T |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
||||||||
|
|
k 0 |
|
T k |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
1 |
|
|
2 k |
|
; 0 2 |
|
|
|
|
*(t) (t) |
|
e j |
T |
t |
|
|
|
|||||||
|
|
|
|
|
T k |
|
|
T |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
E *(s) |
E(s jk 0 ) |
|||
|
|
|
|
|
|
|
|
|
|
|
T k |
|
|
|
Все равно бесконечный ряд. Но здесь ценна физическая трактовка. |
||||||||||||||
|
|
1 |
|
|
1 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
E *(s) |
T |
E(s) |
T |
E(s jk 0 ) E(s |
jk 0 ) |
|
||||||||
|
|
|
|
k 1 |
|
|
k |
|
|
|
|
|||
В фигурных скобках – ВЧ составляющие. |
|
|
|
|
||||||||||
E * (s) – не существует |
|
|
|
|
|
|
|
|||||||
E(s) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таким образом, не существует передаточной функции идеального квантователя |
||||||||||||||
E *(s) |
1 |
E(s) (при условии, что стоит фильтр низких частот) |
||||||||||||
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
Формула очень грубая, но в первом приближении ее можно теоретически рассматривать. |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
гр |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Для передачи сигнала без потери информации |
|
|
||||||||||||
|
2 |
; гр = 2 fгр |
|
|
|
|
|
|
|
|
||||
0 |
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
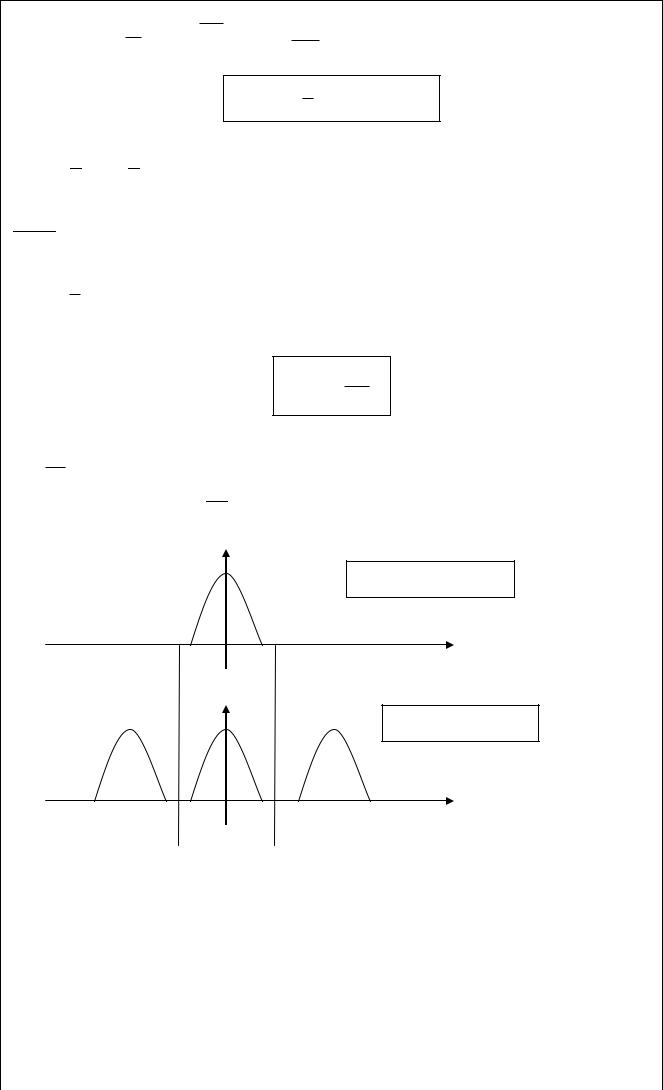
Теорема Котельникова: |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|E(j )| |
|
|
Непрерывный сигнал |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
-(3/2) 0 |
- 0 |
-(1/2) 0 |
|
|
(1/2) 0 |
0 |
(3/2) 0 |
|
|||||
|
|
|
|
|
|
|
|
|
|
|E*(j )| |
|
|
|
Дискретный сигнал |
|
-(3/2) 0 |
- 0 |
-(1/2) 0 |
|
|
(1/2) 0 |
0 |
(3/2) 0 |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
2.Передаточные функции аналого-цифровых и цифро-аналоговых преобразователей.
АЦП.
E(t) |
E*(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
* (t) (kT ) (t kT ) |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
E(s) T |
E*(s) |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
k 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
E *(s) L *(t) (kT) (t kT)e st dt (kT) *1*e skT |
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
k 0 |
|
|
|
|
|
0 |
|
|
|
|
|
|
k 0 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
E * (s) (kT)e skT |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
k 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Применим ряды Фурье: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
1 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
u * (t) (t kT) |
|
e j |
|
|
|
|
kt |
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
T |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
k 0 |
|
|
|
T k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|||||
* (t) (t)u * (t) (t) |
|
|
|
e j |
|
kt |
|
|
|
|
|
|||||||||||||||||||||
|
|
T |
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
Преобразование Лапласа: |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T k |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
L * (t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
j |
2 |
kt |
||||||||
E * (s) * (t)e st dt (t) |
e |
|
T |
e st dt |
||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
0 |
T k |
|
|
|
||||
|
|
1 |
|
|
( s j |
2 |
k )t |
|
1 |
|
|
2 |
|
|
|
|
|
|||||||||||||||
E * (s) |
|
|
|
(t) e |
|
T |
|
dt |
|
|
|
|
|
E(s j |
|
k) |
|
|
|
|
|
|||||||||||
T |
|
|
|
|
|
|
T |
|
T |
|
|
|
|
|
||||||||||||||||||
|
|
0 |
|
k |
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
||||||||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
E * (s) |
|
E(s j 0 k) , где |
0 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
T k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
||||||
E * (s) – не существует
E(s)
Таким образом, не существует передаточной функции идеального квантователя Предположим, что дальше стоит фильтра низких частот, тогда с очень большой натяжкой
E * (s) T1 E(s)
|
|
|
|
Передаточная функция АЦП W (s) |
E * (s) |
|
1 |
, |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
АЦП |
|
E(s) |
T |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
δ(t) |
||||
|
δ(t) |
но практически ее не существует. |
|
|
|
|
δ*(t) |
|
|
|||||||||||
|
|
|
|
|
|
ЦАП |
||||||||||||||
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
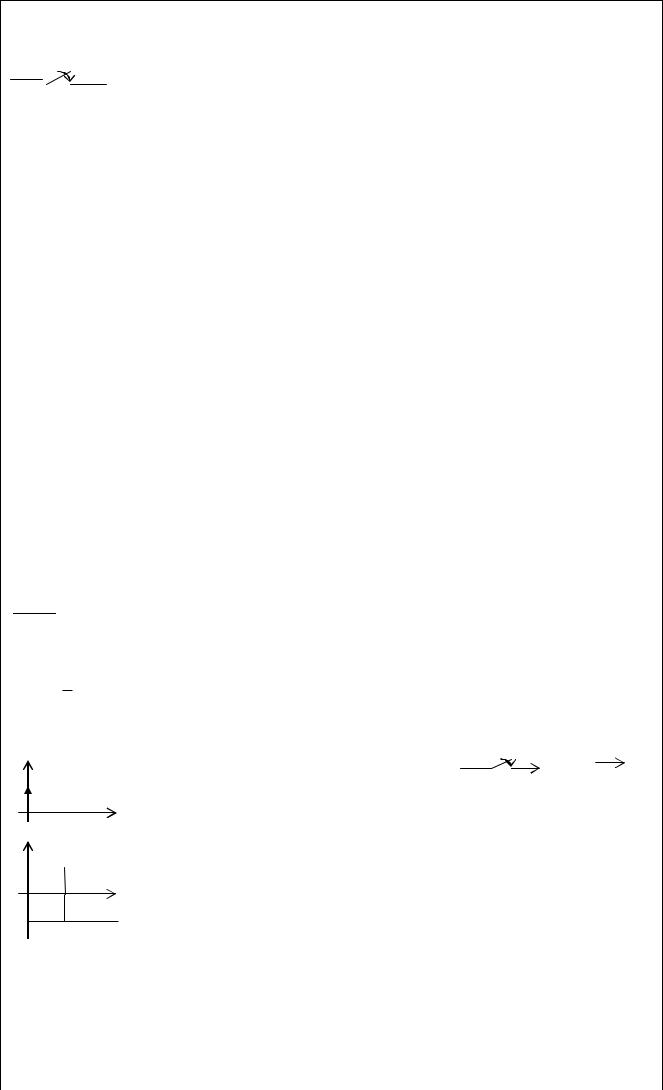
ЦАП. Нужно поставить НЧ-фильтр с идеальной |
|
|
|
||||||||||||
1 |
|
|
|
|
T |
|||||||||||||||
|
|
|
|
|
|
t |
прямоугольной частотной характеристикой. Если через него пропустить |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
сигнал, то останется только центральная часть . В ТУ такой фильтр |
||||||||||
0 |
|
T |
|
2T |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
ЦАП держит сигналназывается экстраполятором. Экстраполятор 0-го порядка. |
||||||||||||||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
На выходе разрывная |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|||
0 |
функция |
T |
|
|
|
Функция должна держать импульс, поданный на вход, весь период |
||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||
-1 |
|
|
|
|
|
|
|
|
дискретизации. |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
На выходе получается кусочно-непрерывный сигнал с разрывами 1-го порядка, но он |
|||||||||||||||||||
является аналоговым. На вход подается единичная δ-функция. |
|
|
|
|||||||||||||||||
W |
(s) |
1 |
|
1 |
e sT |
1 e sT |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
Э0 |
|
|
|
s |
|
|
|
s |
|
s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
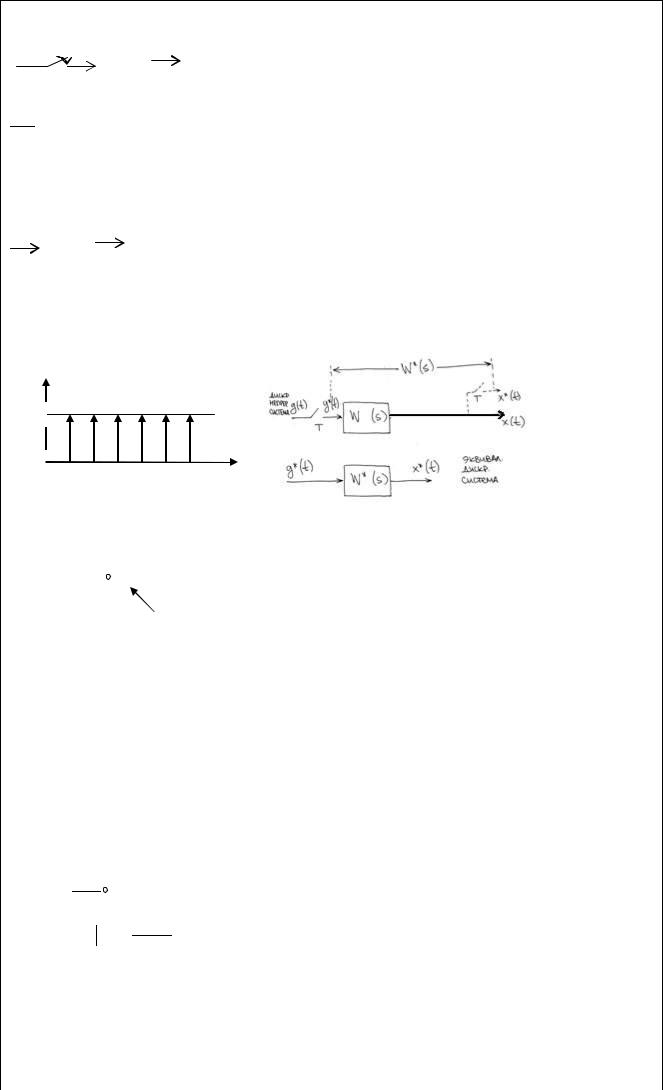
3. Передаточные функции дискретно-непрерывных устройств управления.
g(t) |
g*(t) |
|
x(t) |
X(s)=G*(s)W(s) |
|||
W(s) |
|||||||
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
G(s) |
T G*(s) |
|
X(s) |
|
|
|
|
не существует, следовательно, передаточной функции не существует в рамках
дискретно-непрерывной модели (л.д.-н.с)
Введем фиктивный ключ (при этом теряем информацию в межтактовые моменты времени). Перейдем к рассмотрению эквивалентной дискретной модели:
g*(t) |
|
|
x*(t) |
X*(s)=G*(s)W*(s), где |
||
|
W*(s) |
|
|
|
, |
|
|
|
|
|
|
||
|
|
|
|
|||
G*(s) |
|
X*(s) |
|
|
|
|
|
|
|
|
|
|
|
Определим передаточную функцию W*(s) дискретной системы x*(t) = x(t) u*(t)
1 |
|
|
0 |
|
t |
T |
2T 3T 4T 5T 6T |
u*(t) = (t-kT) – последовательность -функций
k 0
X * (s) |
1 |
X ()U * (s )d |
|
|
||
2j |
|
|
||||
|
|
|
|
|
||
дробно - рациональная функция |
|
|
|
|||
X*(s) = L[ x*(t) ] |
|
|
|
|||
U*(s) = L[ u*(t) ] |
|
|
|
|||
X(s) = L[ x(t) ] |
|
|
|
|||
|
|
|
|
1 |
||
U * (s) L[u * (t)] L[ |
(t kT)] 1* e ksT 1 1e sT 1e 2sT ... |
|||||
|
|
|||||
1 e sT |
||||||
|
|
k 0 |
k 0 |
|||
- осуществляем преобр. в пространство изображений
U * (s )
1
X *(s) 2j
|
|
|
1 |
|
|
|
|
|
|
|
- подставляем вместо s (s – λ) |
||
1 e sT e T |
|
|||||
X () |
1 |
d |
||||
|
|
|||||
1 e sT e T |
||||||
M () D()
Функция дробно-рациональная , следовательно, можно использовать теорию вычетов
4
X* (s) n Re sX ( ) i 1 e 1iT e sT
i1
сумма по всем полюсам
|
|
|
n |
|
|
|
|
1 |
||
W * (s) Re sW ( ) |
|
|
|
|
||||||
|
|
|
||||||||
|
|
|
|
|||||||
|
i |
|
e sT e T |
|||||||
|
|
i 1 |
|
1 |
||||||
|
|
|
||||||||
Пример |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Осуществим расчет дискретной передаточной функции:
2 |
k |
|
1 |
|
|
|
|
1 |
|
|
|
|
W * (s) Re s |
|
|
|
|
|
|
|
|
||||
|
|
1 |
|
1 e sT esiT |
|
|||||||
i 1 |
T1 |
s(s |
) |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|||||
|
|
|
T1 |
|
|
|
|
s1 0 |
||||
|
|
|
|
|
|
|
s 2 |
1 |
|
|||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
T |
||
|
|
|
|
|
|
|
|
|
|
|
||
|
k |
[ |
1 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|||||
|
|
|
|
1 |
|
1 e sT e0T |
|||||||||||||||
|
T1 0 |
|
|
|
|
|
|
||||||||||||||
|
T1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Re sW (s) |
|
s si |
|
|
M (s) |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||
|
|
D' (s) |
|
s si |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
||
( ) |
|
|
k(1 e T1 )e sT |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
(1 e sT )(1 e sT e |
|
T1 ) |
|||||||||||||||||
|
1 |
|
|
1 |
|
|
]( ) |
||
|
|
|
|
|
|
|
|||
|
1 |
|
|
|
T |
|
|||
|
|
|
|
1 e sT e |
T1 |
|
|
||
T1 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
||
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
k(1 e T1 |
)esT |
|
|
W * (s) |
|
|
|
|
T |
|
||
|
|
|
|
|
||
|
|
|
|
|
||
|
(esT 1)(esT |
e |
T1 ) |
|
||
Формула работает только, если нет кратных полюсов(!) W*(s) – трансцендентная относительно переменной Лапласа
5
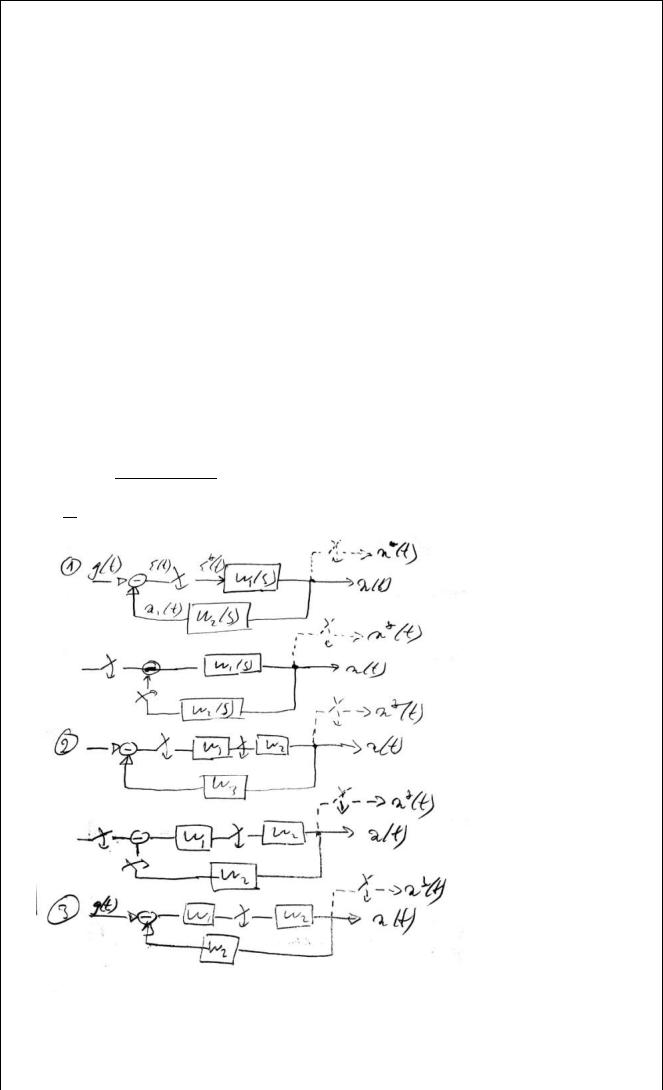
4.Структурные преобразования ДНС
1) E*(s)=G*(s)-X1*(s), X1(s)= E*(s)W1(s)W2(s), X1*(s)= E*(s)[W1(s)W2(s)]*= E*(s)W1W2*(s) X*(s)= E*(s)W1*(s)
X *(s) G *(s) |
|
W1 *(s) |
||
1 W W *(s) |
||||
|
|
1 |
2 |
|
Ф*(s)=X*(s)/G*(s) |
|
|||
Ф * (s) |
W1 * (s) |
|
||
1 W W * (s) |
|
|||
1 |
2 |
|
||
2) E*(s)=G*(s)-X1*(s),
X1*(s) = E*(s)W1*(s)W2W3*(s),
X * (s) G * (s) |
|
W1 * (s)W2 * (s) |
||
1 W * (s)W W * (s) |
||||
|
1 |
2 |
3 |
|
Ф *(s) |
|
W1 *(s)W2 *(s) |
||
1 W *(s)W W *(s) |
||||
|
1 |
2 |
3 |
|
3) (лучше не писать, подозрительно)
X *(s) G *(s) W1 *(s)W2 *(s) 1 W1W2W3 *(s)
ПФ = не существует
6

5. Основы теории z-преобразования.
Z=esT s=σ+jω, s – комплексная переменная.
ReZ= eTσcosωT ImZ= eTσsinωT
z-преобразование используется только для дискретных по времени сигналов. X(z) – z- преобразование сигнала x*(t), если x(t), то предполагается, что сигнал квантуется по времени.
Таким образом основная полоса преобразуется в окружность единичного радиуса. Причем полюса, находящиеся в левой полуплоскости, лежат внутри круга.
Доп. полюса наложатся точно также. Следовательно, вся левая полуплоскость отражается в круг единичного радиуса.
W(s) 3-го порядка, λi – полюса. W*(s) -> появляется полоса 20 . Полюса повторяются, так
как появляется трансцендентная модель.
Z=esT s=jω
точки: 1) s=0 2) |
0 |
|
2 |
3) |
s j |
0 |
|
4) |
s j |
0 |
|
T |
2 |
2 |
|||||||||
|
|
|
|
|
|
|
|
|λi |< 1 для всех полюсов в левой полуплоскости, она находятся внутри окружности. Для 2-й полосы полюсы в z-плоскости получаются те же. Проблема трансцендентности снимается.
|
|
|
|
n |
|
|
|
|
|
|
1 |
|
|
||
W * (s) Re sW (s) |
|
|
|
|
|
||||||||||
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|||||||||
|
s i |
1 e sT e iT |
|||||||||||||
|
|
|
i 1 |
|
|
|
|
||||||||
|
|
|
n |
|
|
|
|
|
|
1 |
|
|
|||
W (z) Re sW (s) |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
||||||
|
s i 1 |
z 1e iT |
|||||||||||||
|
|
|
i 1 |
|
|||||||||||
W (z) |
M (z) |
, где M(z) и D(z) – дробно-рациональные ф-ии |
|||||||||||||
|
|
||||||||||||||
|
D(z) |
|
|
|
|
|
|
|
|
|
|
||||
Пример |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W *(s) |
|
k(1 e T / T1 )est |
|
|
|
|
|
|
|
|
|
|
|||
(est 1)(est e T / T1 ) |
|
|
|
|
|
|
|
||||||||
W * (s) |
|
k(1 e T / T1 )z |
|
|
|
|
|
|
|
|
|
|
|
||
|
(z 1)(z e T / T1 ) |
|
|
|
|
|
|
|
|
|
|
||||
Теоремы z-преобразований:
1) Теорема о начальном значении: lim x(kT ) lim X (z) . Если x(t) имеет z-преобрахование, и |
|
k 0 |
z |
предел существует, то выполняется теорема, и начальное значение функции равно пределу. 2) Теорема о конечном значении: Если x(t)->X(z) для любого |zi| < 1 и если функция (1-z-
1)X(z) не имеет полюсов вне единичной окружности, то |
lim x(kT ) lim(1 z 1 )X (z) . |
||||
|
|
|
|
k |
z 1 |
Обратное z-преобразование: x(kT ) |
1 |
|
X (z)z k 1dz |
|
|
|
|
|
|
||
2 j |
|
|
|||
|
|
|
|
||
|
|
|
7 |
|
|
6. Методы анализа устойчивости цифровых систем.
Замкнутая система
G(z) |
|
X(Z) |
|
|
|
Ф(z) |
|
|
|
||
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
1+W(z)=0 => anzn+an-1zn-1+…+a1z+a0=0 |
|||||
полюса – z1…zn |
|
|
|
||
Система устойчива |
для всех полюсов |
||||
1)алгебраические критерии. - критерий Гурвица - критерий Шур-Кона
Они оперируют с коэффициентами an, an-1, …, a1, a0. По алгебраическим критериям нельзя определить запасы устойчивости.
2)частотные критерии
Критерий Найквиста для дискретного случая остается практически неизменным, за исключением того, что меняется на :
Для того, чтобы ЛДС была устойчива в замкнутом состоянии, необходимо и достаточно, чтобы ее частотные характеристики в разомкнутом состоянии обладали следующими свойствами: число переходов фазовой характеристики через прямую -180 ( -540, … ) при L() > 0 равнялось m/2 (m-число полюсов в правой полуплоскости в разомкнутом состоянии).
Переход сверху–вниз с минусом, снизу-вверх с плюсом
8

7. |
Применение билинейного |
преобразования |
к передаточным функциям |
|
разомкнутых систем управления. |
|
|
пл. s |
пл.z |
пл.w |
|
z = ej T = cos( T) + jsin T |
|
|
||||
w j |
|
sin T |
jtg |
T |
j tg 2 |
|
1 cos T |
2 |
|||||
|
|
|
|
|
|
T |
Вводится новая плоскость – разворачиваем окружность единичного радиуса в левую полуплоскость.
z1 w
1 w
w z 1 z 1
- псевдочастота (безразмерная величина)
– чисто мнимая переменная, окружность снова разворачивается в левую полуплоскость. Связь псевдочастоты с кр. частотой :
tg T
2
0 |
0 |
0 |
|
2 |
0 |
|
|
2 |
T |
||||||
|
|
|
|
|
если , то зависимость линейная
j |
j |
||
|
|
|
|
|
пл. S |
|
пл. w |
|
|
|
|
u |
u |
0 |
0 |
0 <+ |
0 <+ |
При применении сначала z-, а затем w-преобразования к передаточной функции получим W(w). Появятся типовые звенья, но уже от w, а не от s.
W (w) k(T2 w 1)(...)...(...) w(T1w 1)(...)...(...) ;
s = j w = j
- псевдочастота
9

8.Построение логарифмических амплитудной и фазовых характеристик, записанных относительно псевдочастоты.
j |
j |
||
|
|
|
|
|
пл. S |
|
пл. w |
|
|
|
|
u |
u |
0 |
0 |
0 <+ |
0 <+ |
Видно, что преобразование нелинейное.
tg |
T |
|
T |
(при малых T) |
|
2 |
|
2 |
|
W (w) w j w( j )
L(),дБ = 20 lg |w(j )| (), рад = arg (w(j )) 0 < +
W(s) W*(s) W(z) W(w)
1
W *(s) T k w(s jk 0 )
Технически мы вернулись в рамки типовых звеньев, но физический смысл в этом искать нельзя.
W (w) k(T2 w 1)(1 w) - всегда появляются НМФ звенья (как минимум, одно).
w(T1w 1)
π 40
|
-20 дб/дек |
-40 дб/дек |
|
|
|
|
|
|
|
|
|
|
|
20 |
π / 2 |
|
-20 дб/дек |
|
0 дб/дек |
|
|
|
|
|
|
||
0 |
с |
|
||||
|
|
k |
||||
|
|
|
||||
-20 |
-π / 2 |
|
|
|
|
|
-40 |
-π |
|
|
|
|
|
|
НЧ |
СЧ |
ВЧ |
|
||
|
0.1 |
1 |
10 |
|
||
0 0/2 0 +
В первоначально построенной характеристике отсутствует частота среза. Получить ее можно, варьируя k сделать звено устойчивым (на схеме – точечный пунктир).
kk
нk
Критерий Найквиста для дискретного случая остается практически неизменным, за исключением того, что меняется на :
10