


1 Методы исследования динамической нагруженности вагонов
Общие методы динамики вагона базируются на принципах аналитической механики. Методологической основой аналитической механики являются вариационные принципы, которые применительно к движению механической1системы могут быть сформулированы следующим образом: если действительное движение системы описывается координатамиx(t), то работа сил, действующих на систему при вариации этих координат δx, должна равняться нулю.
Снижение динамической нагруженности вагонов во время эксплуатации является одним из основных резервов повышения экономичности железнодорожных перевозок, позволяющих реализовать более высокие скорости движения поездов и улучшить условия сохранности на основе глубоких научных исследований сложных динамических процессов, возникающих при эксплуатации подвижного состава.
Силы, действующие на вагон при загрузке, разгрузке и во время движения, могут достигать значительной величины, что вызывает интенсивные колебания его узлов. Закономерности этих колебаний во многом определяются структурой и свойствами вагона как динамической системы: величинами колеблющихся масс, моментов инерции, высотой центра тяжести, типом тележек и рессорного подвешивания, жесткостью элементов кузова, подвижностью и другими свойствами перевозимого груза.
Опыт эксплуатации показывает, что значительная часть деталей вагонов повреждается из-за напряжений, которые возникают при колебаниях, возбуждаемых различными переменными или внезапно приложенными силами, действующими самостоятельно или в сочетании с другими факторами (статические нагрузки, температурные напряжения и др.). Циклическое приложение нагрузок, превышающих предел выносливости металла детали, приводит к появлению в ней усталостных трещин.
Многие детали вагонов имеют подвижные соединения или скрепляются болтами. Взаимное смещение деталей под действием динамических сил вызывает износ сопряжений, который проявляется в изменении качества их поверхности, геометрических размеров и формы. На рабочих поверхностях появляются риски и царапины, цилиндрическая форма изменяется на овальную, увеличивается конусность, а иногда возникает и погнутость.
Изменяются также свойства поверхностных слоев деталей. У одних деталей поверхностная твердость уменьшается из-за износа цементированных или цианированных слоев, у других – увеличивается вследствие появления наклепа. Однако при чрезмерном наклепе растет хрупкость и ускоряется разрушение поверхности.
Изменение геометрических размеров, формы и зазоров в соединениях деталей вызывает увеличение вибраций как следствие интенсивный износ или излом деталей.
Болтовые соединения деталей, которые работают с предварительной затяжкой, также очень чувствительны к динамическим нагрузкам. В процессе эксплуатации происходит уменьшение сил трения, которые препятствуют взаимному перемещению деталей данного соединения. Возникают ударные нагрузки, а сами крепежные детали начинают работать на срез, что может вызвать разрушение соединения и отказ узла.
Чувствительностью к вибрациям обладают многие грузы. Некоторые сыпучие грузы при перевозке уплотняются, из-за чего усиливается нагруженность элементов кузова, а также значительно затрудняется выгрузка грузов. Другие виды сыпучих грузов под действием колебаний приобретают повышенную подвижность и высыпаются через неплотности кузовов. Жидкие грузы при колебаниях не только оказывают существенное влияние на прочность резервуаров, но и часто теряют свои качества.
При проектировании и эксплуатации пассажирских вагонов и отдельных типов грузовых необходимо учитывать физиологический критерий плавности хода.
Перечисленные факторы и изменяющиеся условия эксплуатации подвижного состава чрезвычайно усложняют проблему разработки мер по уменьшению динамических воздействий на вагоны и перевозимые грузы. Тем не менее уже достаточно хорошо изучены многие действующие на вагон силы. В общем случае интенсивность, характер, место и частота приложения этих сил являются случайными величинами.
Однако, выделяя существенное и общее, можно классифицировать такие силы и определить с заданной вероятностью пределы их измерения.
При классификации все силы объединяют в два класса: действующие на все узлы вагона и преимущественно только на кузов (рисунок 1).
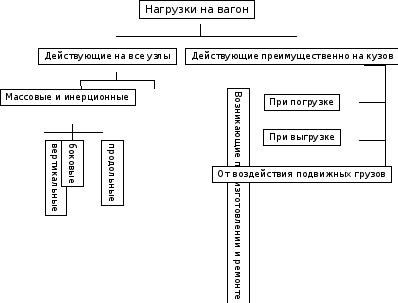
Рисунок 1 – Классификация, действующих на вагон нагрузок
Кроме того, их можно разделить по направлению основного действия (вертикальные, боковые и продольные), а также по причинам возникновения (при погрузке или выгрузке грузов, при движении вагона, во время ремонта и постройки). По характеру действия различают силы статические, квазистатические и динамические.
На рисунке 1.1 показаны силы, действующие на движущийся в поезде вагон с неподвижным грузом.
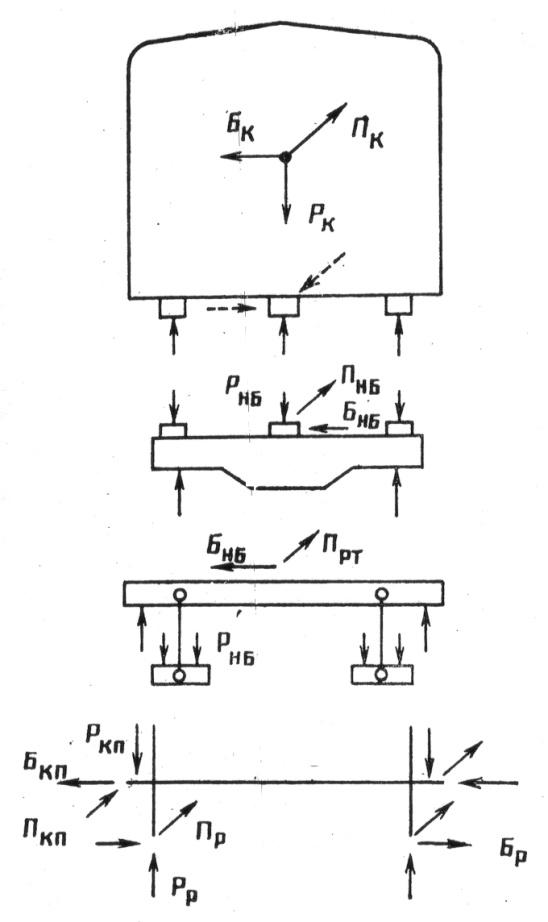
Рисунок 1.1 – Схема сил, действующих на вагон с неподвижным грузом при движении в поезде: Рi, Бi, Пi – вертикальные, боковые и продольные силы, действующие соответственно на кузов, надрессорную балку, раму тележки, колесную пару, рельсы
Вагон условно расчленен на блоки (кузов, надрессорная балка, рама тележки, колесная пара) с указанием сил взаимодействия. При расчетах распределенные силы часто заменяются сосредоточенными, а динамические – квазистатическими с учетом коэффициентов динамики. В общем случае коэффициенты динамики различны для разных узлов вагонов и даже для разных мест одной и той же детали. Можно считать, что большинство динамических нагрузок несимметрично воздействуют на кузов вагона и вызывают его пространственные колебания.
При перевозках подвижных грузов на кузов передаются дополнительные нагрузки (рисунок 1.2). К таким грузам можно отнести большинство жидких и сыпучих грузов, которые при колебаниях смещаются.
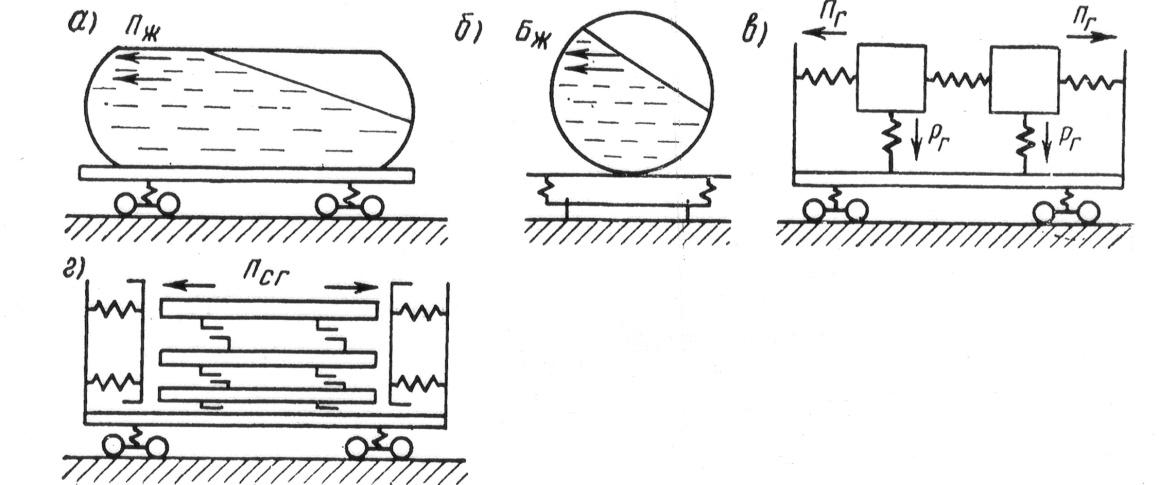
Рисунок 1.2 – Силы, действующие при перевозке подвижных вагонов: а ,б – жидкие грузы; в, г – твердые грузы; Пж, Бж – продольная и боковая нагрузки от колебаний жидкого груза;
Рг, Пг, Псг – вертикальные и продольные нагрузки от колебаний и сдвига твердых грузов
При перевозках различной техники, машин, некоторых типов труб и других материалов также возникают дополнительные динамические воздействия на несущие конструкции кузова вагона (рисунок 1.3, а, б, г). Величину сил взаимодействия подвижных грузов и кузова определяют на основании сложных расчетов динамики вагонов, представляя груз в виде некоторого маятника или более сложной динамической системы.

Рисунок 1.3 – Силы, действующие на кузов вагона при погрузке и выгрузке грузов
Значительные динамические силы передаются на вагон в процессе его загрузки и разгрузки.
Схема действия сил, показанная на рисунке 1.3, а, характерна для погрузки большой номенклатуры тарных грузов (контейнеры, разнообразная техника). В расчетах эти грузы моделируются сосредоточенными нагрузками, которые распределены некоторым образом по несущим элементам кузова. Более общий случай отражает рисунок 1.3, б, характерный для перевозки труб, круглого лесоматериала и других подобных материалов. Здесь помимо вертикальных сил действуют значительные распорные силы.
Величина ударных нагрузок особенно велика при экскаваторной или бункерной погрузке кусковых грузов (рисунок 1.3, в).
Механизированная выгрузка грузов должна рассматриваться как основной способ разгрузки вагонов. В зависимости от типа кузова, вида груза и применяемых при его выгрузке механизмов на вагон могут действовать разнообразные силы (рисунок 1.3, д-з).
Наиболее распространенными механизмами для массовой выгрузки из полувагонов сыпучих грузов являются вагоноопрокидыватели (рисунок 1.3, д). При закреплении вагона на вагоноопрокидывателе на верхнюю обвязку кузова действуют дополнительная вертикальная сила, а при повороте происходит мощное динамическое воздействие на всю боковую стену.
Схемы рисунка 1.3, е и ж отражают применение для ускорения выгрузки различных вибраторов и рыхлителей сыпучих грузов. Следует отметить, что в проблеме воздействия вибромашин на прочность узлов вагона еще много неясных вопросов, для решения которых необходимы дальнейшие комплексные теоретические и экспериментальные исследования.
Для выгрузки сыпучих грузов часто используют грейферы и другие механизмы, в том числе ударного действия, создающие дополнительные динамические напряжения в элементах кузова вагона (рисунок 1.3, з).
При движении вагона с эксплуатационными неисправностями даже по идеально гладкому пути будут возникать сложные колебания, увеличивающие сопротивление движению поезда.
Рассмотрим методы получения уравнений движения динамики твердых тел.
Метод ДʹАламбера
Уравнение ДʹАламбера – Лагранжа в декартовых координатах (принцип ДʹАламбера). Рассмотрим движение абсолютно твердого тела в пространстве, заданном декартовыми координатами. Положение тела в любой момент времени определяется шестью координатами (тремя линейными x, y, z тремя угловыми θ, φ, ψ). Если тело соединено с неподвижными (или подвижными) точками пространства упругими или упроговязкими элементами 1-4 и на него действуют внешние силы Pn (рисунок 1.4).
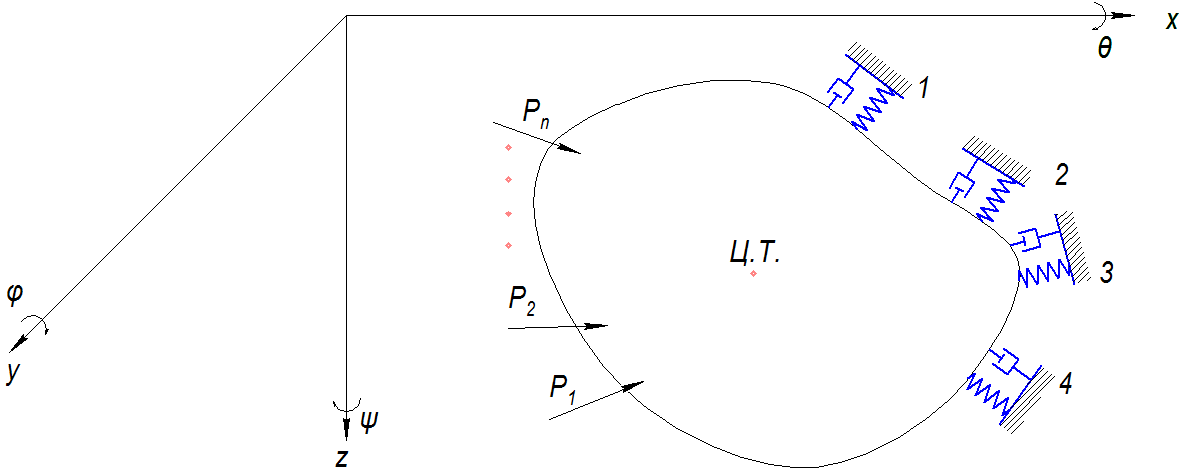
Рисунок 1.4 – Расчетная схема и система координат для описания движения твердого тела
Вариационный принцип механики для движения его в направлении любой из шести координат, например для движения вдоль координаты х, запишется следующим образом (принцип ДʹАламбера):
 ,
(1)
,
(1)
где
 –
масса тела;
–
масса тела;
 –ускорение
тела вдоль оси х;
–ускорение
тела вдоль оси х;
 –проекция
внешней силы с номером i
на
ось х;
–проекция
внешней силы с номером i
на
ось х;
 –проекция
реакции упруговязкого элемента с номером
j
на ось x;
–проекция
реакции упруговязкого элемента с номером
j
на ось x;
n – количество внешних сил, приложенных к телу;
k – количество упругих или упруговязких элементов, присоединенных к телу.
Уравнение (1) представляет собой дифференциальные уравнения равновесия тела при движении его в пространстве, заданном шестью координатами. Внешние силы P =P(t) являются функциями времени t, а реакции R – функциями времени, координат и их производных, т.е.:
R = R (t, x, y, z, θ, φ, ψ, xʹ, yʹ, zʹ, θʹ, φʹ, ψʹ). (2)
Эти
уравнения записаны для любого малого
промежутка времени, в течении которого
можно предположить, что силы инерции,
внешние силы
 и реакции
и реакции являются постоянными величинами. Чтобы
определить траекторию движения тела в
заданном пространстве под действием
внешних сил, необходимо найти интеграл
системы уравнений, которые при заданных
начальных условиях обращали бы систему
дифференциальных уравнений в тождество.
являются постоянными величинами. Чтобы
определить траекторию движения тела в
заданном пространстве под действием
внешних сил, необходимо найти интеграл
системы уравнений, которые при заданных
начальных условиях обращали бы систему
дифференциальных уравнений в тождество.
Метод ДʹАламбера – Лагранжа.
Уравнения ДʹАламбера – Лагранжа в обобщенных координатах (Уравнения Лагранжа второго рода). Вариационный принцип для движения тела в обобщенных координатах запишется следующим образом:
 ,
(3)
,
(3)
где Т – кинетическая энергия движущегося тела, или конечного числа тел в заданной системе обобщенных координат qi;
qi, qʹi – обобщенные координаты и обобщенные скорости;
δqi – вариация i-й обобщенной координаты;
Qi – обобщенная сила, действующая при вариации координаты qi;
r – количество обобщенных координат.
Обобщенные координаты qi могут иметь размерность как линейного, так и углового перемещения. Они выбираются так, что при вариации одной из них остальные сохраняют постоянное значение.
В силу независимости вариаций из выражения (2) получаем уравнение Лагранжа второго рода.
 ,
(4)
,
(4)
где i = 1, 2, 3,… r – количество обобщенных координат.
Кинетическая энергия (для простейшего случая) примет вид:
 .
(5)
.
(5)
В выражении (5) первый член дает кинетическую энергию поступательного движения, а второй – вращательного. В данном случае l – количество линейных координат, (r – l) – угловых, а r – общее количество координат (рисунок 1.5).
Если на тело или систему действуют внешние силы и наложены неудерживающие связи, которые могут быть упругими или упругодессипативными, то значения Qi в уравнении (4) являются внешними силами реакциями связей, действующими при вариации обобщенных координат qi и обобщенных скоростей qʹi.
 ,
(6)
,
(6)
где П – потенциальная энергия системы;
Ф – функция рассеивания, равная мощности, развиваемой силами неупругого сопротивления.
Подставив уравнение (6) в уравнение (4), получим уравнение Лагранжа второго рода в наиболее часто употребляемом виде:
 .
(9)
.
(9)
Таким образом, дифференциальные уравнения (1) и (7) являются основными уравнениями аналитической механики. Они получены на основе одного и того же принципа, заключающегося в том, что работа внешних, внутренних и инерционных сил, действующих на движущееся тело при вариации координат его траектории, должна равняется нулю.
Уравнения ДʹАламбера – Лагранжа являются дифференциальными уравнениями, связывающими ускорения, скорости и перемещения тела в заданной системе координат. Они выражают условия динамического равновесия тела (или системы тел) для малого промежутка времени. Чтобы определить траекторию тела для большого промежутка времени, необходимо найти интеграл этих дифференциальных уравнений.
Для анализа и решения дифференциальных уравнений в простых случаях используют аналитические методы, в более сложных – методы, основанные на применении аналоговых (представляют собой набор электронных блоков , каждое из которых может производить заданные операции над электрическими сигналами поступающими в эти устройства) и цифровых вычислительных машин Для решения задач динамики применяют в задачах динамики для вычисления собственных значений и собственных векторов матриц дифференциальных уравнений высокого порядка, Написать что автоматизирован такие комплексные программные пакеты как «Универсальный механизм», «ADAMS»), а также численные методы интегрирования (метод Ругне-Кутта, разностные методы, метод сеток, итерационные методы Эйлера-Коши, метод Милна, метод Адамса и др.)
Исследование динамики вагона выполнено в программе «UM». В курсовом проекте предусмотрено моделирование динамики полувагона с использованием ПК «Универсальный механизм».