

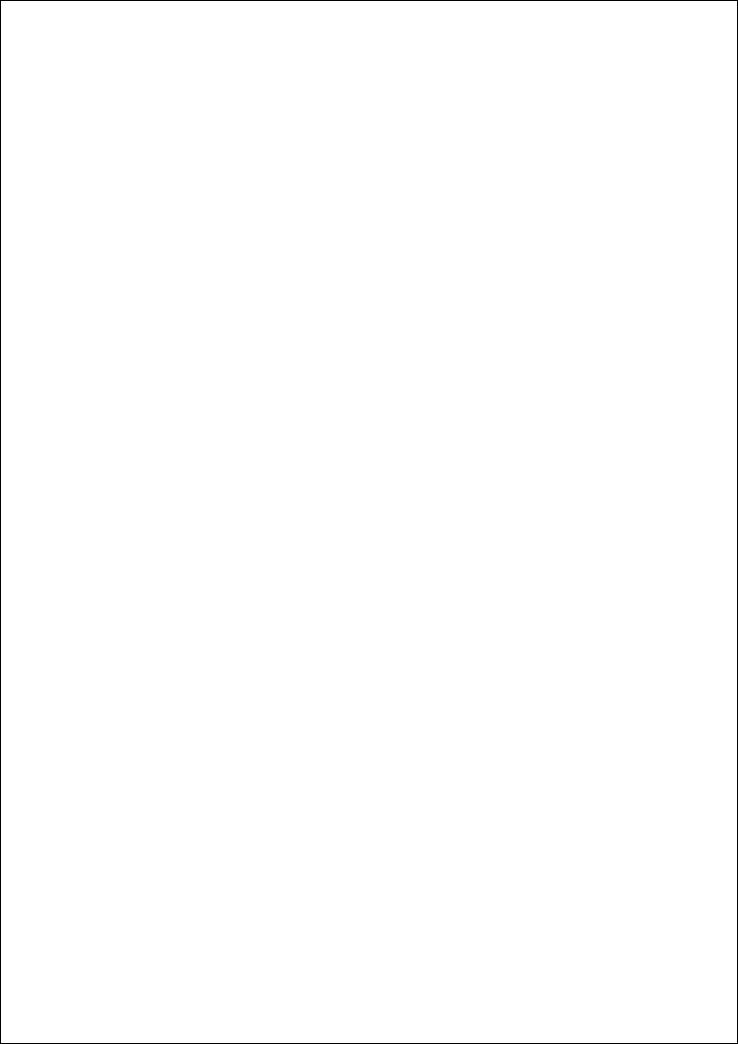
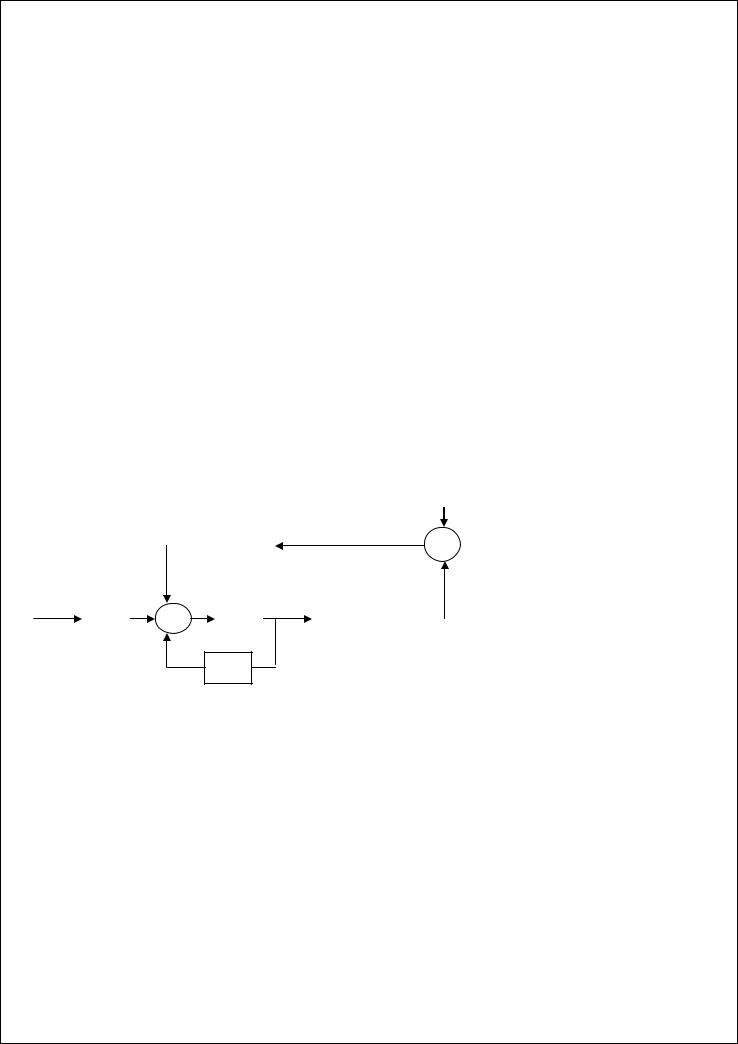
1.Структура систем управления.
Задача систем управления заключается в том, чтобы обеспечить заданные параметры развития тех или иных процессов.
Современные системы управления заключают в себя следующие компоненты:
|
|
(t) |
|
(t) |
|
|
|
|||||
u(t) |
Процесс (ОУ) |
x(t) |
Измерительная |
yизм(t) |
||||||||
|
|
|
|
|
|
система |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Внешняя СУ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Управляющее |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
устройство |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
x * (t), u * (t) |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
Блок формирования |
|
|
|
|
|
|
||
|
|
|
|
эталонного процесса |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ˆ |
|
|
|
|
|
|
|
|
|
|
|
|
x, p |
|
|
|
|
|
|
|
u(t) |
|
|
|
|
|
yизм (t) |
|
|
|
||
|
|
|
Информационный |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
блок |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u(t) – функция управления
(t) – функция возмущения (возмущение) x(t) – состояние процесса
yизм – функция измерения системы (t) – функция шумов
Измерительная система – система датчиков, измеряющая параметры системы. Управляющее устройство – система типа вход-выход, где формируются законы управления.
x*,u* - эталонный процесс (пара функций, определяющих динамику изменения состояния и управления процессом )
Для работы блока формирования эталонного процесса необходима информация о действительном протекании физического процесса, т.е. функции u(t) и yизм- для информационного блока.
xˆ, p – система идентификации и оценки параметров процесса.
x – оценка состояния данного процесса p – оценка параметров системы
Существует также внешняя СУ, ее назначение – формирование внешних команд.
Если система не содержит внешнего управления, она наз. Автономной или самодостаточной.
1
2.Управляемость динамических систем.
Управляемость динамических систем является их важнейшей характеристикой и определяет условия, при которых задача управления имеет решение, то есть существует одна или несколько функций входа, называемых управлениями, под действием которых динамическая система может перейти в любое наперед заданное состояние.
|
|
Будем говорить, что динамическая система управляема относительно начального состояния x(t0 ) |
|
|
|
если существует управление u(t) из класса кусочно-непрерывных функций, которое переводит систему |
|
|
t0 0 |
из начального состояния в x(t f ) 0 за конечное время t f |
|
Если динамическая система управляема относительно любого начального состояния, то данная система полностью управляема.
Найдем Математические условия управляемости линейных динамических систем с постоянными
параметрами. |
|
|
|
|
|
|
|
|
|
|
|
|
Предположим, что начальное состояние удовлетворяет условию: |
(t |
|||||||||||
xT |
) 1, |
некоторый n-мерный |
||||||||||
|
|
|
|
|
|
|
|
|
0 |
|
|
|
Задано конечное состояние |
|
) 0 |
|
под действием которого система |
||||||||
вектор. 0 |
x(t |
f |
и управление u , |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
||
переходит в это состояние. |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
T |
|
||
|
|
|
|
|
|
|
|
|
|
|
||
Исходная система x(t) Ax(t) Bu(t) и сопряженная система (t) A (t) , где примем (t0 ) .
Определим производную от скалярного произведения векторов состояния исходной и сопряженной систем:
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dx(t) |
|
d(t) |
|
dx(t) |
|
d(t) |
|
|
|
|
|
|||||||
|
(x(t), (t)) ( |
|
, (t)) |
(x(t), |
|
) ( (t), |
|
) ( |
|
, x(t)) |
|
|
|
|
|
|||
dt |
dt |
dt |
dt |
dt |
|
|
|
|
|
|||||||||
|
|
|
|
T |
|
|
|
|
|
|
|
|
T |
|
|
|
T |
|
( (t), Ax(t) Bu(t)) |
( A |
(t), x(t)) ( (t), Ax(t)) ( (t), Bu(t)) ( A |
(t), x |
(t)) |
|
(t)Bu(t) |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
Так как x, Ay |
AT x, y , то 1 и 3 сокращаются. |
|
|
|
|
|
|
|
|
|
Проинтегрируем это уравнение на интервале t0 , t f |
T |
|
T |
|
|
t f |
T |
|
||
: x |
(t f ) (t f |
) x |
(t |
0 ) (t0 ) |
|
(t)Bu(t)dt 1 (1), |
||||
|
|
|
|
|
|
|
|
t0 |
|
|
T |
|
|
|
|
|
|
|
|
||
(t) e A |
|
(t t0 ) (t) - вектор состояния сопряженной системы. Запишем систему из n соотношений |
||||||||
для функции |
и ее (n-1) производной |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Данную систему |
можно записать в матрицу вида : T (t)G V T (t) (2) , G –матрица n x nm, |
|||
n-1 |
|
T |
(t) - вектор 1x mn. |
|
G=[B:AB:…:A |
B]. V |
|
||
Матрицу G часто называют матрицей управляемости.
Для управляемости системы необходимо и достаточно, чтобы ранг G был равен порядку системы. rang G=n
Док-во необходимости: u(t) - управление, под действием которого система переходит из начального
|
) 0 , предположим, что rang G<n. |
состояния в состояние x(t f |
|
|
|
|
|
Согласно условию (1) (t) явл. однозначн. функцией, отличной от 0 для t t0 ,t f , поэтому если rang |
||||
|
|
|
|
|
G<n, матричное уравнение (2) |
будет иметь ненулевое решение относительно , |
V (t) 0 . А если |
||
|
|
|
|
|
V (t) 0 , |
|
|
|
|
|
t f |
|
|
|
T (t)B 0 |
T (t)Bu(t)dt 0 |
- противоречит условию 1 для управляемости исх. |
||
|
t0 |
|
|
|
системы необходимо rang G=n. |
|
|
|
|
|
|
|
2 |
|
Пусть rang G=n, тогда матричное уравнение 2 будет иметь ненулевое решение, если T (t)B 0 на
интервале управления t0 , t f |
, это означает |
t f |
|
|
|
T (t)BBT (t)dt 0 (3), |
тогда решение u(t) BT (t) , u(t) |
||||
t0
|
|
|
|
|
– искомое |
управление, |
которое переводит |
систему из состояния x(t0 ) в |
|
константа, |
которая |
определяется |
следующим |
образом: |
|
) 0 . |
-неизвестная |
x(t f |
||
t f |
|
|
T (t)BBT (t)dt 1 ,
t0
t f |
|
|
|
1/ T (t)BBT (t)dt |
|||
t0 |
|
|
|
|
|
|
Таким образом определяется единственное решение задачи управления, |
исходя из условия управляемости системы.
Для линейной системы с одним входом матрица управляемости является квадратной матрицей размера n x n и в этом случае система будет полостью управляема, если матрица управляемости не вырождена, т.е. определитель матрицы G отличен от 0. Det G
Свойство управляемости имеет важное значение, поскольку решение задачи синтеза оптимального управления существует только если система управляема.
3
3.Наблюдаемость динамических систем. Соотношение двойственности.
При синтезе оптимальных систем управление является функцией состояния системы, а не ее выхода.
Выход - координаты системы, которые поддаются измерению, следовательно, размерность вектора y
|
|
|
|
|
|
будет меньше, чем размерность вектора x . |
|
|
|
|
|
При реализации оптимальных законов управления встает задача, как по вектору |
|
||||
y оценить |
x . Это |
||||
задача наблюдения. Условие существования ее решения – наблюдаемость системы. |
|
|
|
||
Состояние xi (t0 ) наблюдаемо в момент времени t0 , если для заданного управления |
t1 t0 , такое, |
||||
u(t) |
|||||
|
|
|
|
|
|
что знание управления на интервале t0 ,t1 и выхода y t0 ,t1 достаточно для определения |
xi (t0 ) . |
|
|||
|
|
|
|
|
|
Если каждое состояние x(t0 ) наблюдаемо при t0 |
, то говорят, что система наблюдаема в t0 . |
|
|||
|
любой момент времени t0 , то говорят, что |
|
|||
Если каждое состояние x(t0 ) наблюдаемо в |
система |
||||
(полностью) наблюдаема.
Понятия управляемости и наблюдаемости являются внутренними свойствами системы, то есть они сохраняются при всех эквивалентных преобразованиях системы.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
,t |
(1) |
|
|
|
|
|
|
|
|
|
|
|||||
x(t) |
A(t)x(t) b(t)u(t) t |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
y(t) c(t)x(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
u(t), y(t) – функции входа и наблюдаемого выхода системы. А,В,С – известные матрицы. |
||||||||||||||||||||||||||||||||
Наряду с исходной системой рассмотрим сопряженную к ней систему: |
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
(t)S (t) C |
T |
(t)v(t) |
|
|
|
(2) |
|
|
|
|
|
|
|
|
|
|
||||||||||
|
S (t) A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
Определим производную от векторов состояния исходной и сопряженной системы. |
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
d |
|
|
|
|
dS |
|
|
|
|
dx |
T |
|
|
|
T |
||||||||||||||||
|
|
|
(S (t), x(t)) |
( |
|
|
, x) |
|
(S, |
|
) |
( A (t)S (t) C |
|
(t)v(t), x(t)) (S (t), A(t)x(t) Bu(t)) |
||||||||||||||||||
|
dt |
dt |
|
dt |
|
|||||||||||||||||||||||||||
|
|
|
|
|
T |
|
|
|
(C |
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
( A (t)S (t), x(t)) |
|
(t)v(t), x(t)) |
(S (t), A(t)x(t)) (S (t), Bu(t)) |
|
|
|
||||||||||||||||||||||||||
v |
T |
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
(t)C(t)x(t) |
S |
(t)Bu(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Проинтегрируем это выражение |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
T |
|
|
|
|
T |
|
|
|
|
|
|
|
t1 |
|
T |
|
|
|
|
|
t1 |
T |
|
|
|
|
|
|
|
||
|
S |
(t1 )x(t1 ) S |
(t0 )x(t0 ) |
v |
|
(t)C(t)x(t)dt |
S |
(t)B(t)u(t)dt |
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t0 |
|
|
|
|
|
|
|
t0 |
|
|
|
|
|
|
|
|
Принимаем S(t1) 0 и учитывая (1), получим: |
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
T |
|
|
|
t1 |
T |
|
|
|
|
|
|
|
t1 T |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
S |
|
(t0 )x(t0 ) v |
|
(t) y(t)dt |
S |
(t)B(t)u(t)dt |
(3) |
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Если известно |
0 |
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
v(t) , то данное выражение можно считать операцией оценки, которое позволяет оценить |
||||||||||||||||||||||||||||||||
x(t0 ) , если известны y(t), u(t) (векторы).
Вектор S (t0 ) выбирается в зависимости от того, какая из переменных состояния оценивается.
|
|
|
|
|
|
Если нужно оценить xi (t0 ) , то i-я компонента S (t0 ) принимается = 1, остальные = 0. |
|||||
|
0 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Si |
(t0 ) 1 |
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
не плюс i, а на i-ом месте |
|
||
|
|
|
|||
Если сопряженная система управляема, то должна существовать функция входа |
|||||
v(t) под действием |
|||||
которой данная система переходит из исходного состояния Si (t0 ) в 0 за время t1 t0 .
4
|
(t) - функция входа, которая решает данную задачу, тогда состояние xi (t0 ) определяется из |
|||||
Пусть vi |
||||||
соотношения (3). |
|
|
|
|||
|
t1 |
T |
|
t1 T |
|
|
xi (t) v |
|
(t) y(t)dt S |
(t)B(t)u(t)dt |
(4) |
||
|
t0 |
|
|
t0 |
|
|
Следовательно, анализ наблюдаемости динамических систем свелся к задаче управляемости сопряженной системы.
Данная взаимосвязь между управляемостью и наблюдаемостью линейных динамических систем называется соотношением двойственности.
Соотношение двойственности указывает на то, что исходная система (1) наблюдаема, если сопряженная к ней система (2) управляема.
Управляемость сопряженной системы имеет место, если выполняется следующее условие:
t1
det ФT (t,t0 )CT (t)C(t)Ф(t,t0 )dt 0
t0
t1 t0
5
4.Оценка вектора состояния линейной динамической системы. Наблюдатель Люенбергера.
Решение задачи ОУ приводит к закону управления, который является функцией переменных состояния, следовательно, при решении этих задач полагается, что вектор состояния полностью известен, однако в реальных системах это условие как правило не выполняется.
Чаще всего приходится сталкиваться с ситуацией, когда измерению поддаются сигналы, образующие вектор измерения y(t), составляющие которого являются известными функциями состояния системы. Устройство, восстанавливающее вектор состояния по измеряемым координатам называется наблюдателем.
|
|
|
|
|
|
|
|
|
|
dxˆ |
|
|
|
|
|
|
|
|
Система n-го порядка: |
|
|
|
F (t)xˆ(t) |
G(t) y(t) H (t)u(t) (1) xˆ - вектор оценки |
|
||||||||||||
|
dt |
|
||||||||||||||||
Состояния |
системы |
|
является |
наблюдателем |
полного |
порядка для системы вида |
(2) |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
dx(t) |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
A(t)x(t) |
b(t)u(t) |
(2) |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|||||||||||
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y(t) c(t)x(t) |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
При xˆ(t |
|
|
|
|
|
|
|
|
|
|
|
|
t t0 |
|||||
|
) |
|
|
|
|
|
|
|
|
|
||||||||
) x(t |
имеем xˆ(t) x(t) (совпадение вектора оценки и состояния) для всех u (t ) ; |
|||||||||||||||||
|
|
|
|
0 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
Будем рассматривать наблюдатель, у которого F, G и H определяются следующим образом: |
|
|||||||||||||||||
F (t) A(t) kH (t)c(t) |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
(3) kH - матрица коэффициентов усиления наблюдателя (n x m). |
|
||||||||
G(t) kH (t) |
|
|
|
|
||||||||||||||
|
|
|
B(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|||
H (t) |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Подставим |
(3) |
в |
(1): |
|
dxˆ |
|
|
|
(4) |
|||||||||
|
|
[ A(t) k H (t)c(t)]xˆ |
(t) k H (t) y(t) B(t)u(t) |
|||||||||||||||
|
dt |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dxˆ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A(t)xˆ(t) B(t)u(t) kH (t)[ y(t) yˆ(t)] |
(5) |
|
|
||||||||||||
|
dt |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
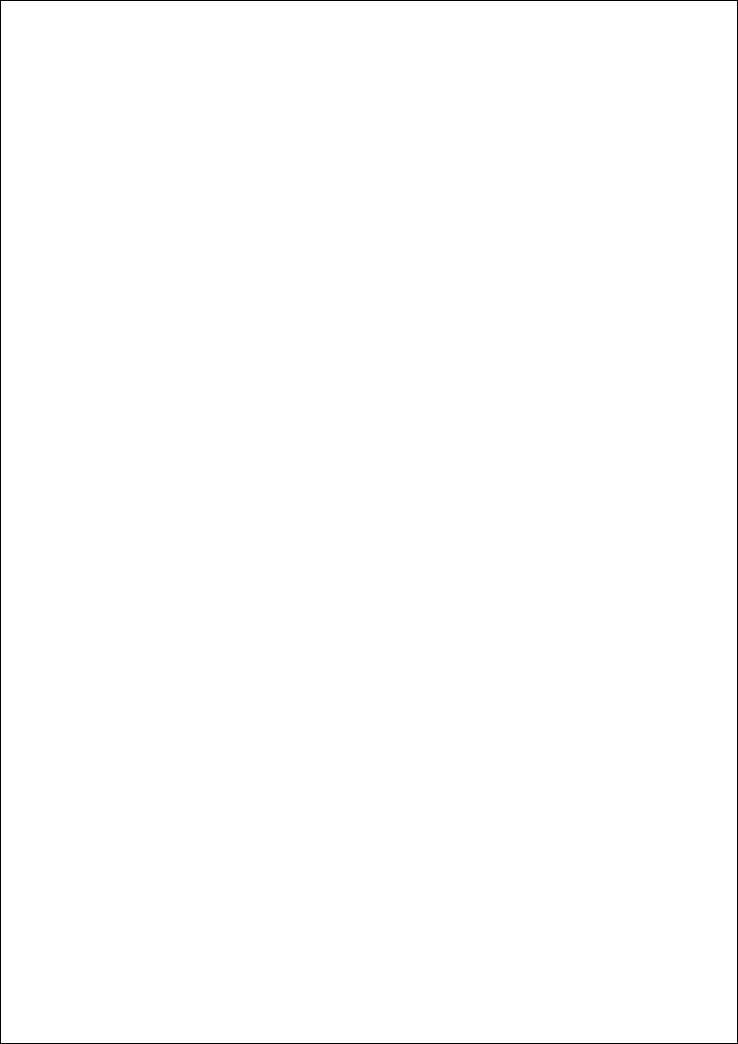
yˆ(t) c(t)xˆ(t) оценка вектора наблюд.
Структурная схема наблюдателя: |
|
|
|
|
y(t) |
|||||
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
+ |
||
|
|
|
|
KH(t) |
|
|
||||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
(–) |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
y(t) |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|||
u(t) |
B(t) |
|
|
|
|
xˆ |
(t) |
|
|
ˆ |
|
|
|
|
|
|
|||||
|
+ |
|
|
|
C(t) |
|
|
|||
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
A(t)
Наблюдательэто устройство, позволяющее по управлению и измеряемым координатам оценить вектор состояния системы.
Докажем, что система вида (5) есть система для оценки вектора состояния.
Пусть S(t)- решения сопряженного уравнения, удовлетворяющего краевым условиям, при которых
T |
|
|
|
|
t1 |
T |
|
t1 |
T |
|
соотношение S |
(t |
0 )x(t0 ) v |
|
(t) y(t)dt S |
(t)B(t)u(t)dt является операцией |
|||||
|
|
|
|
|
t0 |
|
|
t0 |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
оценки. ( S (t1 ) 0; S (t0 ) Si |
1 |
|
i ) |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
Из теории решения 2-х точеных задач известно, что v(t) является функцией состояния сопряженной системы.
6
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
v(t) kH |
|
(t)S(t) |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
T |
(t) C |
T |
|
T |
|
|
|
|
T |
|
(6) |
|||
S(t) ( A |
|
(t)kH |
(t))S(t) или S(t) ( A(t) kH |
(t)C(t)) S(t) |
|||||||||||||
Система (6) является сопряженной для системы (4) |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
(t)) (S (t), dxˆ(t) ) |
|
|
|
|||||
|
d (S (t), xˆ(t)) ( dS (t) , xˆ |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
dt |
|
dt |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
(( A kH C)T S (t), xˆ(t)) |
(S (t), (( A kH C) xˆ |
(t)) Bu (t) kH |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
(S (t), ( A kH C) xˆ(t)) (S (t), ( A kH C) xˆ |
(t)) (S (t), Bu (t)) |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
(S (t), Bu (t)) |
(S (t), kH y(t)) |
|
|
|
|
||||||||||||
y(t))
(S (t), kH y(t))
|
|
|
|
|
|
|
|
|
t1 |
|
|
|
t1 |
|
|
|
проинтегрируем S (t1 )xˆ |
(t1 ) S (t0 )xˆ(t0 ) |
(S (t), B(t)u(t)dt) |
|
(S (t), kH y(t))dt |
|
|||||||||||
|
|
|
|
|
|
|
|
t0 |
|
|
|
t0 |
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|||||||
(S(t), kH y(t))dt (kH |
S(t), y(t)) |
(v(t), y(t)) |
|
|
|
|
|
|
||||||||
T |
|
t1 T |
|
|
|
|
t1 |
T |
|
|
|
|
|
|
|
|
S |
(t0 )xˆ(t0 ) (S |
(t), B(t)u(t)dt) v |
(t) y(t)dt |
то есть вектор оценки совпадает с вектором состояния в |
||||||||||||
|
|
t0 |
|
|
|
|
t0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
момент t0 |
xˆ(t0 ) x(t0 ) |
|
|
|
|
|
|
|
|
|
|
|
|
|||
Следовательно, система вида (4, 5) есть система для оценки состояния. |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Введем в рассмотрение вектор оценки x(t) x(t) xˆ(t) (вектор ошибки оценки) |
|
|||||||||||||||
Ошибка оценки удовлетворяет следующему диф.уравнению: |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d x(t) |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
[ A(t) |
kH (t)c(t)] x(t) |
(7) |
|
|||
|
|
|
|
|
|
|
|
dt |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
( A kH C )(t t0 ) |
|
|
|
||
Решение этого уравнения имеет вид: x(t) e |
(8) |
|
||||||||||||||
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Если вектор оценки совпадает с вектором состояния в момент t0 , то вектор ошибки x(t) 0 для t t0 . |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xˆ(t0 ) , поэтому матрицу kH (t) |
|
В реальных системах из-за действия возмущений и шумов x(t0 ) |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
выбирают таким образом, чтобы ошибка наблюдения 0 при t . lim x(t) 0 |
т.е. система вида (7) |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
должна быть асимптотически устойчивой.
Для системы с постоянными параметрами асимптотическая устойчивость наблюдателя определяется собственными значениями матрицы A kH c . Назовем их полюсами наблюдателя. Для устойчивости
наблюдателя необходимо и достаточно, чтобы полюса наблюдателя находились в левой полуплоскости. Наблюдатель рассматриваемого вида для системы с постоянными параметрами называется наблюдателем Люенбергера.
Для быстрой сходимости ошибки к 0 необходимо выбрать kH таким образом, чтобы полюса
наблюдателя были удалены как можно больше влево от мнимой оси корневой плоскости. Решение уравнений (7) помимо вида (8) может быть представлено следующим образом:
|
|
|
|
|
|
P, P |
1 |
|
|
x(t) Pe (t t0 ) P |
1 x(t0 ) |
- матрицы правого и левого собственных векторов. |
|||||||
|
|
|
1 |
(t t0 ) |
|
|
|
|
|
e (t t0 ) |
|
e |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
1... n - отрицательные полюса наблюдателя. |
|||
|
|
|
|
|
|
|
|||
|
|
|
|
0 |
|
e |
n (t t0 ) |
||
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
||
Чем больше по модулю будут полюса наблюдателя, тем ближе к нулевой будет матрица e (t t0 ) и
меньше . Однако значительное удаление от мнимой оси влево в большинстве случаев может быть
x(t)
достигнуто путем выбора больших значений коэффициентов матрицы усиления, что, в свою очередь, делает наблюдатель весьма чувствительным к шумам измерения. Задача определения матрицы
7
коэффициентов усиления kH , обеспечивающей наилучшие характеристики процесса восстановления в условиях действия шумов называется задачей оптимальной фильтрации.
8
5.Теорема Куна-Таккера, следствие из нее.
Теорема Куна-Таккера. Пусть |
|
g |
|
|
|
|
* - точка |
|
H (u) и |
(u) дифференцируемы по u |
в области U и u |
|
|||||
|
|
i |
|
|
|
|
|
|
|
|
0. |
Тогда существуют такие неотрицательные числа i |
|
||||
максимума для H (u) , при ограничении |
gi (u) |
|||||||
0, что выполняется следующее равенство:
|
|
r |
|
|
* ) 0 |
|
|||||
u H (u |
* ) i u gi (u |
||||
i 1
Причем |
=0 для всех i для которых |
g |
|
* ) 0 .( |
(u |
||||
i |
|
i |
|
|
то есть для неэффективных ограничений.) Причем i >0 для всех i
|
|
для которых g |
|
|
|
|
|
|
|
|
|
|
||
|
|
(u* ) 0 .( то есть для эффективных ограничений.) |
||||||||||||
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
Доказательство: |
|
|
|
|
|
|
|
|
|
|||
|
|
|
* |
точки максимума для |
|
|
|
|
|
|
|
|||
|
|
Пусть u |
H (u) . |
|
|
|
|
|
|
|||||
|
|
Надо рассмотреть два случая: |
* |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
— внутренняя точка. Тогда |
||||||
|
|
1. Случай внутренней точки. Пусть u |
||||||||||||
|
|
положим все i |
= 0, т.к. ограничения будут |
|
|
|
|
|
||||||
|
|
неэфективны. |
|
производная ф-ии в точке экстремума |
||||||||||
|
|
|
|
|
|
|
|
|
|
* |
опорную |
|
||
|
|
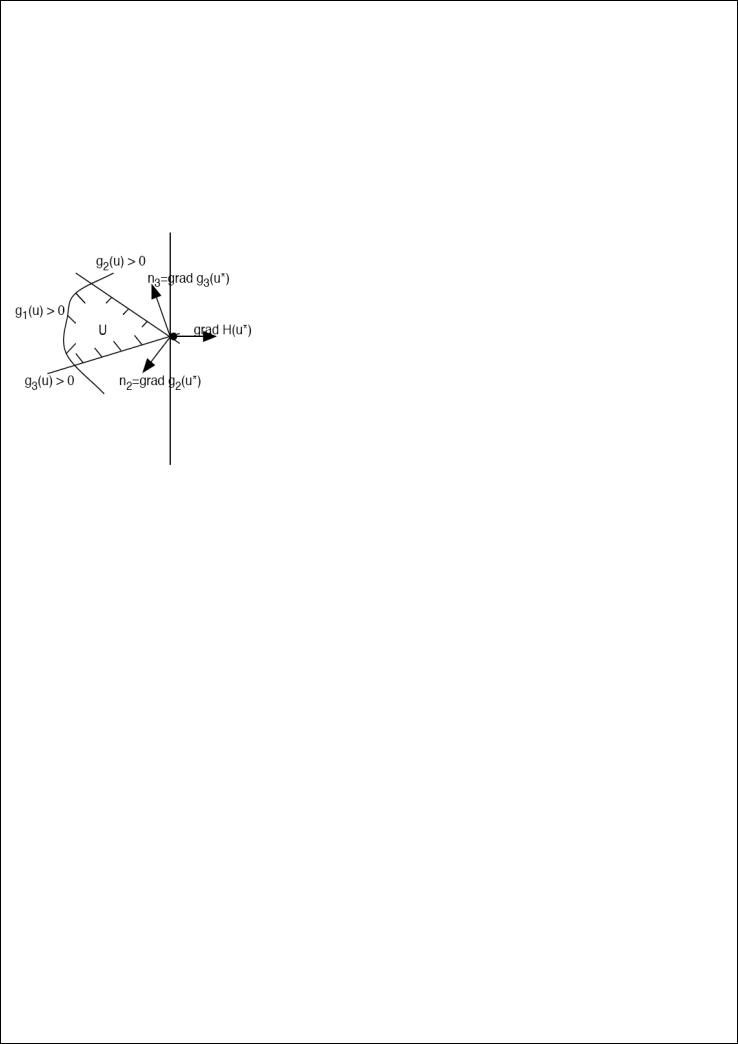
2. и* — граничная точка. Проведем через точку u |
|
|
||||||||||
|
|
гиперплоскость Г, и направим все нормали по градиенту функции. |
||||||||||||
|
|
Можно записать следующее соотношение: |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u H (u) |
2 g2 (u) 3 |
g3 (u) u H (u) 2 g2 (u) 3 |
g3 (u) 0 |
|||||||||
1 = 0, так как ограничение g1 неэффективно (то есть данная точка этому ограничению не |
|
|
||||||||||||
принадлежит). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Следствие 1. Если |
|
|
|
* — точка, где |
достигает своего |
|||||||||
H (u) |
дифференцируема по u в области U, а u |
H (u) |
||||||||||||
максимума, то для всех направлений, допустимых в этой точке выполняется следующее неравенство
|
|
|
|
0 . |
|
|
|
|
T H (u)d |
* |
|
|
|
|
|||
|
u |
u |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
0 |
||
1. |
|
* |
- внутренняя точка, то |
|
u |
H (u* ) |
||
Если u |
|
|
|
|
||||
2. |
|
* |
— граничная точка, то выполняется условие теоремы Куна-Таккера. |
|||||
Если u |
|
|||||||
Следствие 2. Если функции H вогнута относительно управления, то необходимое условие оптимальности оказывается и достаточным. Найденное в этом случае управление оказывается оптимальным в глобальном смысле, т.к. экстремум такой функции — максимум, причём единственный.
9
6.Теорема о числе переключений.
Если
1.Задана система обыкновенных дифференциальных уравнений вида
2.Матрице А имеет все вещественные собственные значения
3.На управление наложены следующие ограничения вида u j u j max , j=1,..,m
то число переключений функции оптимального по быстродействию управления не превышает n-1, где n
– порядок исходной системы.
Доказательство: Запишем закон движения объекта в следующем виде
x(t)
|
m |
|
|
|
|
Ax(t) b j u j |
(t) |
|
j 1
Оптимальное управление Куна-Таккера определяется следующим образом:
u*j (t) u j max * sign( T (t)b j )
В этом выражении функция ψ(t) может быть определена из следующего диф.уравнения
(t)
H ( , x, u, t)
dx
H –функция Гамильтона
H T (t) Ax(t)
m
T b j u j (t)
j 1
|
H |
|
|
|
|
|
Т.е. нам нужно найти производную по х: |
|
|
|
( T Ax) AT |
||
|
dx |
|
dx |
|
|
|
Решение имеет вид  — начальное значение в момент времени t0 = 0. Один из
— начальное значение в момент времени t0 = 0. Один из
способов задания  — нормаль к опорной гиперплоскости в точке х(t0) Перепишем выражение для оптимального управления с учётом ψ(t):
— нормаль к опорной гиперплоскости в точке х(t0) Перепишем выражение для оптимального управления с учётом ψ(t):
* |
(t) u j max |
* sign(e |
AT t |
,bj |
) u j max |
|
, e |
At |
,bj |
) |
u j |
0 |
* sign( 0 |
|
Представим eAt в виде спектрального разложения eAt = ρeλtρ−1, где р, ρ−1 — матрицы правых и левых собственных векторов.
Если воспользуемся матричным свойством C = AB => С −1 = B−1A−1, получим
* |
|
|
|
|
|
|
Значит, оптимальное управление u j |
|
будет определятся как |
|
|
||
|
|
|
|
|
n |
|
|
, e t 1bj |
|
u j max |
* sign( i e it ) |
||
u*j (t) u j max * sign( |
0 |
) |
||||
i 1
j — некоторые коэффициенты, которые опредляются матрицами ρ и ρ−1 и векторами bj и ψ0 и не зависят от времени. Тогда моменты переключения управления — это моменты, когда выражения под
n
знаком sign’ма равно 0. Число переключений определяется корнями этого выражения: i e it =0.
i 1
Рассмотрим случай, когда n = 2. При суммировании экспонент будет либо одно пересечение c осью времени, либо не будет ни одного. По индукции можно доказать, что сумма n экспонент будет иметь не более (n − 1) пересечений с осью времени.
Замечание. Данная теорема верна только в случае действительных корней матрицы A. При комплексных корнях появится функция sin, и следовательно, пересечений будет бесконечно много.
Таким образом, мы нашли оптимальное управление как функцию ψ(t)
10