

Уравнения динамики и статики объектов управления.
Различные по физической природе объекты управления могут описываться однотипными математическими зависимостями. Построение любой системы управления начинается с изучения объекта управления и составления его математического описания, которое может быть получено экспериментальным, аналитическим или комбинированным путем.
{В первом случае уравнения объекта получают путем постановки специальных экспериментов на объекте (метод активного эксперимента) либо статистической обработкой результатов длительной регистрации координат объекта в условиях его нормальной эксплуатации (метод пассивного эксперимента).
При аналитическом описании уравнения объекта получают на основании физико-химических закономерностей протекающих в нем процессов.
Комбинированный путь получения математического описания объектов подразумевает обычно составление уравнений аналитическим путем с последующим уточнением коэффициентов этих уравнений экспериментальным методом.}
Уравнения объектов автоматического регулирования в зависимости от описываемого ими режима работы подразделяютсяна уравнения статики и динамики.
Уравнения динамикиописывают неустановившийся или переходный режим в объекте. Выходная координата объекта при этом является функцией времени и в общем виде уравнение динамики будет дифференциальным уравнением, содержащим производные по времени.
Объекты управления называются линейными, если они подчиняются принципу суперпозиции, который заключается в том, что реакция объекта на сумму входных сигналов равна сумме реакций на каждый из сигналов в отдельности. Линейные объекты описываются линейными дифференциальными уравнениями, то есть уравнениями, в которых искомая функция и ее производные содержатся в первой степени.
Уравнение динамики (представляет из себя ОДУ):
an*(dnx(t)/dtn)+…+ a1*(dx(t)/dt)+ a0*x(t)= b0*g(t)+…+ bm*(dmg(t)/dtm).
Начальные условия: x(0),…,x(n-1)(0).
![]()
![]() – условие физической реализуемости.
– условие физической реализуемости.
Уравнения статикиописывают установившийся режим, при котором все координаты объекта остаются неизменными во времени, то есть объект находится в состоянии равновесия. Они представляют собой алгебраические или дифференциальные уравнения, содержащие производные по какому-либо параметру, кроме времени. Существенной особенностью уравнений статики является неизменность координат объекта во времени.g(t)=const=g0,x(t)=const=x0.
Если g(t)=const=g0, то x(t)=const=x0. Тогда уравнение динамики преобразуется в уравнение статики:
a0*x0=b0*g0.
2. Передаточные функции объектов и устройств управления.
Классический подход предполагает переход от временной области в область изображений.
Преобразование Лапласа.
L[x(t)]=X(S) – линейный оператор.t– время,S– переменная ЛапласаS=σ+jω.
X(S)= ∫x(t)e-stdt(интеграл берётся от 0 до ∞).
x(t)=L-1[X(S)]=1/2πj*![]()
Задача Коши.
Линеаризация возможна при малых возмущениях.
L[x1(t)]=S*X(S)-X(0+)
…
L[xn(t)]=Sn*X(S)-Sn-1*X(0+)- …-Xn-1(0+)
Теорема свертки: ![]()
Применим преобразование Лапласа к ОДУ, описывающее ЛДС:
anSnX(S)+an-1Sn-1X(S)+…+a1SX(S)+a0X(S)–Mн.у.(S)=
=bmSmG(S)+bm-1Sm-1G(S)+…+ b1SG(S)+ b0G(S)
Начальные условия (nштук):x(0+),..,x(n-1)(0+)
Положим начальные условия нулевыми.
X(S)[anSn+…+a0]=G(S)[bmSm+..+b0]+Mн.у.(S)

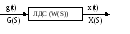
X(S) =G(S)W(S)
W(S)=X(S)/G(S) – передаточная функция ЛДС – это отношение изображений выходного сигнала к входному при нулевых начальных условиях.
![]()
D(p) совпадает сD(S)
M(p) совпадает сM(S)
![]()
Передаточная функция может быть детализирована по 2-м направлениям:
1.типовые звенья
2.представление в виде нулей и полюсов

![]()
![]()
g(t)
Основные характеристики типовых звеньев во временной и частотной областях.

3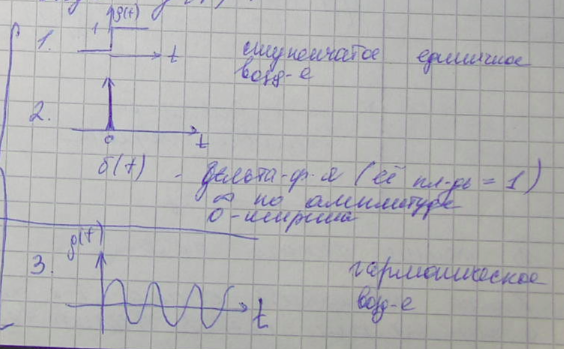 типа входных воздействий:
типа входных воздействий:
- ступенчатое;
- импульсное;
- гармоническое.
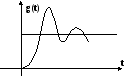
Переходная функция.
Реакция системы на ступенчатое входное воздействие называется переходной функцией (h(t)).
![]()
![]()
![]() (преобразование Лапласа)
(преобразование Лапласа)
![]() -
единичное ступенчатое воздействие
-
единичное ступенчатое воздействие
Весовая функция ЛДС.
Реакция системы на импульсное входное воздействие называется весовой функцией.
g(t) = 1*(t-0)
![]()
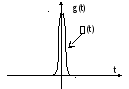
амплитуда бесконечна.
L[(t)] = 1
G(s) = 1
![]()
w(t) – весовая функция ЛДС (импульсная переходная функция).

![]() – реакция имп. системы при нулевых
начальных условиях.
– реакция имп. системы при нулевых
начальных условиях.
Реакция на гармоническое воздействие
На вход подается гармоническое воздействие: g(t)=g0sinωt,ω=const
![]()
Амплитудно-фазовая характеристика.
На вход подается гармоническое воздействие: g(t)=g0sinωt,ω=const
![]()
0 < +
P() – вещественная ЧХ,Q() – мнимая ЧХ.
Амплитудно-фазовая ЧХ:
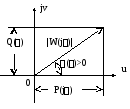
Типичный случай АФЧХ:

![]() ;
;
![]()
Логарифмические частотные характеристики типовых звеньев, минимально-фазовые и неминимально-фазовые типовые звенья.
![]() логарифмическая
амплитудно-частотная хар-ка, дБ(децибел)
логарифмическая
амплитудно-частотная хар-ка, дБ(децибел)
![]()
![]() i
– полюсы 1,..n
i
– полюсы 1,..n
![]() -нули
1,..m
m<=n
-нули
1,..m
m<=n
Наиболее часто
встречающиеся звенья со множителем,
типовые звенья:
![]()
Типовые звенья делятся на минимально-фазовые(поведения амплитуды и фазы строго согласовано, есть закономерность) и неминимально-фазовые(несвязанны между собой, нет между ними закономерности).
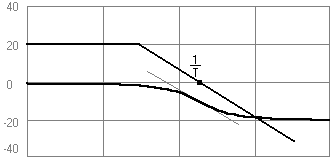
Во всех графиках перегибы в точке 1/Т !
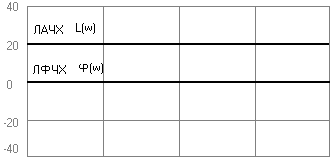
I. Минимально-фазовые звенья: (график: L(w) по вертикали и w,c-1 по горизонтали)
1) Усилительное звено
W(s)=k k>0,коэффициент передачи. Высота линии на рисунке 20lgk
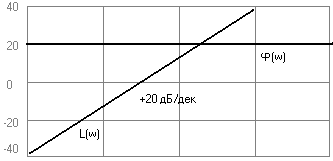
2) Интегрирующее
звено {![]() }
}
![]()
 Наклон
-20дБ/декада
Наклон
-20дБ/декада
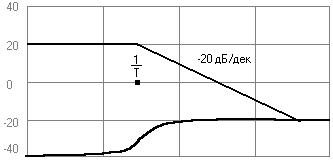
3) Апериодическое звено
![]()
 погрешность
3дБ
погрешность
3дБ
4) Колебательное звено
![]()
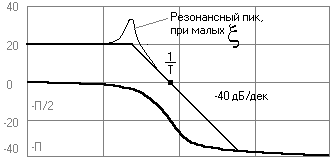
Если 0,4≤ζ≤0,7 погрешность =+/-3дБ при ζ=1 колебательное звено исчезает и появляется 2 апериодических
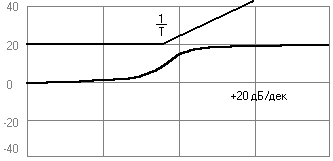
5) Дифференцирующее звено 1-го порядка
![]()
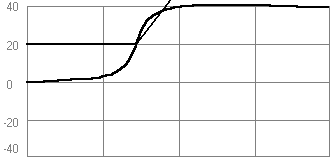
6) Дифференцирующее звено 2-го порядка
![]()
{7) Звено «чистого» дифференцирования (дифференцирующее звено)
W(s)=ks}
{Свойство минимально-фазовых звеньев +-n->+-(pi/2)*n}
II. Неминимально-фазовые звенья:
1) Неустойчивое апериодическое звено
![]()
2) Неустойчивое колебательное звено
![]() (присутствует как
минимум один минус)
(присутствует как
минимум один минус)
Дифференцирующее звено 1-го порядка
W(s)=k(1-τs)
4) Дифференцирующее звено 2-го порядка
![]()
5) Звено «чистого» запаздывания
W(S)=e-τs
