

Теория автоматического управления
.pdf61
yсв3(t) = A3  =
=  A3 = >
A3 = > 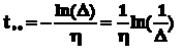 .
.
В общем случае, когда передаточная функция замкнутой САУ имеет нули, то использование данного метода может дать большую ошибку. Однако всегда качество управления будет тем лучше, чем больше h и меньше m, поэтому данный метод имеет смысл для любых САУ, но приближенно.
Зная значения h, x, m можно оценить область, за которую кривая переходного процесса выходить не будет (рис.90). Для этого строятся две кривые: u(t,h) - миноранта и v(t,h) - мажоранта, ограничивающая кривую переходного процесса соответственно снизу и сверху так, что u(t,h)  e(t)
e(t)  v(t,h), где e(t) = yo-y(t). Формулы для определения миноранты и мажоранты берутся в справочниках для конкретных случаев.
v(t,h), где e(t) = yo-y(t). Формулы для определения миноранты и мажоранты берутся в справочниках для конкретных случаев.
12.2. Интегральные критерии качества
Интегральные критерии позволяют судить о качестве управления путем вычисления интегралов от некоторых функций управляемой величины. Эта функция выбирается таким путем, чтобы значение определенного интеграла от этой функции по времени от 0 до + 

 было однозначно связано с качеством переходного процесса. В то же время данный интеграл должен сравнительно просто вычисляться через коэффициенты уравнений исследуемой системы.
было однозначно связано с качеством переходного процесса. В то же время данный интеграл должен сравнительно просто вычисляться через коэффициенты уравнений исследуемой системы.
Например, если переходная характеристика является монотонной, то можно утверждать, что качество переходного процесса тем лучше, чем меньше площадь, ограниченная данной кривой и установившимся значением управляемой величины (рис.91). Она равна площади, ограниченной кривой изменения свободной составляющей управляемой величины и осью абсцисс.
62
Если система устойчива, то свободная составляющая управляемой величины в
пределе стремится к нулю , поэтому площадь ограниченная данной кривой имеет конечное значение и определяется по формуле:
, поэтому площадь ограниченная данной кривой имеет конечное значение и определяется по формуле:
Joo =  .
.
Величина Joo представляет собой линейную оценку качества управления.
Чем она меньше, тем выше быстродействие системы. При выборе параметров системы стремятся обеспечить минимум Joo. Если имеется какой то варьируемы параметр A, то можно построить кривую Joo = f(A) (рис.92). Ее минимум, определяемый из условия dJoo/dA = 0, даст оптимальное значение A.
Пусть дано уравнение динамики замкнутой САУ:
(a0pn + a1pn-1 + a2pn-2 + ... + an)y = (b0pm + b1pm-1 + ... + bm)u.
Свободный процесс описывается однородным дифференциальным уравнением:
(a0pn + a1pn-1 + ... + an)yсв = 0,
следовательно:
yсв = 
yсв = 
Joo = |
св(t)dt = |
. |
Пусть при t = 0 САУ имела следующие начальные условия:
yсв(0) = y0,  = y0’, ...,
= y0’, ..., = y0(n-1).
= y0(n-1).
Кроме того
63
yсв(

 ) = 0,
) = 0, (
(

 ) = 0,...,
) = 0,..., (
(

 ) = 0,
) = 0,
так как процесс затухает и при t 


 свободная составляющая и все производные становятся равны нулю. Подставляя эти значение, получаем:
свободная составляющая и все производные становятся равны нулю. Подставляя эти значение, получаем:
Joo = (a0y0(n-1) + a1y0(n-1) + ... + an-1y0)/(an.
То есть линейную оценку качества регулирования можно легко вычислить, зная начальные условия и коэффициенты дифференциального уравнения. Возможны и другие линейные оценки качества, но они используются реже, например:
J01 =  св(t) t dt;
св(t) t dt;
J0n =  св(t) tndt.
св(t) tndt.
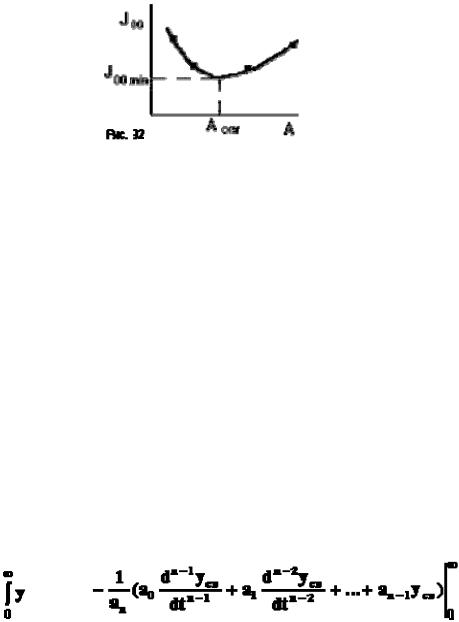
Линейные оценки качества неприменимы при колебательном процессе. Так как площади, ограниченные кривой yсв(t) и осью абсцисс складываются с учетом знака, то минимальному значению Joo может соответствовать процесс с большим числом колебаний и малым быстродействием (рис.93). В этом случае более эффективны квадратичные оценки качества, например,
J20 =  yсв2(t)dt.
yсв2(t)dt.
Значение этого интеграла соответствует площади под кривой yсв2(t) и осью абсцисс, которая всегда положительна (рис.94).
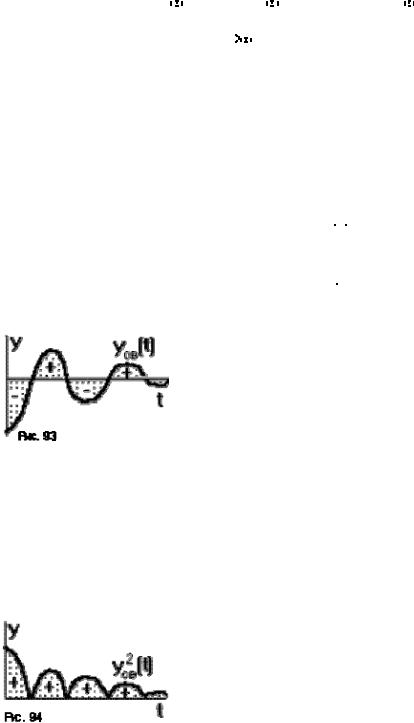
Выбирая параметры САУ по минимуму J20 мы приближаем кривую yсв(t) к осям координат, что приводит к уменьшению времени регулирования (рис.95). Вывод формулы для вычисления этой оценки сложен, поэтому ограничимся замечанием, что значение вычисляется через коэффициенты дифференциального уравнения a0...an,b0...bm. При вычислении слагаемых в этой формуле используются определители Гурвица, так что даже расчет по ней сопряжен с определенными трудностями и требует использования ЭВМ или специальных таблиц.
64
При выборе параметров САУ по минимуму J20 часто получают нежелательную колебательность процесса, так как приближение yсв(t) к оси ординат вызывает резкое увеличение начальной скорости, что в свою очередь может вызвать большое перерегулирование, уменьшив при этом запас устойчивости. Для того, чтобы обеспечить плавность протекания процесса, в квадратичную оценку качества добавляется слагаемое, зависящее от скорости изменения регулируемого параметра yсв’(t). Получаем критерий качества
J21 =  св2(t) + t2 (yсв’(t))2]dt,
св2(t) + t2 (yсв’(t))2]dt,
где  - некоторая наперед заданная постоянная времени, определяющая весовое соотношение между оценкой по yсв и по yсв’. При малых значениях
- некоторая наперед заданная постоянная времени, определяющая весовое соотношение между оценкой по yсв и по yсв’. При малых значениях  уменьшение колебательности будет незначительным. Завышение
уменьшение колебательности будет незначительным. Завышение  увеличит время переходного процесса так, что ее выбор определяется конкретными условиями.
увеличит время переходного процесса так, что ее выбор определяется конкретными условиями.
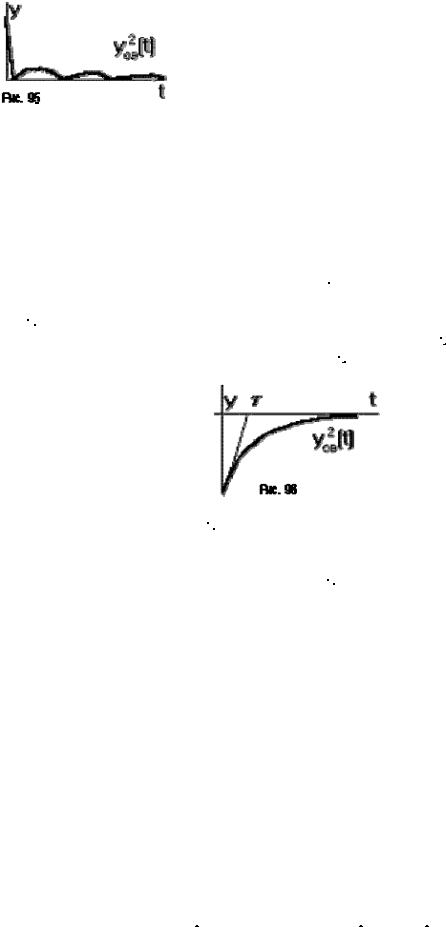
Этот интеграл имеет наименьшее значение, если переходный процесс соответствует экспоненте с постоянной времени  (рис.96). Другими словами, по соображениям качества управления следует стремиться к тому, чтобы переходная характеристика замкнутой САУ как можно меньше отличалась от характеристики инерционного звена первого порядка, имеющего наперед заданную постоянную времени
(рис.96). Другими словами, по соображениям качества управления следует стремиться к тому, чтобы переходная характеристика замкнутой САУ как можно меньше отличалась от характеристики инерционного звена первого порядка, имеющего наперед заданную постоянную времени  , значение которой определяются техническими условиями.
, значение которой определяются техническими условиями.
Задача выбора параметров САУ по минимуму J20 и J21 решается аналитически только в случае невысокого порядка дифференциального уравнения. Иначе используют ЭВМ.
Лекция 13. Частотные методы оценки качества
13.1. Теоретическое обоснование
Частотные методы основаны на привычном для инженеров графическом изображении динамических характеристик, которые можно снять экспериментально, поэтому они
находят широкое применение. В частности зная АФЧХ разомкнутой САУ Wp(j ), можно построить АФЧХ замкнутой САУ
), можно построить АФЧХ замкнутой САУ
Wз(j 

 ) =
) =  = Pз(
= Pз( 

 ) + jQз(
) + jQз( 

 ),
),
65
а по ней - требуемую для частотных методов вещественную ЧХ замкнутой САУ Pз( 

 ). Зная ВЧХ замкнутой САУ, можно приближенно построить переходную характеристику САУ h(t), которую снять экспериментально очень трудно, и по ней определить показатели качества управления.
). Зная ВЧХ замкнутой САУ, можно приближенно построить переходную характеристику САУ h(t), которую снять экспериментально очень трудно, и по ней определить показатели качества управления.
Теоретическое обоснование этого в том, что любую функцию, в том числе и единичную ступенчатую, можно разложить в ряд Фурье:
1(t) = A0 + |
Ak1cos(k t) + Ak2sin(k t)]. |
Так как замкнутая САУ линейна, то при подаче на вход суммы сигналов с выхода снимается сигнал, равный сумме реакций на каждый из входных сигналов. Входному сигналу ui(wi,t) на выходе будет соответствовать составляющая выходного сигнала yi( i,t) = W(j
i,t) = W(j 
 i) ui(
i) ui( 

 i,t), тогда
i,t), тогда
h(t) =  = A0W(0) +
= A0W(0) +  (jkw) [Ak1cos(kwt) + Ak2sin(kwt)].
(jkw) [Ak1cos(kwt) + Ak2sin(kwt)].
Преобразование этого выражения приводит к двум равнозначным формулам определения h(t) через составляющие ВЧХ:
;  ,
,
где P( ) и Q(
) и Q( ) - вещественная и мнимая части АФЧХ замкнутой САУ. Предпочтение обычно оказывают первой формуле, хотя с одинаковым успехом можно использовать и вторую.
) - вещественная и мнимая части АФЧХ замкнутой САУ. Предпочтение обычно оказывают первой формуле, хотя с одинаковым успехом можно использовать и вторую.
Точно вычислить эти интегралы можно только с помощью ЭВМ, но в практике нашел широкое применение приближенный способ построения переходной характеристики на основе линейной аппроксимации ВЧХ замкнутой САУ, который называется метод трапеций. Прежде, чем рассматривать этот метод, рассмотрим без доказательства основные соотношения между ВЧХ замкнутой САУ и ее переходной характеристикой.
13.2. Основные соотношения между ВЧХ и переходной характеристикой
1. Начальное значение ВЧХ P(0) равно установившемуся значению переходной характеристики hуст =  P(
P( 

 ) = P(0).
) = P(0).
66
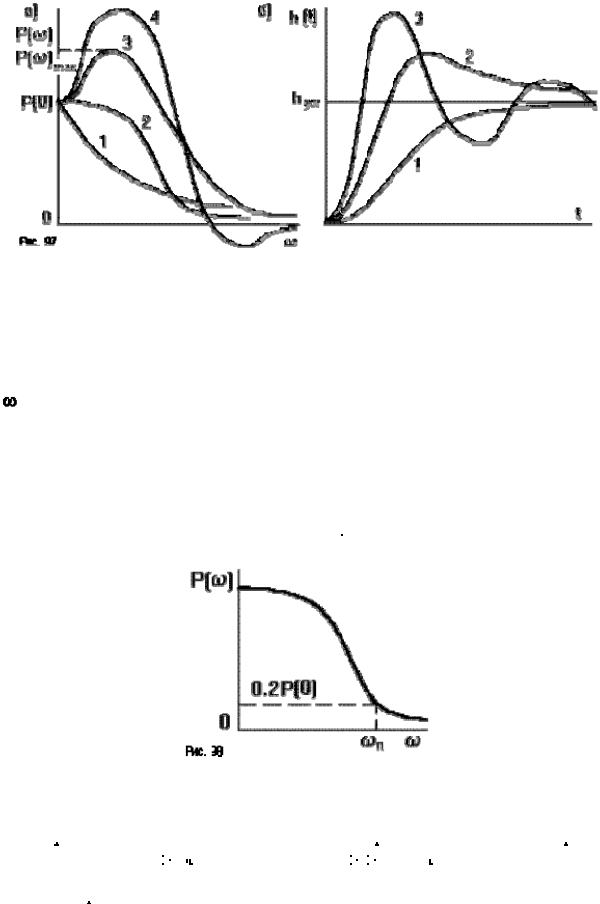
2.САУ с вогнутой ВЧХ (рис.97а кривая 1) не имеет перерегулирования, то есть ей соответствует монотонная переходная характеристика (рис.97б кривая 1).
3.САУ с трапециидальной ВЧХ (рис.97а кривая 2, такую ВЧХ можно аппроксимировать трапецией) имеет апериодическую переходную характеристику (рис.97б кривая 2), причем величина перерегулирования smax не превышает 18%.
4.Кривые 3 и 4 на рис.97а соответствуют колебательной переходной характеристике
(рис.97б кривая 3). Величина перерегулирования smax тем больше, чем больше отношение P( )max/P(0). Если это отношение стремится к бесконечности, то есть имеет место разрыв ВЧХ, то переходная характеристика приобретает вид незатухающих колебаний и САУ переходит на границу устойчивости. Величину перерегулирования можно приблизительно вычислить исходя из соотношения
smax <  .
.
Наличие отрицательного экстремума у ВЧХ (кривая 4) свидетельствует о повышенной колебательности системы.
5. Время переходного процесса tпп можно оценить приблизительно по виду ВЧХ без построения кривой h(t). Оно определяется полосой частот wп, при которых P( ) > 0.2P(0) (рис.98).
) > 0.2P(0) (рис.98). 

 п называют интервалом положительности P(
п называют интервалом положительности P( 

 ). При этом всегда tпп >p/
). При этом всегда tпп >p/ 

 п.
п.
Для кривой 1 рис.97а: tпп  4
4 /
/ п. Для кривой 2: tпп
п. Для кривой 2: tпп 
 (1..4)4
(1..4)4 /
/ п. Для кривых 3 и 4 коэффициент пропорциональности больше, причем он тем больше, чем больше
п. Для кривых 3 и 4 коэффициент пропорциональности больше, причем он тем больше, чем больше
отношение P( 

 )max/P(0).
)max/P(0).

67
13.3. Метод трапеций
Этот метод основан на свойствах ВЧХ, следующих из полученной ранее формулы, которые мы рассмотрим без доказательств.
1. Свойство линейности: если ВЧХ можно представить суммой P( ) = SPi(
) = SPi( ), то каждой составляющей Pi(
), то каждой составляющей Pi( 

 ) будет соответствовать составляющая переходной характеристики
) будет соответствовать составляющая переходной характеристики
,
при этом h(t) =  (рис.99а). Поэтому, если ВЧХ имеет сложную форму, ее можно представить суммой трапециидальных ВЧХ, примыкающих к вертикальной оси. Затем все трапеции перерисовывают, перенося их основания на горизонтальную ось (рис.99б). Каждой такой трапеции соответствует своя составляющая переходной характеристики hi(t), имеющая апериодический характер (рис.99в).
(рис.99а). Поэтому, если ВЧХ имеет сложную форму, ее можно представить суммой трапециидальных ВЧХ, примыкающих к вертикальной оси. Затем все трапеции перерисовывают, перенося их основания на горизонтальную ось (рис.99б). Каждой такой трапеции соответствует своя составляющая переходной характеристики hi(t), имеющая апериодический характер (рис.99в).
Результирующая кривая строится суммированием данных составляющих.
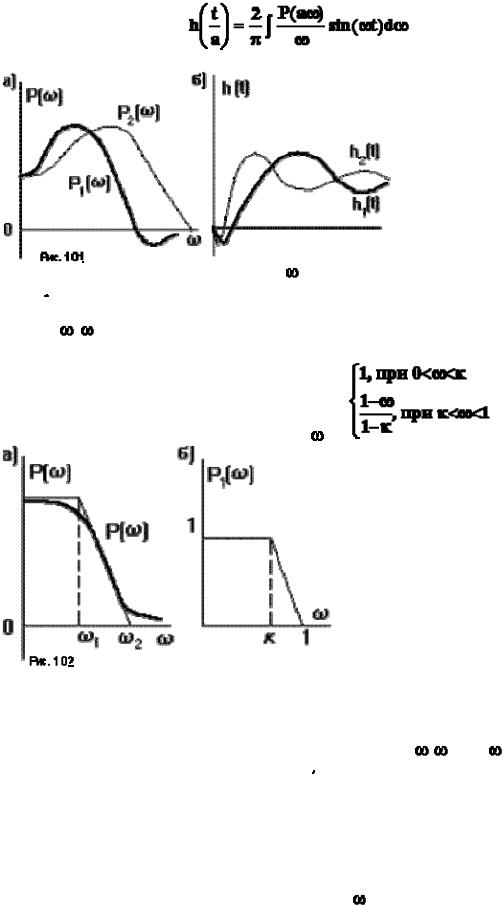
2.Если умножить P( 

 ) на постоянный множитель а, то соответствующая ей h(t) также умножается на а. То есть, чем выше ВЧХ, тем выше и переходная характеристика
) на постоянный множитель а, то соответствующая ей h(t) также умножается на а. То есть, чем выше ВЧХ, тем выше и переходная характеристика
(рис.100).
3.Если аргумент w в выражении ВЧХ P( 

 ) умножить на постоянный множитель а, то аргумент в h(t) будет делиться на это число, то есть
) умножить на постоянный множитель а, то аргумент в h(t) будет делиться на это число, то есть
68
.
То есть переходный процесс в случае P(a ) будет протекать в а раз быстрее, чем в случае P( 

 ) (рис.101).
) (рис.101).
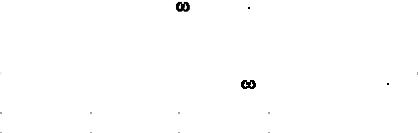
Рассмотрим трапециидальную ВЧХ (рис.102а). Она характеризуется коэффициентом наклона k = 1 2. Под единичной трапецией (рис.102б) понимают трапецию, две стороны которой совпадают с осями координат и равны по 1 в соответствующих
масштабах; наклон k может быть различным: P1( ) = |
. |
Подставляя это определение в выражение для определения h(t) можно вычислить кривую переходного процесса, соответствующую единичной трапециидальной ВЧХ. Эти расчеты были проделаны и составлены таблицы hk -функций.
Для любой трапециидальной ВЧХ, на которые разбита реальная ВЧХ (рис.99б), можно построить подобную ей единичную трапецию со значением k = 1 2, где 1 - частота,
соответствующая перелому реальной трапеции, 

 2 - основание трапеции реальной ВЧХ. Для данной единичной трапеции по таблице hk-функций строят кривую hk(k,t), где t - время. Затем, используя свойства 2 и 3 масштабирования ВЧХ и переходной характеристики строят кривую переходного процесса, соответствующего данной трапециидальной ВЧХ. Причем оба описанных процесса можно совместить: сначала задаются моментом времени t, для него по таблице находят значение hk(k,t), потом умножают это значение на P(0) (масштабирование по вертикальной оси) и откладывают
2 - основание трапеции реальной ВЧХ. Для данной единичной трапеции по таблице hk-функций строят кривую hk(k,t), где t - время. Затем, используя свойства 2 и 3 масштабирования ВЧХ и переходной характеристики строят кривую переходного процесса, соответствующего данной трапециидальной ВЧХ. Причем оба описанных процесса можно совместить: сначала задаются моментом времени t, для него по таблице находят значение hk(k,t), потом умножают это значение на P(0) (масштабирование по вертикальной оси) и откладывают
полученное значение на графике h(t) для времени t = t/ 2 (масштабирование по горизонтальной оси). Строя таким образом точки для различных моментов времени получают кривую
69
hi(t/ 2) = P(0) hk(k,t).
Данный алгоритм удобно оформить в таблицу:
t |
hk(k,t) |
t = t/ |
hi(t) = P(0) |
|
|
2 |
hk(k,t) |
|
|
|
|
..... |
..... |
..... |
..... |
После суммирования составляющих переходного процесса, соответствующих каждой трапеции, получают реальную характеристику h(t).
Описанный метод построения переходной характеристики называется методом трапеций.
Лекция 14. Синтез САУ
14.1.Синтез САУ
ВТАУ можно выделить две характерные задачи: 1) в заданной САУ найти и оценить переходные процессы - это задача анализа САУ; 2) по заданным переходным процессам и основным показателям разработать САУ - это задача синтеза САУ.
Вторая задача сложнее в виду своей неоднозначности, многое определяется творческими способностями проектировщика. Поэтому обычно задачу синтеза САУ ставится ограниченно. Считается, что основная часть системы уже задана, что обычно имеет место. Требуется синтезировать корректирующие звенья, то есть выбрать их схему
ипараметры. При этом необходимо, чтобы в результате коррекции САУ обеспечивался требуемый запас устойчивости; точность управления в установившихся режимах и качество управления в динамических режимах.
70
14.1.1. Включение корректирующих устройств
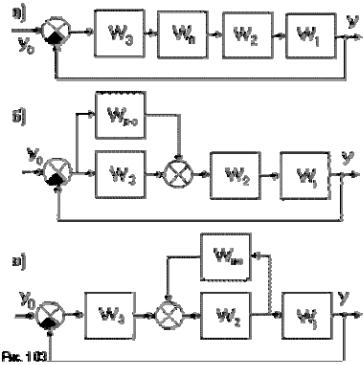
Корректирующее устройство можно включить последовательно, параллельносогласно или параллельно-встречно (по схеме с обратной связью).
Последовательное корректирующее устройство с передаточной функцией Wп включается обычно после предварительного усилителя. На рис.103а предварительный усилитель имеет передаточную функцию W3, выходной каскад усилителя - W2, исполнительный элемент - W1.
Параллельно-согласное корректирующее устройство с передаточной функцией Wпс (рис.103б) может иногда при меньшей сложности обеспечить нужное преобразование сигнала. Например, для коррекции свойств САУ часто требуются дифференцирующие и форсирующие звенья, которые конструктивно очень сложны. В то же время параллельносогласное включение предварительного усилителя (W3 = K3) и простого апериодического
звена с передаточной функцией Wпс =  позволяет реализовать функцию реального форсирующего звена. Такое соединение можно заменить эквивалентным форсирующим звеном с передаточной функцией
позволяет реализовать функцию реального форсирующего звена. Такое соединение можно заменить эквивалентным форсирующим звеном с передаточной функцией
Wф = W3 + Wпс =  ,
,
где Tф1 =  ; Tф2 = Tпс; Kф = K3 + Kпс.
; Tф2 = Tпс; Kф = K3 + Kпс.
Наибольшими возможностями в плане коррекции свойств САУ обладает корректирующее устройство с передаточной функцией Wпв, включенное по схеме с отрицательной или положительной обратной связью, охватывающей один из звеньев САУ, как правило исполнительный элемент или выходной каскад усилителя (усилитель