

Б-1
Определение
статических нагрузок является важным
этапом проектирования эл.привода. Оно
необходимо для построения нагрузочной
диаграммы, выбора мощности двигателя
и проверки его по нагреву. Характер
нагрузок и пределы их изминения в
значительной степени определяют режимы
работы и выбор схемы эл.привода. Изминение
нагрузки является основным возмущением
при работе эл.привода, поэтому без знания
пределов в которых она может изминятся,
нельзя обеспечить требуюмую точность
регулирования координат. Статические
моменты подразделяют на активные и
реактивные. ![]() -активный
момент прикладываемый к рабочему органу
машины, этот момент создается силами
тяжести силами ветра и др.Могут как
препятствовать движению так и наоборот.
Поэтому знак может быть либо + либо -.
Мср- реативный момент сопротивления
движению, возникает как реакция на
движения рабочего органа и всегда
препятствует движению. К реактивным
так же относятся момент сил трения в
подшипниках и др. элементах кинематической
цепи. Статический момент Мс=Мса+Мср
-активный
момент прикладываемый к рабочему органу
машины, этот момент создается силами
тяжести силами ветра и др.Могут как
препятствовать движению так и наоборот.
Поэтому знак может быть либо + либо -.
Мср- реативный момент сопротивления
движению, возникает как реакция на
движения рабочего органа и всегда
препятствует движению. К реактивным
так же относятся момент сил трения в
подшипниках и др. элементах кинематической
цепи. Статический момент Мс=Мса+Мср
![]() =Мдв+Мс
Статический момент ха-ет установившейся
режим работы эл. привода. Статические
нагрузки могут существенно изменятся
при наличии уклона или воздействии
ветра. В общем виде Fс=Fгр+Fтр+Fвяз;
Ктр=2Кp((Mdц/2)+f)Dk.
Dk-диаметр
ходового колеса. Статический момент в
случае когда результирующая сила
направлена против движения т.е. является
тормозной Мст=FcDk/inm.
А если по движению Мст= FcDknm/2i
=Мдв+Мс
Статический момент ха-ет установившейся
режим работы эл. привода. Статические
нагрузки могут существенно изменятся
при наличии уклона или воздействии
ветра. В общем виде Fс=Fгр+Fтр+Fвяз;
Ктр=2Кp((Mdц/2)+f)Dk.
Dk-диаметр
ходового колеса. Статический момент в
случае когда результирующая сила
направлена против движения т.е. является
тормозной Мст=FcDk/inm.
А если по движению Мст= FcDknm/2i
б-2
Qтеор=3600КнЕ/Кptц- теоритическая производительность. Кн-коэф.ковша. Е-геометр.емкость ковша. Кp-коэф.разрыхления грунта.Каждое звено описывается диф.уравнением. необходимо учесть все нелинейности в периводе.
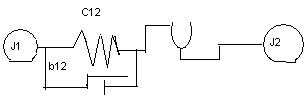 b12
вязкое трение. Fвяз=b12(W1-W2)
b12
вязкое трение. Fвяз=b12(W1-W2)
![]() Схема
замещения механизма. В механизме звенья
движутся с различной скоростью и
совершают различные виды движения. J1-
момент инерции двигателя и жестко
связанных с ним частей механизма.(якорь,
ротор, соидинительную муфту). J2-
привиденый к скорости вращения вала
двигателя момент инерции механизма и
жестко связанных с ним частей.
С12-эквивалентное привиденое жесткость
упругой мех. части. ФИз- привиденый
кинематический зазор механизма. Для
J1:
М-эл.магнитный момент развиваемый
двигателем. М12-привиденый момент нагрузки
упругого элемента. W1-
угловая скорость вращения вала двигателя.
ФИ1- угол поворота вала двигателя. Для
J2
; М12-привиденый момент нагрузки упругого
элемента. Мс- привиденый момент
статической нагрузки. W2-привиденая
угловая скорость вала. ФИ2-Угол поворота
вала двигателя. ДМС: Уравнения движения
привода:
Схема
замещения механизма. В механизме звенья
движутся с различной скоростью и
совершают различные виды движения. J1-
момент инерции двигателя и жестко
связанных с ним частей механизма.(якорь,
ротор, соидинительную муфту). J2-
привиденый к скорости вращения вала
двигателя момент инерции механизма и
жестко связанных с ним частей.
С12-эквивалентное привиденое жесткость
упругой мех. части. ФИз- привиденый
кинематический зазор механизма. Для
J1:
М-эл.магнитный момент развиваемый
двигателем. М12-привиденый момент нагрузки
упругого элемента. W1-
угловая скорость вращения вала двигателя.
ФИ1- угол поворота вала двигателя. Для
J2
; М12-привиденый момент нагрузки упругого
элемента. Мс- привиденый момент
статической нагрузки. W2-привиденая
угловая скорость вала. ФИ2-Угол поворота
вала двигателя. ДМС: Уравнения движения
привода:
М-М12=J1dW1/dt, W1=dФИ/dt
М12- Мс= J2dW2/dt, W2= dФИ/dt
Где М12=С12(ФИ1-ФИ2)
Диф.уравнение для М12
(D^2)M12/((Ω^2)d(t^2))+ M12=J∑E+ Мс
(D^3)W1/((Ω^2)d(t^3))+dW1/dt=E
Где (Ω12^2)=√(С12 J∑/ J1 J2) Е- собственная частота колебаний ДМС Е=М- Мс/ J∑- ускорение ДМС. Кд=М12мах/М12ср Y= J∑/ J1- коэф. Соотношения моментов инерции.(1.3-2) ЛПП- протекало при Мд>>, E>> очень малая длительность пер.процесов tпп<</ ТПП Мg<<,E<< tпп>>
C12=∞, ψз=0, dМ/dt=0, tотс=1, Мс- const
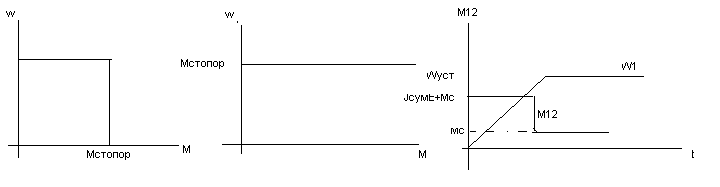
При Котс=1 длительность пуска привода будет наименьшей.
(Ω12^2)=√(С12 J∑/ J1 J2) Е, fz= Ω12. Fz- зубцовое возмущение представляет собой внутренние воздействие и по своей природе динамическое возмущающие воздействие .
Fz- WпиZзв=W1Zзв/iр Для большинства экскаваторов fz= Ω12 находятся в пределах (0,4-0,6) При каждом разгоне двигатель пройдет через зону (0,4-0,6)Wуст
 Основным
способом ограничения нагрузок является
демпфир.способность эл.привода. Отстройка
от резонанса- нужно обеспечить такую
работу поворота что бы Fz,
Ω12 не совпадали. Подходят 2 путями
:Уменьшение С12,
Ω12,
Wдв<<Wуст
В кинематическую цепь вводят упругие
звенья с помощью которых уменьшают
2: Увеличивают С12
так увеличить что бы Wдв>>Wуст
Для этого используют тихоходные
двигатели. Привод будет без редукторный.
Демпфирование эл.привода существенно
снижает эл.нагр, а в редукторных явл
необходимым условием работы экскаватора.
В много двигательном эл.приводе схема
соидинения якорей двигателей и
расположение редукторов на поворотной
платформе должны обеспечить мах демпфир
способность.
Основным
способом ограничения нагрузок является
демпфир.способность эл.привода. Отстройка
от резонанса- нужно обеспечить такую
работу поворота что бы Fz,
Ω12 не совпадали. Подходят 2 путями
:Уменьшение С12,
Ω12,
Wдв<<Wуст
В кинематическую цепь вводят упругие
звенья с помощью которых уменьшают
2: Увеличивают С12
так увеличить что бы Wдв>>Wуст
Для этого используют тихоходные
двигатели. Привод будет без редукторный.
Демпфирование эл.привода существенно
снижает эл.нагр, а в редукторных явл
необходимым условием работы экскаватора.
В много двигательном эл.приводе схема
соидинения якорей двигателей и
расположение редукторов на поворотной
платформе должны обеспечить мах демпфир
способность.
Б-3
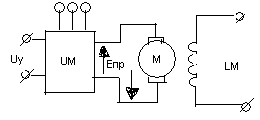 Епр=Едв+IяRя+
Епр=Едв+IяRя+![]()
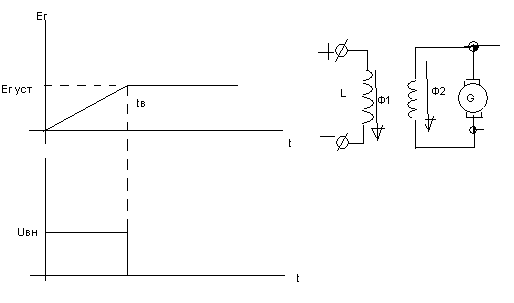
Епр= Едв Вывод:1- Характер и длительность п.п. полностью определяется зависимостью ЭДС преобразователя Епр=f(t). 2-На участке п.п. где ток якоря есть величина постоянная ускорение будет полностью определятся первой производной. dEпр/dt=cdw/dt=cE ; E=1dEпр/сdt : 1. Конструктивное исполнение: ГД-это магнитный преобразователь т.е. имеет вращательные части при эксплуатации. (-) Требует ремонта, массивного фундамента, при ремонте значительные затраты. ТП- статический преобразователь поэтому требует тока технического осмотра. Сокращает продолжительность и стоимость на ремонт. 2-ГПТ-обладает значительной э/м инертностью поэтому необходимо форсирование п.п. генератора. В ГПТ исключена возможность нарастания ЭДС генератора скачком что явл естественной защитой от опасных ускорений. ТП- имеет принципиальную возможность скачкообраного изминения ЭДС во времени. Благодаря высокому быстродействию все скачки нагрузки передаются в сеть и наоборот.
Б-4
ГПТ-обладает значительной э/м инертностью поэтому необходимо форсирование п.п. генератора. В ГПТ исключена возможность нарастания ЭДС генератора скачком что явл естественной защитой от опасных ускорений. ТП- имеет принципиальную возможность скачкообраного изминения ЭДС во времени. Благодаря высокому быстродействию все скачки нагрузки передаются в сеть и наоборот. ГПТ с НВ как звено автоматизированного эл.привода. Wг=Ег(р)/Uв(р)=Кг/(ТгР+1); Тг=Тв; Тг=(1,-4) с. Uв=КфUвн; Кф=1/(1-е^(-tв/Тг); Рв=(2-5)%Ргн
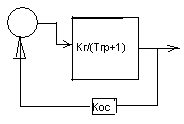 (ТгР+1)Ег=Кг
Uв;
(ТгР+1)Ег= Uв+КосЕг;
(ТгР+1-КгКос)Ег=Кг Uв;
((Тг/1-КгКос)+1)Ег=Кг Uв
/(1-КгКос); Кос(возрастает)=Кг/
(1-КгКос)(возрастает); если 1=КгКос то
Wг(р)=Кг/Тгр-
интегрирующие звено. Возбудитель-генератор
ПТ.(эл.магнитный усилитель) ЭМУ- машина
постоянного тока у которого имеется 2
комплекта щеток. Для формирования п.п.
ЭМУ выбирается обычно с 3-4х кратным
запасом по напряжению и в установившехся
режимах при номинальной скорости
эл.привода его напряжение в 3-4 раза
меньше номинального. Т.к остаточная ЭДС
ЭМУ может достигать 10-15% номинального
значения , возможный разброс значений
ЭДС ЭМУ обусловленный петлей гистирезиса
соизмерим с напряжением , необходимым
для получения номинального напряжения
генератора и вызывает нестабильность
статических характеристик и п.п.
эл.привода. Жесткая отрицательная связь
по напряжению ЭМУ сужает петлю гистерезиса
в требуемой степени. Однако при этом
снижается коэфицент усиления ЭМУ и
увеличивается его колебательность.
(ТгР+1)Ег=Кг
Uв;
(ТгР+1)Ег= Uв+КосЕг;
(ТгР+1-КгКос)Ег=Кг Uв;
((Тг/1-КгКос)+1)Ег=Кг Uв
/(1-КгКос); Кос(возрастает)=Кг/
(1-КгКос)(возрастает); если 1=КгКос то
Wг(р)=Кг/Тгр-
интегрирующие звено. Возбудитель-генератор
ПТ.(эл.магнитный усилитель) ЭМУ- машина
постоянного тока у которого имеется 2
комплекта щеток. Для формирования п.п.
ЭМУ выбирается обычно с 3-4х кратным
запасом по напряжению и в установившехся
режимах при номинальной скорости
эл.привода его напряжение в 3-4 раза
меньше номинального. Т.к остаточная ЭДС
ЭМУ может достигать 10-15% номинального
значения , возможный разброс значений
ЭДС ЭМУ обусловленный петлей гистирезиса
соизмерим с напряжением , необходимым
для получения номинального напряжения
генератора и вызывает нестабильность
статических характеристик и п.п.
эл.привода. Жесткая отрицательная связь
по напряжению ЭМУ сужает петлю гистерезиса
в требуемой степени. Однако при этом
снижается коэфицент усиления ЭМУ и
увеличивается его колебательность.
Б-5
ГПТ-обладает значительной э/м инертностью поэтому необходимо форсирование п.п. генератора. В ГПТ исключена возможность нарастания ЭДС генератора скачком что явл естественной защитой от опасных ускорений. ТП- имеет принципиальную возможность скачкообраного изминения ЭДС во времени. Благодаря высокому быстродействию все скачки нагрузки передаются в сеть и наоборот.
Есть ни что иное как генератор смешанного возбуждения. 1. Магнитные потоки должны быть направлены сонаправлено. 2. Коэфицент передачи должен быть такой что бы выполнялось условие 1=КгКс; Кос=1/Кг; Пар. Обмотка возбуждения является обратной связью.
 При
Iя-
const/
Если увеличить Кг то можно возбудить
двигатель 1000 квт возбудителем 15 квт.
Система Г-Д традиционное техническое
решение приммняется на приводах большой
мощности. Система Г-Д обладает 2х сторонней
проводимостью т.е есть естественная
возможность работы привода во всех 4
квадрантах. Основной недостаток явл
наличие 2х дополнительных эл.машин.
При
Iя-
const/
Если увеличить Кг то можно возбудить
двигатель 1000 квт возбудителем 15 квт.
Система Г-Д традиционное техническое
решение приммняется на приводах большой
мощности. Система Г-Д обладает 2х сторонней
проводимостью т.е есть естественная
возможность работы привода во всех 4
квадрантах. Основной недостаток явл
наличие 2х дополнительных эл.машин.
6. Тиристорный преобразователь постоянного тока. Передаточная функция.
ТП классифицируют:
1) По числу фаз (одно, многофазные)
В зависимости от мощности
Пульсности Частота выпрямленной сети fed = k*fe.
2) Способы включения нагрузки (нулевая и мостовая схемы) f «м»= 2f«н»
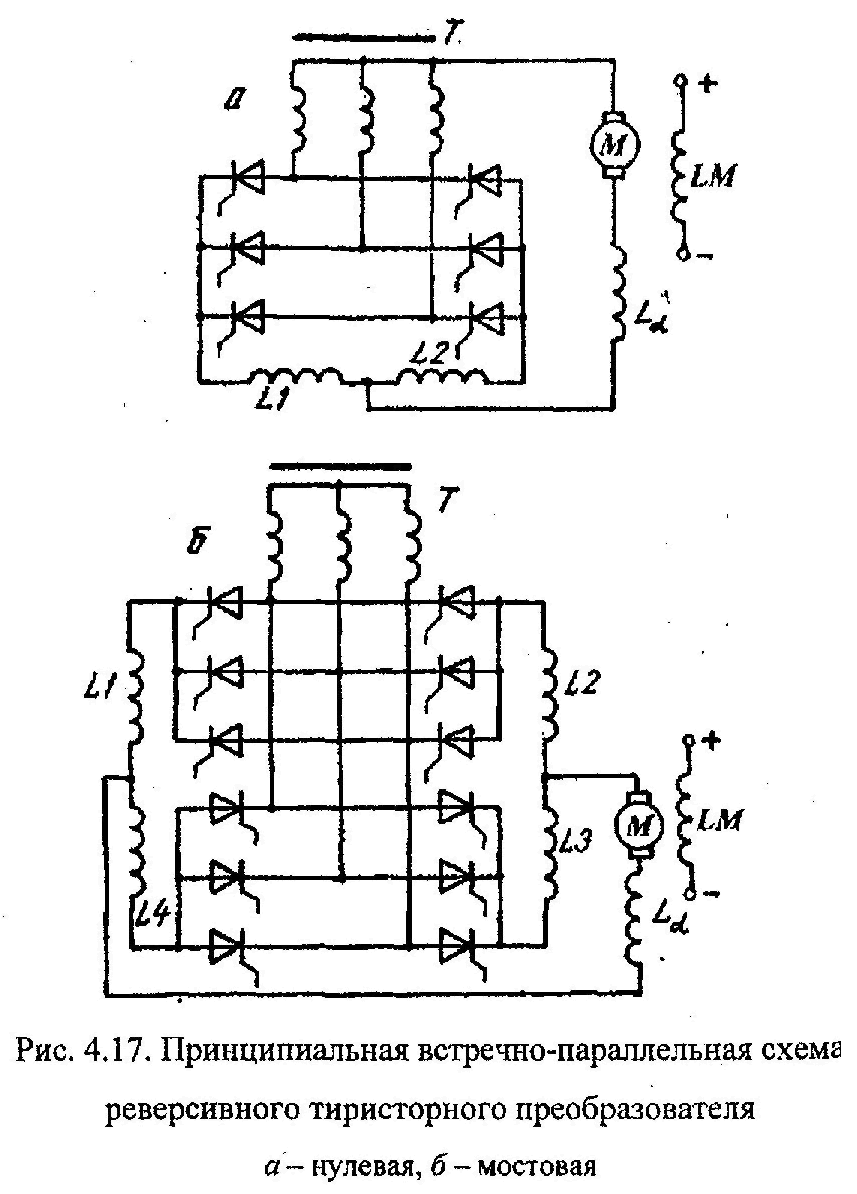
«+» мостовой: Качество (не высокие пульсации); Не нужно «0» точки, можно подключить по без трансформаторной схеме; Направление токов по 2-ой обмотке транс-ов в каждый момент времени встречное, т.е. нет подмагничивающего эффекта в обмотках тр-ра.
«-» количество тиристоров в 2 раза больше чем в нулевой схеме, (дороже).
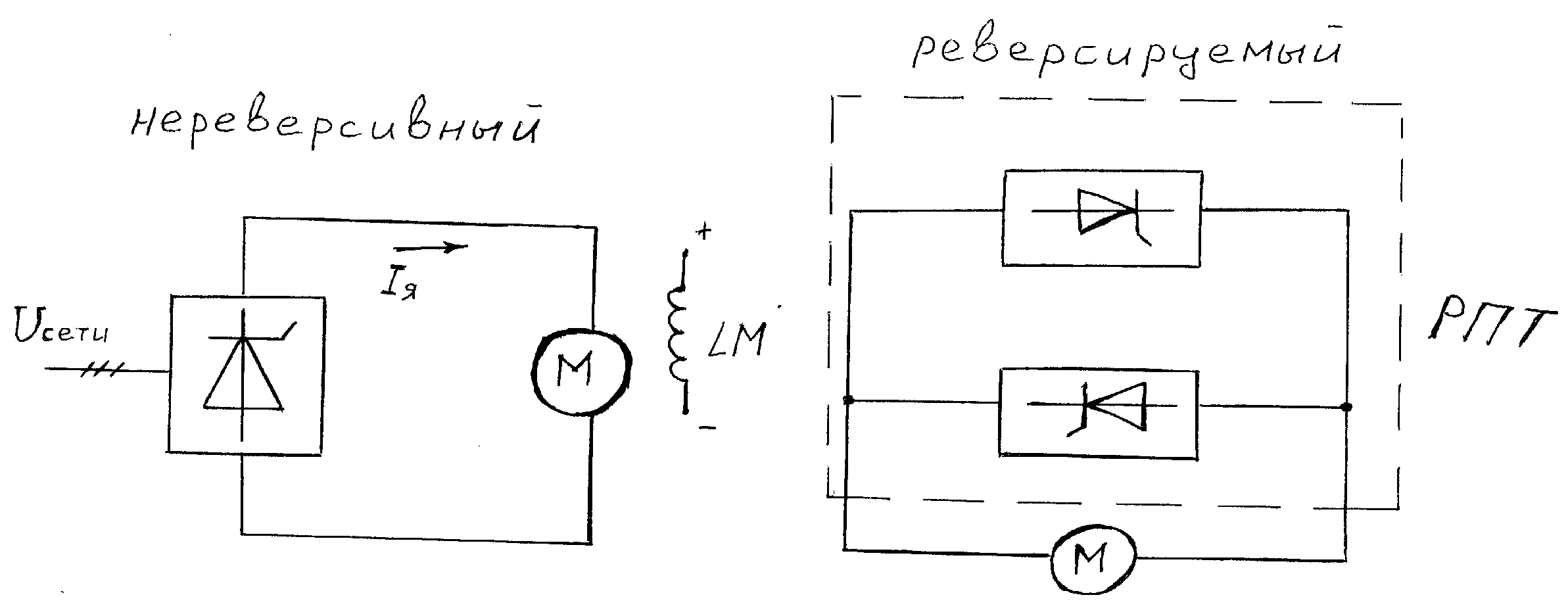
3) реверсивные и нереверсивные
 В
ТП имеют место уравнительные токи,
неравномерность открывания тиристоров,
погрешность быстродействия.
В
ТП имеют место уравнительные токи,
неравномерность открывания тиристоров,
погрешность быстродействия.
Способы управления ТП: согласованное управление группами вентелей; раздельное.
При раздельном управлении гр. вентелей уравнительный ток отсутствует, по этому почти везде имеет место раздельное управление.
![]() -
для случая непрерывного тока (существует
индуктивная нагрузка).
-
для случая непрерывного тока (существует
индуктивная нагрузка).
Ed
– выпрямленное напряжение; τ- запаздывание![]() ,
К- количество фаз, τ≈0.
,
К- количество фаз, τ≈0.
![]() ,
СИФУ: ТТП=Тфильтра
сифу≈0,01-0,02с.
,
СИФУ: ТТП=Тфильтра
сифу≈0,01-0,02с.
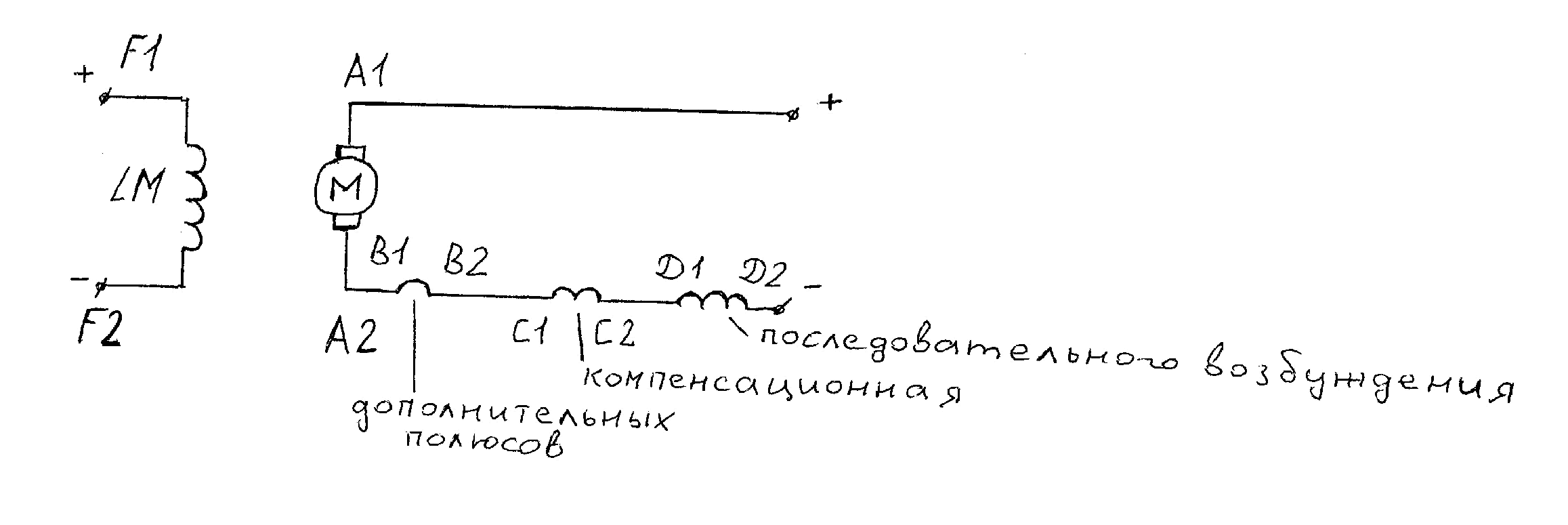
7. Дпт. Структурная схема. Статические и динамические свойства (при различных способах регулирования).
В экскаваторных ЭП в основном используют ДПТ с НВ.
![]()
![]() ;
;![]() ,P=Mω.
,P=Mω.
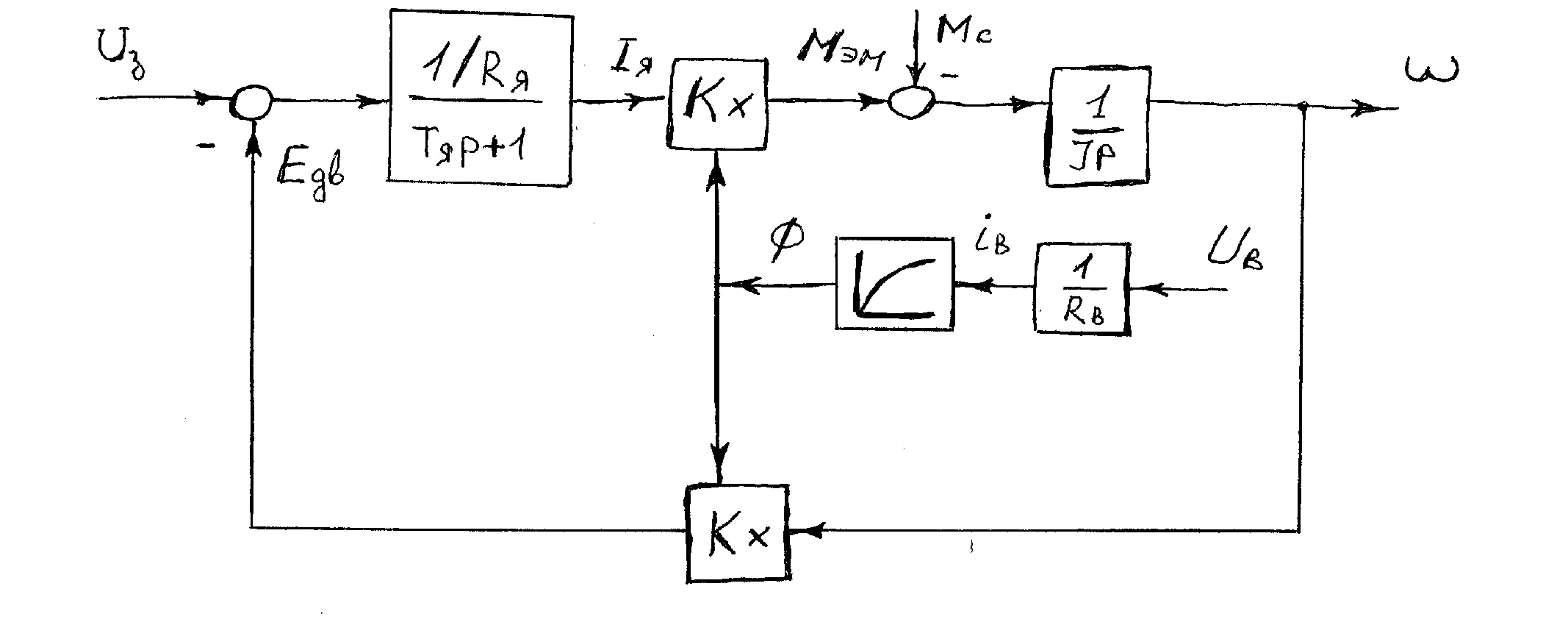
Принимаем Ф=const, кФ=С
К=рN/2πа, где N- число активных проводников обмотки якоря,
а – число пар параллельных ветвей обмотки якоря
![]() -
электро-магнитная постоянная времени
цепи якоря
-
электро-магнитная постоянная времени
цепи якоря
![]() -
электро-механическа постоянная времени
якоря двигателя.
-
электро-механическа постоянная времени
якоря двигателя.
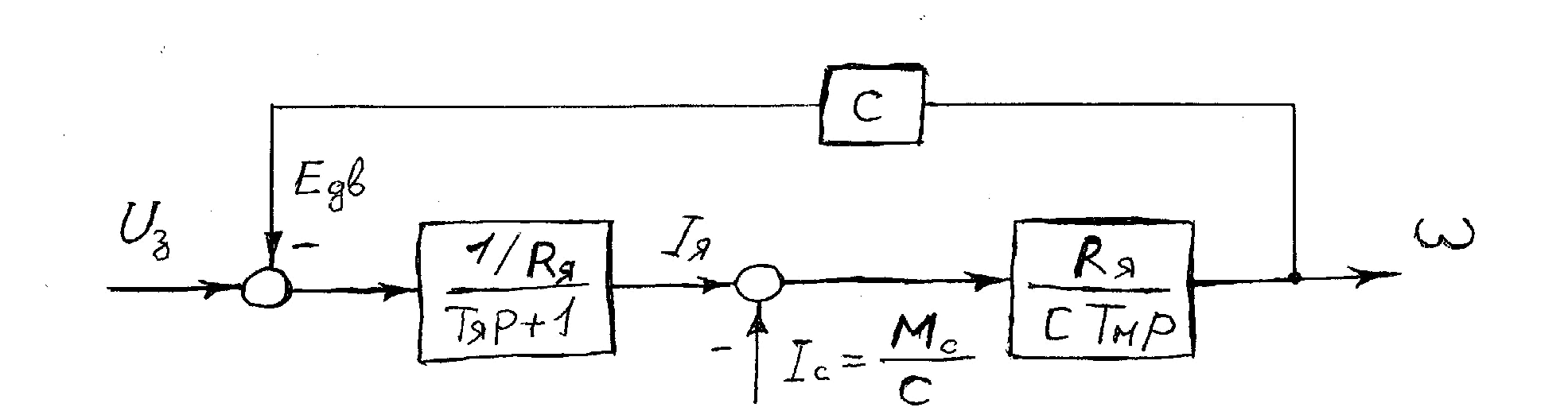
Передаточная функция по управляющему воздействию

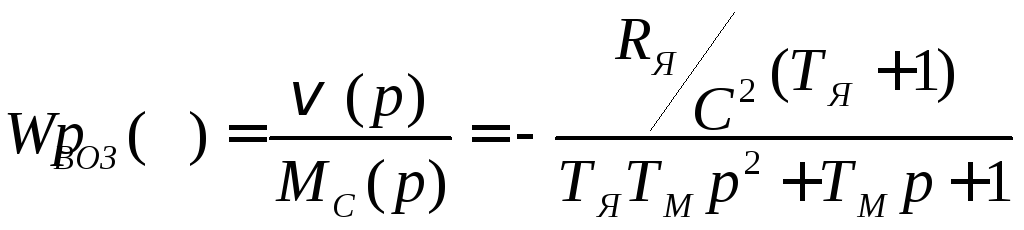
По возмущающему воздействию
Допустимые пределы изменения основных координат:
1) U≤UН, в пределах допускается 2-х кратное повышение UН.
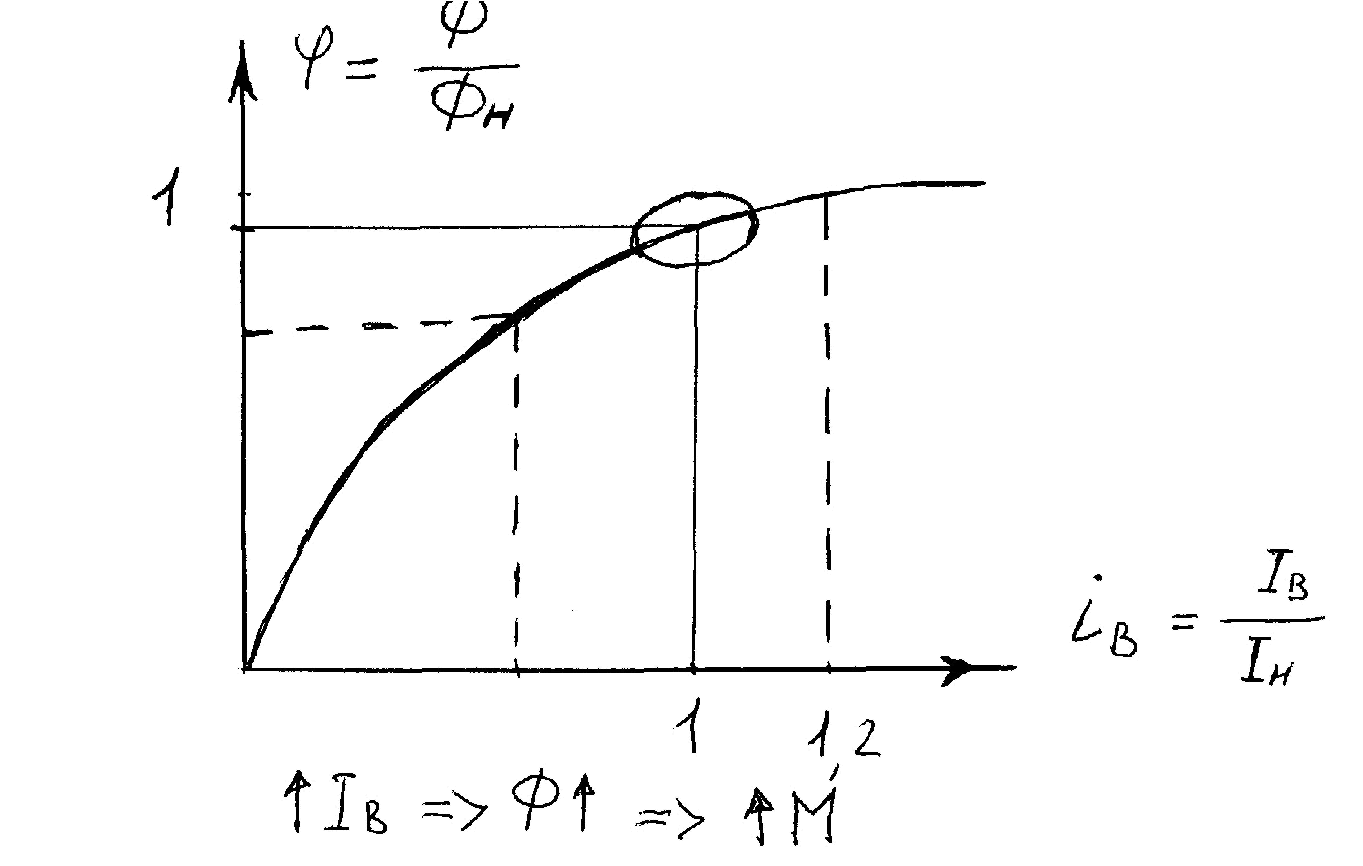
2) Ф можно изменять только за счет тока возбуждения M=kФIЯ, для форсирования ПП Ф изменяется UВ= (2-3)Uвн, кратковременно Kф двиг=7-10.
3) Угловая скорость ωmax≤(1,2-1,3)ωн, для ДПТ у которых предусмотрена работа с ослабленным магнитным потоком допускается превышение в (3-4) раза номинала.
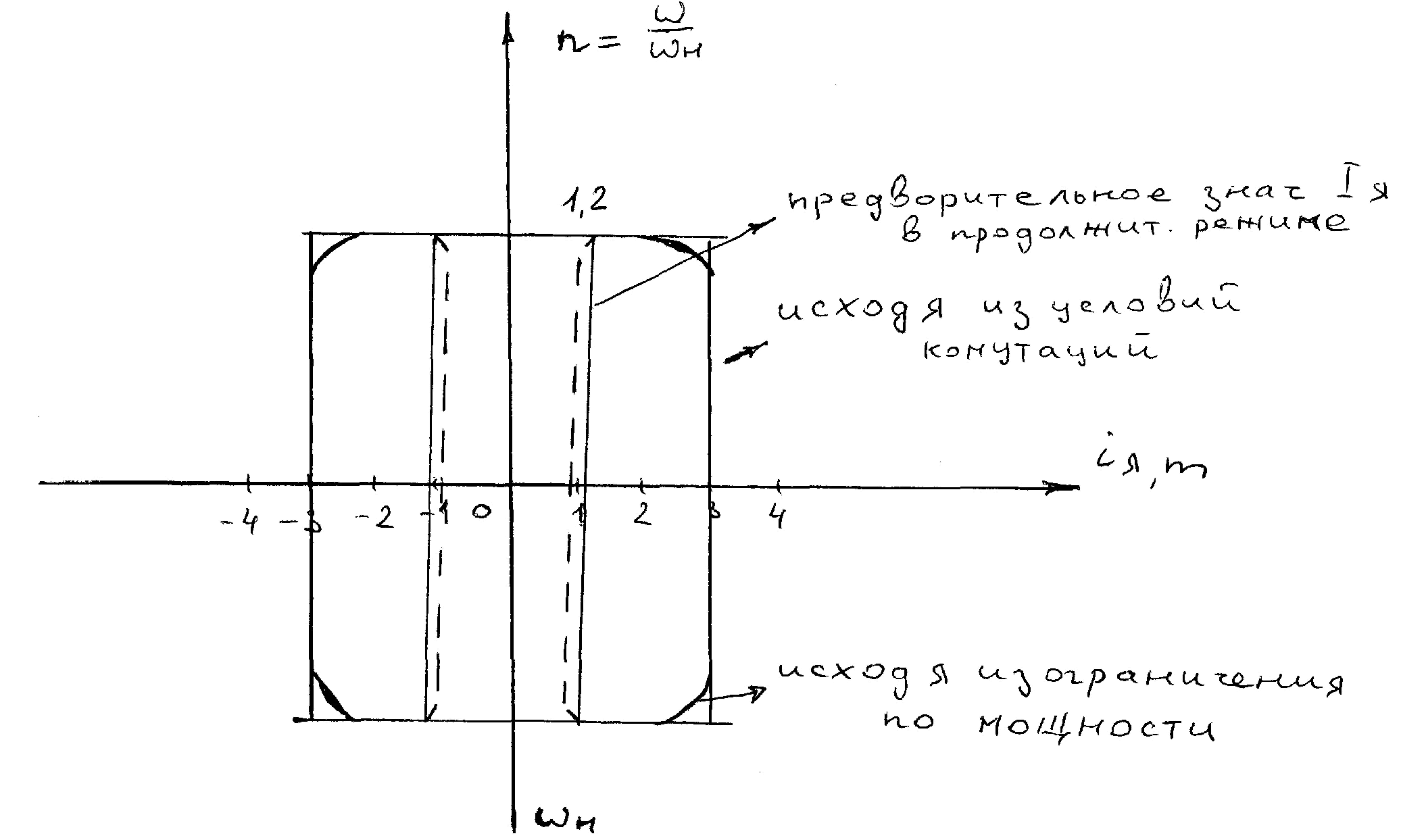
4) Ток якоря определяет надежность работы ЭП. В продолжительном режиме работы ток якоря IЯ≤Iн. При малых скоростях в двигателях с самовентиляцией необходимо ограничение тока на 30-40% номинала IЯ≤(0,6-0,7)Iн. В кратковременных режимах IЯ≤(2-3)Iн исходя из условий коммутации.
5) Момент при Ф=const , то требования ограничения те же что и по току.
РЕГУЛИРОВАНИЕ КООРДИНАТ:
Ф=var
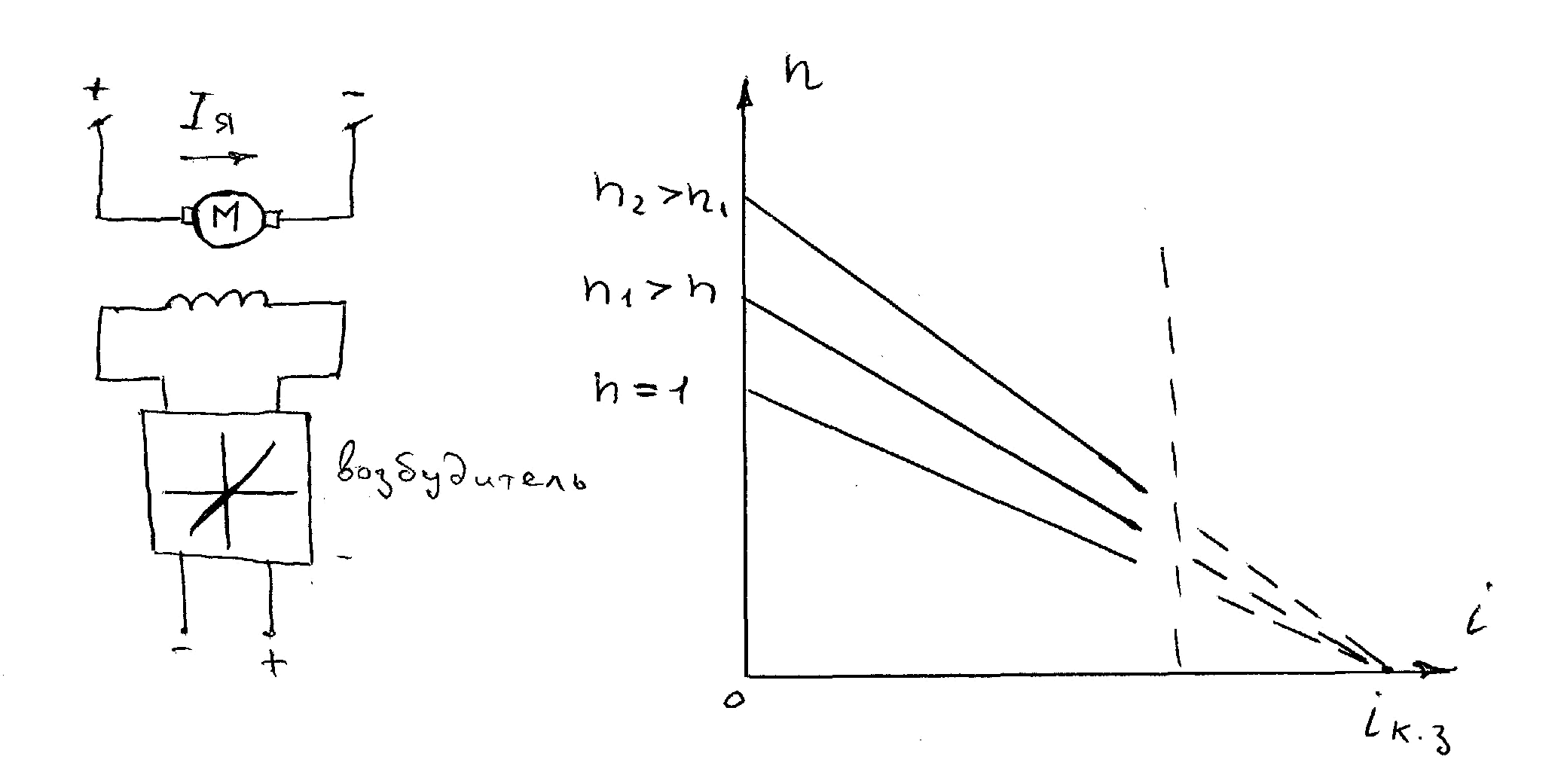
Для крупных ДПТ Iкз=(20-50)Iн о.е., Основной недостаток это регулирование скорости вверх от основной (естественной), Диапазон регулирования D=3-4 ÷1.
Регулирование плавное, относительная простота реализации. Отсутствие дополнительных элементов в якорной цепи, весьма экономичен. Рвоз=(2-5)%Рном.
U=var
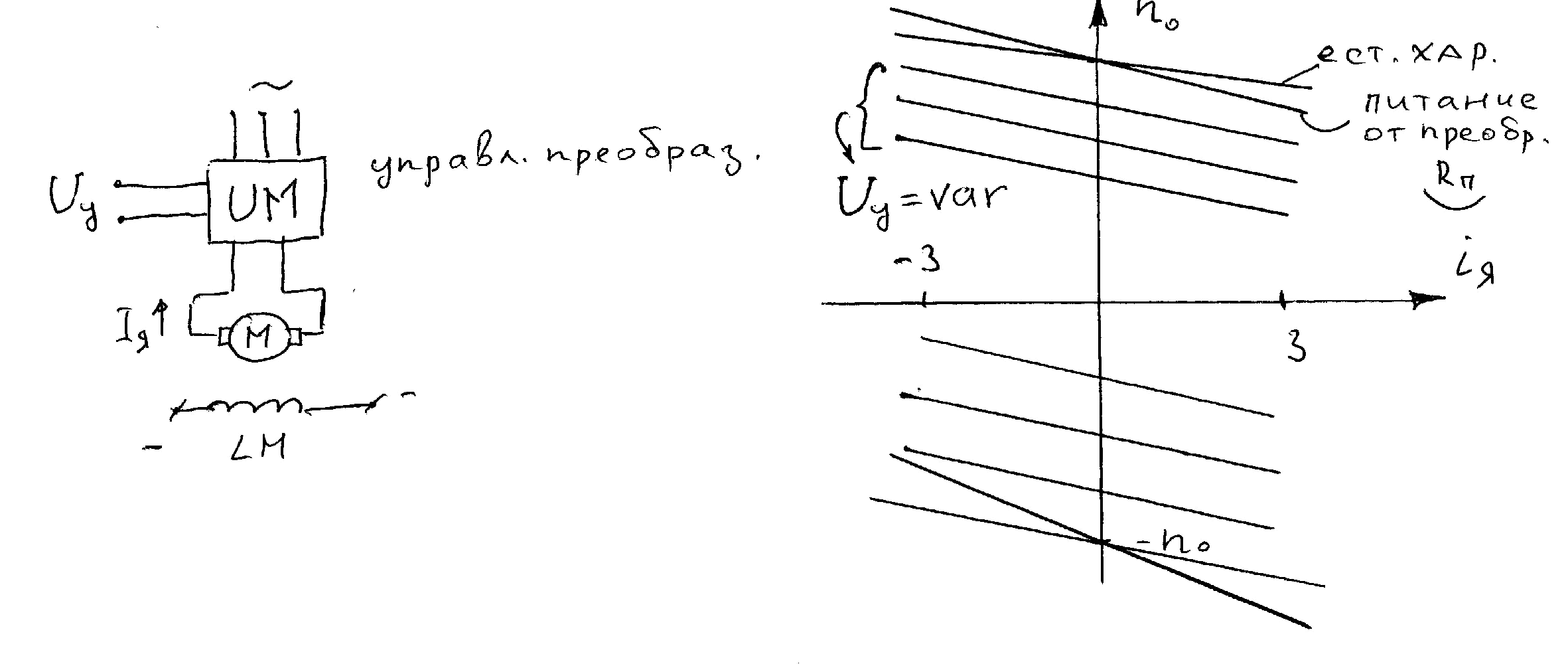 Регулирование
скорости однозонное, вниз от основной,
диапазон регулирования скорости в
разомкнутой системе управления D=8-10÷1,
В замкнутой D=1000÷1.
Регулирование
скорости однозонное, вниз от основной,
диапазон регулирования скорости в
разомкнутой системе управления D=8-10÷1,
В замкнутой D=1000÷1.
Плавное регулирование скорости, экономичность, обеспечивает благоприятные условия протекания ПП. Для ДПТ с НВ не приемлем прямой пуск на Uн!