

Беляев Ю.Н. Введение в векторный анализ
.pdfŸ 4. |
Разложение вектора на составляющие |
|
41 |
|||||||||||
|
~ |
есть линейная комбинация двух неколлинеарных век- |
||||||||||||
вектор f |
|
|||||||||||||
|
|
|
~ |
~ |
|
|
|
~ |
|
|
|
|
|
|
торов ~g и h: f = f1~g + f2h: |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
~ |
|
|
|
|
|
|
|
|
|
|
|
~g |
|
h |
|
|
f1~g |
|
|
|
|
|
|
|
|
|
|
|
|
|
~ |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
~ |
|
|
~g |
f |
|
|
|
|
|
|
|
|
|
|
f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
~ |
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
f2h |
|
|
Ðèñ. 26 |
|
|
|
|
|
|
|
|
|
h |
|||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
a) |
|
|
|
|
b) |
|
Для нахождения координат |
f1 è |
|
~ |
|
||||||||||
f2 вектора f в базисе ~g |
||||||||||||||
~ |
(ñì. ðèñ. 26a) |
нужно |
параллельным |
переносом |
векто- |
|||||||||
è h |
||||||||||||||
|
~ |
|
~ |
|
|
|
|
|
|
|
|
|
|
|
ров f , ~g, h совместить их начала и построить параллелограмм, |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
~ |
~ |
стороны которого параллельны векторам ~g и h, а вектор f яв- |
||||||||||||||
ляется диагональю этого параллелограмма (см. рис. 26b). Такое |
||||||||||||||
разложение единственно. Доказательство последнего утвержде- |
||||||||||||||
ния проводится подобно тому, как это было сделано ранее для |
||||||||||||||
пространственного случая. |
|
|
|
|
|
|||||||||
|
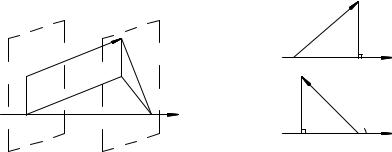
П р и м е р 17. Найдем коорди- |
|
|
|
||||||||||
наты векторов |
~ |
~ |
|
|
|
|
|
|
|
|||||
F5 |
è F10 из задачи 6 |
|
~ |
|
||||||||||
в базисе |
|
~ |
~ |
из той же задачи (см. |
|
|
||||||||
F1; F6 |
|
F10 |
|
|||||||||||
ðèñ. 11). |
|
|
|
|
|
|
|
|
|
|
~ |
|
~ |
|
|
По построению (рис. 27) |
|
|
|
F1 |
|||||||||
|
|
|
F6 |
|
|
|||||||||
~ |
1 ~ |
~ |
|
~ |
|
~ |
~ |
: |
|
1 |
~ |
|||
F5 |
= 2 F1 |
+ F6 |
; F10 |
= F1 |
F6 |
|
2 F~1 |
|||||||
Следовательно, |
координатами век- |
|
F6 |
|||||||||||
|
~ |
|
|
|
|
|
~ |
~ |
|
|
|
|
|
~ |
|
|
в базисе |
являются |
|
|
F5 |
||||||||
òîðà F5 |
|
F1; F6 |
|
|
|
|||||||||
числа |
1 |
|
|
|
|
|
~ |
|
|
|
Ðèñ. 27 |
|
||
2 и 1; а вектора |
F10 ñî- |
|
|
|||||||||||
ответственно 1 и 1. |
|
|
|
|
|
|
|
|||||||
Расмотрим теперь случай, когда базис состоит лишь из одного вектора. Такая ситуация реализуется для множества векторов, параллельных некоторой прямой; базисом может быть любой ненулевой вектор из этого множества.
Подытоживая сказанное о векторных базисах, еще раз отметим, что: 1) любые три некомпланарных вектора образуют базис в тр¼хмерном пространстве; 2) любые два неколлинеарных вектора образуют базис на плоскости, в которой они лежат; 3) один (ненулевой) вектор является базисом для множества векторов ему параллельных. Согласно определению, минимальное
42 |
Глава 1. ОСНОВНЫЕ СВЕДЕНИЯ ИЗ АЛГЕБРЫ |
число линейно независимых векторов, с помощью которых любой другой вектор данного множества может быть однозначно представлен в виде линейной комбинации, называется размерностью данного векторного множества. Соответственно, множество векторов в первом случае есть трехмерное векторное пространство, во втором двумерное, а множество векторов, параллельных одной прямой одномерное векторное пространство.
Задачи
20. Известны разложения двух векторов p~ и q~ по трем
~ ~ ~
некомпланарным векторам b1; b2; b3:
~ |
~ |
~ |
~ |
~ |
~ |
: |
p~ = p1b1 |
+ p2b2 |
+ p3b3 |
; q~ = q1b1 |
+ q2b2 |
+ q3b3 |
Какая зависимость должна существовать между коэффициентами этих разложений, если 1) p~ = ~q; 2) p~ и ~q коллинеарны?
21. |
×òî |
можно сказать |
о взаимном расположении век- |
|
торов |
~ |
~ |
åñëè îíè |
связаны линейной зависимостью |
~a; b; |
~c; d, |
|||
~ |
~ |
~ |
|
|
~a + b + ~c + d = 0? Рассмотреть следующие варианты:
1)=6 0; =6 0; =6 0; =6 0;
2)= 0; =6 0; =6 0; =6 0;
3)= 0; = 0; =6 0; =6 0;
4)= 0; = 0; = 0; =6 0:
22. Разложить вектор |
~ |
~ |
|
~c по тр¼м некомпланарным |
|||
D = b 1 |
|||||||
~ |
~ |
~ |
|
~ |
|
~ |
~ |
векторам: A = ~a b + ~c; B = b + |
2~c; C = ~a + b: |
||||||
|
|
|
~ |
|
~ |
|
|
23. Разложить вектор A = ~a+b+~c по трем некомпланарным |
|||||||
~ |
~ |
|
~ |
|
~ |
~ |
~ |
векторам: B = ~a + b 2~c; C = ~a b и D = 2b + 3~c: |
|||||||
|
|
|
|
|
|
|
~ |
24. Дано разложение вектора ~c = ~a + b по двум неколли- |
|||||||
~ |
|
неарным векторам ~a и b. В каком случае коэффициенты разло- |
|
жения и (или) равны нулю? |
|
~ |
~ ~ |
25. Найти координаты вектора Fi |
в базисе Fj ; Fk . Âñå òðè |
вектора берутся из задачи 6 (см. рис. 11). Значения номеров i,
~ ~ ~
j, k векторов Fi, Fj ; è Fk выбираются из Таблицы согласно двузначному номеру варианта mn, первая цифра которого m
~
определяет номер вектора Fi, а вторая цифра n номера j и

Ÿ 5. Проекции вектора |
|
|
|
|
|
|
|
|
|
43 |
||||||||
k векторов |
~ |
|
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Fj |
è Fk . Например, в варианте 00 требуется найти |
|||||||||||||||||
|
|
|
|
|
|
~ |
|
|
|
~ |
~ |
|
|
|
|
|
||
координаты вектора F5 |
в базисе F1; F6. |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
Т а б л и ц а к задаче 25 |
|
|
|
|
||||||||
|
m |
|
0 |
1 |
|
2 |
|
3 |
4 |
5 |
|
6 |
|
7 |
8 |
9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
5 |
|
6 |
|
7 |
|
8 |
9 |
1 |
|
2 |
|
3 |
10 |
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
n |
|
0 |
|
1 |
|
2 |
|
3 |
4 |
5 |
|
6 |
|
7 |
8 |
9 |
|
|
j |
|
1 |
|
2 |
|
3 |
|
4 |
5 |
4 |
|
10 |
|
6 |
7 |
9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
6 |
|
5 |
|
4 |
|
2 |
1 |
7 |
|
8 |
|
9 |
3 |
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ÿ5. Проекции вектора
5.1.Проекция вектора на плоскость. Пусть даны вектор ~a и плоскость p (см. рис. 28). Опустим из начала A и конца B вектора ~a перпендикуляры AAp è BBp на плоскость
p. Основания перпендикуляров Ap è Bp являются проекциями |
|||||
|
|
|
! |
(направленный от Ap |
|
точек A и B на плоскость p. Вектор ApBp |
|||||
ê Bp) называется проекцией вектора ~a на плоскость p. |
|
||||
|
|
|
N |
~a2 |
|
~a |
B |
~a1 |
|
K |
|
~s |
|
||||
A |
|
M |
|
|
|
|
|
|
|
||
|
p |
|
n |
|
p |
Ap |
Bp |
m |
|
|
k |
|
|
|
|
||
Ðèñ. 28 |
|
|
Ðèñ. 29 |
|
|
Возьмем два вектора ~a1 è ~a2 и плоскость p (рис. 29). Построим сумму ~s данных векторов и спроектирум их и их сумму
~s на плоскость p. Для этого из точек M , N , K опускаем перпен-
! !
дикуляры M m, N n, Kk на плоскость p. Векторы mn, nk суть
!
проекции данных векторов на плоскость p, а вектор mk есть
проекция их суммы ~s на ту же плоскость. Из рисунка 29 вид-
! ! !
но, что mk = mn + nk. Этот результат нетрудно обобщить на произвольное число N складываемых векторов, а именно: про-
екция суммы векторов на некоторую плоскость p равна сумме проекций складываемых векторов на эту же плоскость
X |
p |
X |
|
|
N |
~ai! |
= N |
~aip : |
(1.51) |
i=1 |
|
i=1 |
|
|
44 |
Глава 1. ОСНОВНЫЕ СВЕДЕНИЯ ИЗ АЛГЕБРЫ |
5.2. |
Проекция вектора на ось. Осью называется пря- |
мая линия, которой приписано определенное направление (задаваемое, например, единичным вектором).
Проведем через начало A и конец B вектора ~a (рис. 30) плоскости pA è pB перпендикулярно оси `. Обозначим точки пересечения этих плоскостей с осью ` через A` è B`. Это будут основания перпендикуляров, опущенных из начала и конца вектора ~a на ось `.
Проекцией вектора ~a на ось `, задаваемую вектором единич- ной длины ~el, называется длина отрезка A`B`, взятая со знаком
(+), если направление этого отрезка совпадает с направлением оси `, и со знаком ( ) в противоположном случае. Это опре-
деление можно записать следующим образом: |
|
||||
|
> |
|
d |
|
|
|
< |
A`B`; åñëè (~a; ~e`) < =2; |
|
||
a` = |
8 |
|
A`B`; åñëè (~a; ~e`) > =2; |
(1.52) |
|
|
: |
0; |
d |
d |
|
|
> |
åñëè (~a; ~e`) |
|
||
|
|
|
|
= =2; |
|
ãäå a` обозначает проекцию вектора ~a на ось `.
Заметим, что в отличие от проекции вектора на плоскость, являющейся вектором, проекция вектора на ось является вели- чиной скалярной.
|
pA |
|
|
|
a) |
~a |
|
|
|
|
B |
|
|
~a; ~e |
) |
|
|
A |
|
~a |
pB |
|
0 |
)( d` |
a` |
~e` |
|
|
a |
B0 |
~e` |
b) |
~a |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
d` |
|
A` |
|
|
B` |
|
|
|
_(~a; ~e`) |
|
|
|
|
|
|
|
a` |
0 |
~e |
Рис. 30 Рис. 31 Рассмотрим более подробно случай, когда угол между век-
тором и осью острый (рис. 30). Из точки A` проведем прямую, параллельную вектору ~a до пересечения с плоскостью pB â òî÷- êå B0. Четырехугольник ABB0A` по построению будет паралле-
0 |
6 |
0 |
A |
B |
~a; ~e |
): Соединим |
|
|
|
|
B |
||||
лограммом. Поэтому A`B = a; è |
|
|
|
` |
|
` = ( d` |
|

Ÿ 5. Проекции вектора |
45 |
отрезком прямой точки B0 è B`: Отрезок B0B` лежит в плоскости pB ; поэтому он перпендикулярен оси `: Следовательно, треугольник A`B0B` прямоугольный, и в нем гипотенуза A`B0 равна длине a вектора ~a, а проекция A`B` = a` есть длина катета, прилежащего к углу 6 B0A`B`:
Проекцию свободного вектора на ось можно сделать более наглядной. Выберем на оси ` начало отсчета точку 0. Будем приписывать точкам оси, лежащим от т. 0 в направлении оси `, положительные значения, а точкам оси, лежащим по другую сторону от 0, отрицательные значения. Параллельным переносом совместим начало вектора ~a с т. 0 и опустим перпендикуляр из конца вектора ~a на ось `: Выбирая плоскость, проходящую через векторы ~a и ~e`; за плоскость чертежа, мы
d
получаем рис. 31a, когда угол (~a; ~e`) между вектором ~a и осью
`острый, и рис. 31b когда (~a; ~e`) > 90 :
5.3.Свойства проекции вектора на ось. Любую ось можно рассматривать в качестве координатной оси прямоугольной системы координат. В этом смысле проекция вектора на ось есть частный случай координаты вектора. Поэтому проекции векторов на оси, согласно формулам (1.47), (1.49), (1.50), обладают свойствами:
1) если два вектора равны, то равны и их проекции на любую ось
~ |
(1.53) |
~a = b ) a` = b`; |
2) проекция суммы векторов на любую ось равна алгебраиче- ской сумме проекций этих векторов на ту же ось, то есть
N |
N |
|
X |
X |
|
åñëè ~s = ~ai; òî s` = |
ai`; |
(1.54) |
i=1 |
i=1 |
|
3) при умножении вектора ~a на любое число его проекция на произвольную ось ` умножается на число , а именно:
åñëè ~a = ~c; òî c` = a`: |
(1.55) |
46 |
Глава 1. ОСНОВНЫЕ СВЕДЕНИЯ ИЗ АЛГЕБРЫ |
Ÿ6. Приложение к тригонометрии
6.1.Проекции единичного вектора. Понятие проекции вектора на ось тесно связано c синусом и косинусом угла. Напомним их определения.
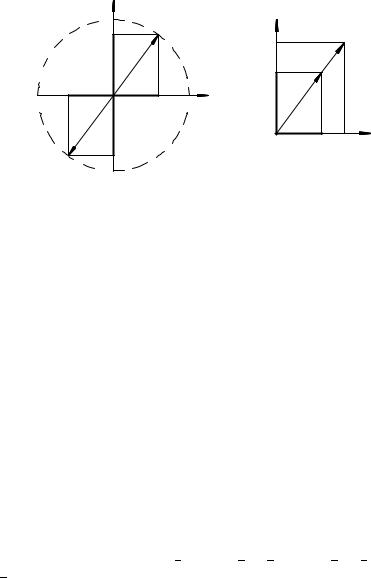
Возьмем на плоскости (рис. 32) две взаимно перпендикулярные оси x и y: Из точки их пересечения, взятой за нуль отсчета, проведем вектор единичной длины ~ea: Обозначим угол между ~ea и осью x буквой ' (положительный угол отсчитывается против хода часовой стрелки от оси x). Возможные положения конца вектора ~ea образуют круг единичного радиуса.
Проекция единичного вектора на ось y называется синусом угла ' и обозначается sin '; а проекция на ось x косинусом угла ': cos ':
Ясно, что при любом значении угла ' функции sin ' и cos ' не превосходят по модулю единицу: j sin 'j 1; j cos 'j 1:
При 0 ' < =2 и 3 =2 < ' 2 проекция вектора на ось x положительна (cos ' > 0). Если =2 < ' < 3 =2, то проекция вектора на ось x отрицательна.
6.2. Тригонометрическая форма записи проекции.
Используя определения синуса и косинуса, можно представить проекции вектора ~a произвольной длины a на оси x и y в виде
ax = a cos '; ay = a sin ':
Покажем это для случая 0 < ' < =2, когда тригонометри- ческие функции sin ' и cos ' можно рассматривать как отношения катета (противолежащего углу и прилежащего к углу соответственно) прямоугольного треугольника к гипотенузе (см. рис. 33). Действительно, из подобия треугольников OA0A0x èOAAx следует:
|
OAx0 |
= |
OAx |
; |
èëè |
cos ' = |
|
ax |
; |
||
|
OA0 |
OA |
|
a |
|||||||
|
|
|
|
|
|
|
|
||||
A0Ax0 |
= |
AAx |
|
; |
èëè |
sin ' = |
ay |
|
: |
||
|
OA0 |
OA |
|
|
a |
||||||
|
|
|
|
|
|
|
|
||||
Ÿ 5. |
Проекции вектора |
|
|
|
|
47 |
||
|
Таким образом проекцию вектора на ось `, определяемую |
|||||||
формулой (1.52), можно записать в более компактной форме: |
||||||||
|
|
|
|
~a; ~e |
): |
|
|
(1.56) |
|
|
|
y |
a` = a cos( d` |
|
|
|
|
|
|
1 |
|
|
|
y |
|
|
|
|
sin ' |
~ea |
|
ay |
|
~a |
A |
|
|
|
|
|
|
|||
|
|
|
)' |
x |
|
~ea |
A0 |
|
|
|
cos('+ ) |
sin ' |
|
|
|||
|
-1 |
0 |
cos ' |
1 |
|
|
|
|
|
|
|
|
|
||||
|
|
-~ea |
sin('+ ) |
|
)' |
Ax0 Ax |
||
|
|
|
|
|
0 |
cos ' |
ax x |
|
|
|
|
|
|
|
|||
|
|
-1 |
|
|
|
Ðèñ. 33 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Ðèñ. 32 |
|
|
|
|
|
|
|
Сумма квадратов проекций вектора на взаимно перпенди- |
|||||||
кулярные оси, согласно теореме Пифагора, равна квадрату мо- |
||||||||
дуля вектора. Отcюда следует |
|
|
|
|
||||
6.3.Основное тригонометрическое тождество
sin2 ' + cos2 ' = 1: |
(1.57) |
6.4. Формулы приведения. Если изменить направление вектора на противоположное, то его проекция на ось изменит знак. Соответствующие построения для вектора единич- ной длины ~ea приведены на рис. 32. Очевидно,
sin(' + 180 ) = sin '; cos(' + 180 ) = cos ': (1.58)
Отметим здесь еще два соотношения между синусом и косинусом:
sin(' 90 ) = cos '; cos(' 90 ) = sin ': |
(1.59) |
6.5. Теорема синусов. Рассмотрим ABC (рис. 34). Обозначим углы при вершинах ABC теми же буквами, что и сами вершины, а именно: 6 CAB 6 A; 6 ABC 6 B; 6 BCA
6 C:

48 |
Глава 1. ОСНОВНЫЕ СВЕДЕНИЯ ИЗ АЛГЕБРЫ |
||||||
|
|
|
|
~ |
|
|
|
Спроектируем векторное равенство ~c = b+~a на направление |
|||||||
! |
~ |
6 |
|
6 |
|
||
DB; перпендикулярное b: Получим c cos |
|
|
ABD = a cos |
|
|
DBC: |
|
Перепишем это равенство, используя формулу (1.59), в виде
c sin A = a sin C: |
|
|
|
|
|
|
|
Аналогично доказываются равенства: b sin A |
= a sin B è |
||||||
c sin B = b sin C: |
|
|
|
|
|
|
|
Эти три равенства обычно записывают в виде единой фор- |
|||||||
ìóëû |
sin A |
|
sin B |
|
sin C |
|
|
|
= |
= |
; |
(1.60) |
|||
|
a |
b |
|
||||
|
|
|
c |
|
|||
которая называется теоремой синусов.
A4
|
B |
|
|
|
|
~a4 |
~c |
|
~a |
|
|
|
)4' |
|
~ |
|
|
~s4 |
|
A3 |
|
b |
|
|
|
~s3 |
|
A |
D |
C |
Ðèñ. 35 |
|
~a3 |
|
|
|
|||||
|
Ðèñ. 34 |
|
|
|
~s2 |
)3' |
|
|
|
|
|
A2 |
|
|
|
|
|
|
~a2 |
|
|
|
|
., |
|
|
|
|
|
|
|
)2' |
|
A0 ~s1 = ~a1 A1
П р и м е р 18. Рассмотрим сумму ~sn компланарных век-
торов ~a1, ~a2; : : : ; ~an, таких, что каждый |
èç |
векторов ~aj+1 |
(j = 1; : : : ; n 1) повернут относительно ~aj |
íà |
îäèí è òîò æå |
угол 2', и длины складываемых векторов одинаковы: a = a1 =
a2 = : : : = an. |
|
|
|
|
1. Покажем, что |
sin n' |
|
|
|
sn = a |
: |
(1.61) |
||
|
||||
sin ' |
Будем обозначать окончания складываемых векторов ~aj (j = 1; : : : ; n) буквами Aj соответственно, а начало первого A0. Для наглядности на рис.35 показаны первые четыре складываемые векторы и суммы ~s1, ~s2, ~s3 è ~s4, когда ' < =4.
Нетрудно заметить, что получающиеся в результате построения многоугольники A0A1 : : : Aj , основаниями которых являются векторы ~sj , симметричны относительно прямой, проходя-

Ÿ 5. Проекции вектора |
49 |
щей через середину соответствующего основания sj перпендикулярно последнему. Следовательно, угол между векторами ~a1 è ~sj равен углу между векторами ~aj è ~sj :
d |
d |
|
) |
(~a1; ~sj ) = (~aj ; ~sj ): |
( |
||
d
По условию (~aj 1;~aj ) = 2'. Поэтому внутренние углы многоугольника A0A1 : : : Aj при вершинах A1; A2; : : : ; Aj 1 равны по (180 2') и для суммы внутренних углов этого многоугольника, используя формулу ( ), можно записать равенство
|
|
1)(180 |
|
d |
|
1)180 : |
(j |
|
|
2') + 2(~aj ; ~sj ) = (j |
|
Отсюда находим
d
(~aj ; ~sj ) = (j 1)':
Используя формулы ( ) и ( ), получаем
j d |
d |
|
d |
|
|
|
|
|
|
(~s ; ~sj 1) = (~sj ;~a1) |
|
(~sj 1;~a1) = (j |
|
1)' |
|
(j |
|
2)' = '; |
|
( )
любые два последовательных суммарных вектора ~sj è ~sj 1 повернуты один относительно другого на один и тот же угол '.
 A0Aj Aj 1 углы при вершинах A0, Aj è Aj 1 равны соответственно ', (j 1)' и (180 j'): По теореме синусов применительно к A0Aj 1Aj имеем
sin ' |
= |
sin(j 1)' |
= |
sin j' |
; |
|
|
||||
a |
|
sj 1 |
sj |
||
откуда и следует формула (1.61).
2. Найдем проекцию суммы векторов ~a1 + ~a2 + + ~an = ~sn на ось, составляющую угол с вектором ~a1. Воспользуемся определением проекции вектора на ось (1.56), свойством (1.54), формулами (1.61) и ( ). В результате получим
cos + cos( |
+ 2') + + |
sin n' |
|
|
+ cos [ |
+ 2'(n 1)] = |
cos [ + (n 1)']: (1.62) |
||
|
||||
sin ' |

50 |
Глава 1. ОСНОВНЫЕ СВЕДЕНИЯ ИЗ АЛГЕБРЫ |
||||||
Из формулы (1.62) следуют равенства: |
|
|
|
|
|||
|
|
|
|
sin n' |
cos n'; |
(1.63) |
|
cos ' + cos 3' + + cos [(2n 1)'] = |
sin ' |
||||||
1 + cos 2' + + cos [2(n 1)'] = |
sin n' |
cos(n 1)'; (1.64) |
|||||
sin ' |
|||||||
|
|
sin n' |
|
|
|
|
|
sin + + sin [ + 2'(n 1)]= sin ' sin [ +(n 1)'];(1.65) |
|||||||
|
|
|
|
|
sin2 n' |
(1.66) |
|
sin ' + sin 3' + + sin [(2n 1)'] = sin ' ; |
|||||||
|
|
sin n' |
sin(n 1)'; |
(1.67) |
|||
sin 2' + + sin [2(n 1)'] = sin ' |
|||||||
cos |
+ cos h |
+ 2n i + + cos h |
+ |
2(n 1) |
i = 0; |
(1.68) |
|
|
n |
||||||
|
+ sin h |
2 |
|
2(n 1) |
i = 0: |
|
|
sin |
+ n i + + sin h |
+ |
|
n |
(1.69) |
||
Формулы (1.63)-(1.67) получаются из (1.62) в результате подстановок: = ', = 0, = =2; = ' =2; = =2: А соотношения (1.68) и (1.69) отражают свойство замкнутого многоугольника, когда ' = =n и, следовательно, sn = 0.
Задачи
26.Используя определение проекции вектора на ось, найти значения sin ' и cos ' для следующих значений угла ' : 0 ; 30 ;
45 ; 60 ; 90 ; 120 ; 135 ; 150 ; 180 :
27.Используя результаты, полученные в примере 18, доказать формулы для суммы и разности тригонометрических функций:
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
|
sin + sin = |
2 sin |
|
+ |
|
cos |
|
|
|
|
; |
|
(1.70) |
|||||||
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
||||
sin |
|
sin = |
2 cos |
|
|
+ |
|
sin |
|
|
|
|
; |
|
(1.71) |
||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
||||
cos + cos = |
2 cos |
|
|
+ |
|
cos |
|
|
|
|
; |
|
(1.72) |
||||||
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
|
|||||
cos |
|
cos = |
|
2 sin |
|
|
+ |
sin |
|
|
|
|
: |
(1.73) |
|||||
|
|
|
|
|
|
|
|
|
|||||||||||
Ÿ7. Вектор в ортонормированном базисе
7.1.Координаты вектора в ортонормированном базисе. Если в качестве базиса трехмерного пространства