

Zapiska_moya11
.docМИНОБРНАУКИ РОССИИ
Воткинский Филиал
федерального государственного бюджетного образовательного учреждения
высшего образования
“Ижевский Государственный Технический Университет им. М. Т. Калашникова”
(ВФ ФГБОУ ВО «ИжГТУ имени М.Т. Калашникова»)
Кафедра «Технология машиностроения и приборостроения
Контрольная работа
По дисциплине: «Теория автоматизированного управления»
Выполнил: студент гр. Б05-721-1зт О.В. Русанова
Проверил: к.т.н, доцент И. А. Давыдов
Воткинск,2016
Электрогидравлическая следящая система
с дроссельным управлением (станки с ЧПУ)
-
Исходные данные
|
№ вар. |
ЭУ |
ЭМУЭ |
ГУ |
ГИМ |
ОС |
||
|
Кэу |
Тэмуэ |
Кэмуэ |
Тгу |
Кгу |
Кгим |
Кос |
|
|
- |
с |
мм/В |
с |
л/(мм с) |
мм/л |
В/мм |
|
|
6 |
500 |
0,15 |
0,05 |
0,08 |
1,3 |
? |
0,015 |
1.1 Принципиальная схема системы управления
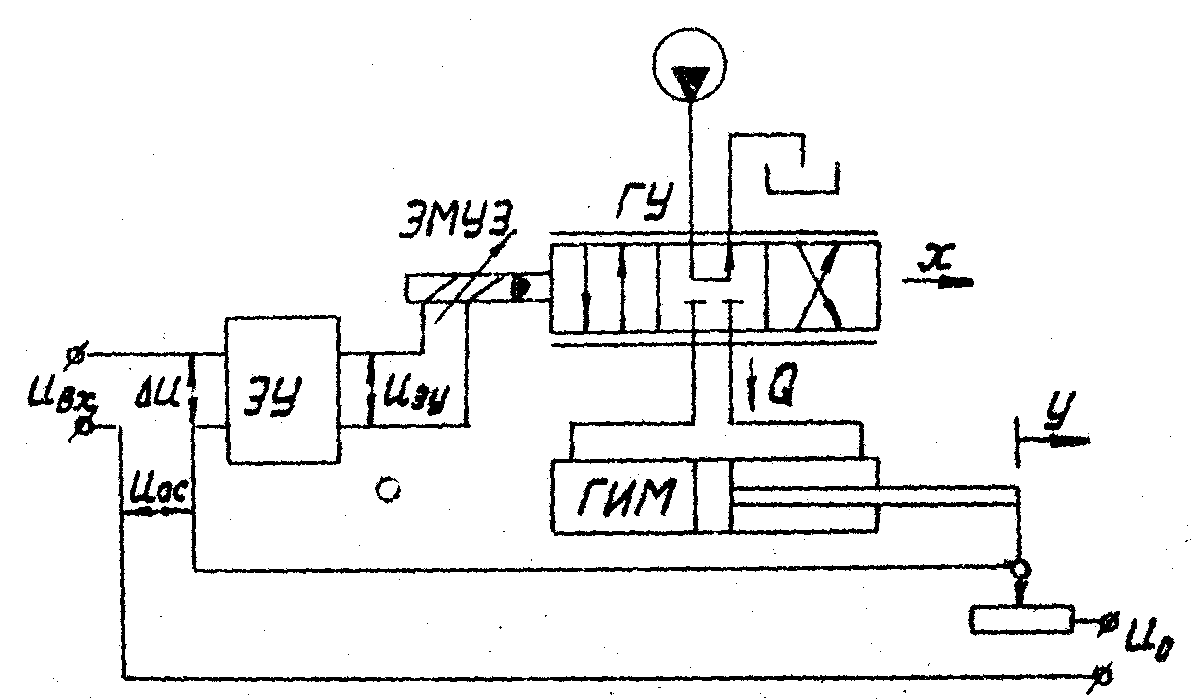
Рис. 1. Принципиальная схема САУ

Рис. 2. Структурная схема САУ.
1.3. Уравнения динамики элементов системы управления
Электронный усилитель (ЭУ):
![]() (1)
(1)
где UЭУ – напряжение на выходе из электронного усилителя;
КЭУ – коэффициент усиления электронного усилителя;
ΔU – напряжение на входе электронного усилителя (рассогласование системы).
Электромеханический управляющий элемент (ЭМУЭ):
![]() (2)
(2)
где ТЭМУЭ – постоянная времени ЭМУЭ;
х – смещение якоря ЭМУЭ;
КЭМУЭ – коэффициент передачи ЭМУЭ;
Гидравлический усилитель (ГУ):
![]() (3)
(3)
где ТГУ – постоянная времени гидроусилителя;
Q – поток рабочей жидкости, направляемый в исполнительный механизм;
КГУ – коэффициент передачи гидроусилителя.
Гидравлический исполнительный механизм (ГИМ).
![]() (4)
(4)
где y – смещение исполнительного органа;
КГИМ – коэффициент передачи ГИМ.
Обратная связь (ОС):
![]() (5)
(5)
где UОС – напряжение на выходе ОС;
КОС – коэффициент передачи ОС.
1.4 Значения параметров элементов САУ
Кэу=500
Тэмуэ=0,15 с
Кэмуэ=0,05 мм/В
Тгу=0,08 с
Кгу=1,3 л/(мм∙с)
Кгим= ?
Кос=0,015 В/мм
2. Анализ элементов системы управления
2.1. Типы элементов системы управления
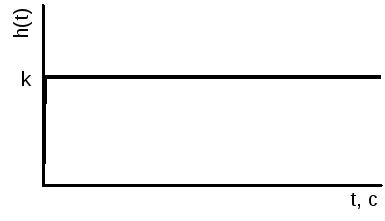
Электронный усилитель (ЭУ) – Пропорциональное идеальное звено
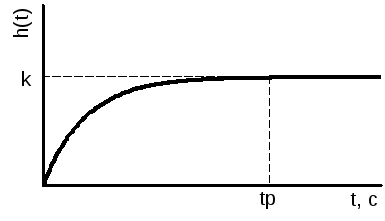
Электромеханический управляющий элемент (ЭМУЭ)-
Пропорциональное инерционное звено
Гидравлический усилитель (ГУ) - Пропорциональное инерционное звено
Гидравлический исполнительный механизм (ГИМ)-
Интегрирующее идеальное звено
Обратная связь (ОС)- Пропорциональное идеальное звено
2.2. Переходные характеристики элементов
Э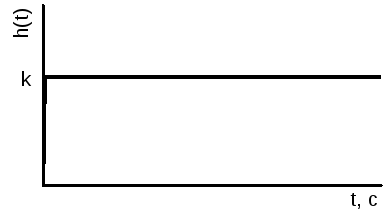 лектронный
усилитель
лектронный
усилитель
Электромеханический управляющий элемент

Гидравлический усилитель
Гидравлический исполнительный механизм

Обратная связь
2.3. Уравнения статики элементов
|
Электронный усилитель |
|
|
Электромеханический управляющий элемент |
|
|
Гидравлический усилитель |
|
|
Гидравлический исполнительный механизм |
|
|
Обратная связь |
|
2.4. Статические характеристики элементов
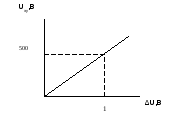
Электронный усилитель
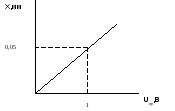
Электромеханический управляющий элемент
Гидравлический усилитель
Qгу,л/с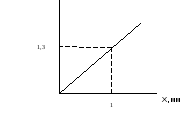
Гидравлический исполнительный механизм
Y,
мм
Обратная связь
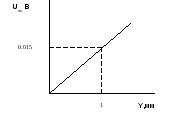
2.5 Передаточные функции элементов САУ
Электронный усилитель (ЭУ):
![]() (6)
(6)
Электромеханический управляющий элемент (ЭМУЭ):
- операторное уравнение
![]()
-передаточная функция
![]() (7)
(7)
Гидравлический усилитель (ГУ):
-операторное уравнение
![]()
-передаточная функция
![]() (8)
(8)
Гидравлический исполнительный механизм (ГИМ):
-операторное уравнение
![]()
-передаточная функция
![]() (9)
(9)
Обратная связь (ОС):
![]() (10)
(10)
3. Анализ системы управления
3.1. Описание работы системы управления
На первом этапе элемент сравнения сравнивает напряжение выходное (задающее) с напряжением обратной связи. Если имеется разница ΔU сигнал поступает на электронный усилитель, затем усиленный сигнал обрабатывается электронно-механическим управляющим элементом, который воздействует на гидравлический усилитель. Тот в свою очередь управляет гидравлическим исполнительным механизмом, который задает положение штока. Это положение штока исправляет (выравнивает) ошибку отклонения выходного напряжения. В случае отсутствия ΔU, задающее напряжение передается на выход.
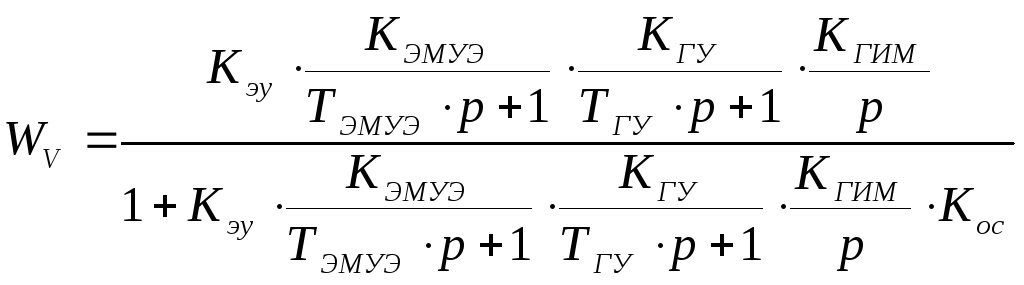
3.2. Передаточная функция для выходного сигнала
В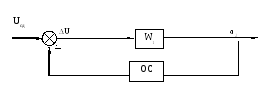 структурной схеме заменяется прямая
цепь последовательно соединённых
звеньев одним звеном W1:
структурной схеме заменяется прямая
цепь последовательно соединённых
звеньев одним звеном W1:
W1=Wэу·Wэмуэ·Wгу·Wгим·Wос
![]()
![]()
![]()
В общем виде:
![]() (12)
(12)
Полиномиальные коэффициенты:
![]() (13)
(13)
![]() (14)
(14)
![]() (15)
(15)
![]() (16)
(16)
![]() (17)
(17)
3.3. Уравнение динамики для выходного сигнала
В соответствие с передаточной функцией получается:
-
операторное уравнение:
-
дифференциальное уравнение:
![]() (18)
(18)
3.4. Уравнение статики и статическая характеристика для выходного сигнала
Уравнение статики:
![]()
Статическая характеристика:
4. Выбор параметра системы управления
4.1. Диапазон параметра, в котором система устойчива
Данная система управления описывается уравнением динамики 3-го порядка.
Условие устойчивости Гурвица для системы 3-го порядка:


Решая систему неравенств находим диапазон параметра «kгим», в котором система управления устойчива:
Решая эту систему неравенств с учетом (13) – (17) относительно Кгим получаем диапазон устойчивости САУ:
0< Kгим < 39 мм/л
4.2. Влияние параметра на качество переходного процесса
Интегральная квадратичная оценка для данной системы управления, описываемой передаточной функцией, определяется такой формулой:
![]()
![]()


Тогда формула принимает такой вид:
![]()

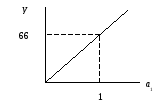
Графически зависимость интегральной квадратичной оценки от параметра «kгим» в диапазоне устойчивости выглядит так:
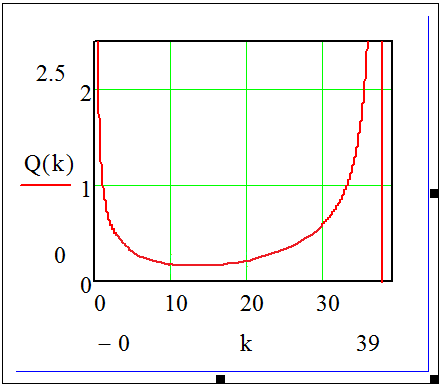
Наилучшее значение «kгим» будет соответствовать минимальному значению интегральной квадратичной оценки.
Значение параметра для наилучшей работы системы в переходном режиме определяется по графику примерно:
Kгим = 10
6. Моделирование работы системы управления
-
Переходная характеристика системы управления
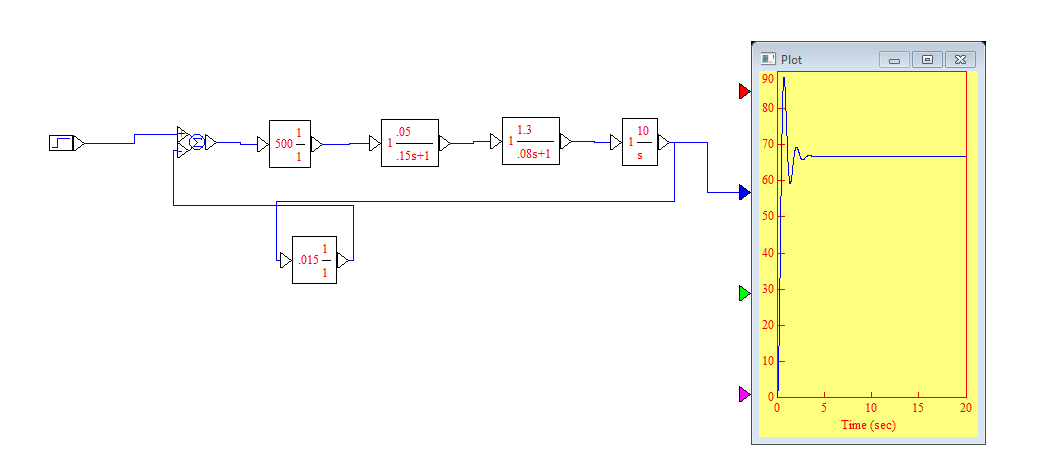
Переходная характеристика получена при оптимальном значении параметра kгим=10.
Время регулирования системы управления составляет примерно5 с.
Установившееся значение управляемого сигнала на Yуст=66 об/с.
-
Проверка диапазона устойчивости

В блоке ГИМ значение параметра изменяется с оптимального на границу устойчивости 39.
-
Проверка влияния параметра на качество переходного процесса
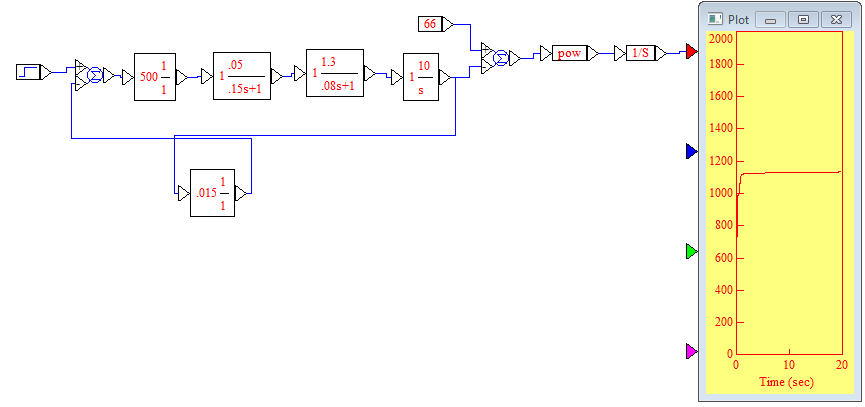
При моделировании подтвердилось, что для оптимального значения параметра kгим=10 интегральная квадратичная оценка накапливается до величины примерно 1,1*103
Проверка
![]()
В
формулу

Подставляем значение kгим=10

Значение
![]() =1143
подтвердилось при моделировании процесса
и на графике зависимости квадратичной
оценки от параметра « kгим».
=1143
подтвердилось при моделировании процесса
и на графике зависимости квадратичной
оценки от параметра « kгим».