

Министерство образования РФ
Санкт-Петербургский Государственный Технологический Университет Растительных Полимеров
Заочный факультет.
Курсовой проект.
По предмету: Теория автоматического управления
Тема проекта: “Синтез системы автоматического регулирования массы 1 м2 бумажного полотна”
Выполнил: Студент 4-го курса
Щёголев И.Л.
Специальность :220301 Шифр:095-304
Проверила: Черникова А.В.
Санкт-Петербург
2012
Вариант №1
Бумажная масса после машинного бассейна перед подачей на напорный ящик бумагоделательной машины регулируется расходом оборотной воды, подаваемой к смесительному насосу. Принципиальная схема регулирования изображена на рис.1

Производственное предприятие как система управления состоит из управляющей и управляемой подсистем, связанных между собой каналами передачи информации. Цель управления предприятию в целом задается вышестоящей организацией в виде основных плановых и технико-экономических показателей. для осуществления производственных функций предприятию выделяются трудовые, финансовые и материальные ресурсы. Величина каждого вида ресурсов ограничена. В рамках этих ограничений предприятие может маневрировать ресурсами, распределяя между подразделениями с целью достижения наилучших технико-экономических результатов.
Сложные системы управления строятся, как правило, по иерархическому принципу. В зависимости от структуры предприятия в производственной системе можно выделить два уровня управления. Нижний уровень иерархии состоит из систем управления технологическими процессами, верхний – из системы управления предприятием.
Система управления предприятием относится к организационно-экономическим системам управления. Цель управления заключается в организации совместного функционирования цехов для выпуска готовой продукции в заданном количестве при заданных технико-экономических показателях. Главное отличие организационно-экономических систем от систем управления технологическими процессами состоит в характере объекта управления. Если в системах управления технологическими процессами объектом управления служит отдельный технологический процесс, то в организационно-экономических системах – это коллективы людей, взаимодействующие с технологическим оборудованием, а также осуществляющие технологическую подготовку производств. Основой функционирования организационно-экономических систем являются экономические и социальные законы.
Задачу управления технологическим процессом можно сформулировать следующим образом: найти такое состояние технологического процесса (технологический режим) и такое управляющее воздействие, которые удовлетворяют цели управления при заданных ограничениях. Рассмотрим один из таких процессов – синтез системы автоматического регулирования массы 1 м2 бумажного полотна.
Целью управления регулирования массы 1 м2 бумажного полотна является выпуск определенного вида бумаги и уменьшение брака.
Расход массы бумажного полотна регулируется расходом оборотной воды подаваемый в бак массы. Затем система, в соответствии с заданием, регулирует положение клапана, изменяя тем самым расход оборотной воды.
Необходимая степень разбавления массы для отлива на сетке бумагоделательной машины зависит от веса 1 м2 бумаги, рода волокна и степени помола массы. Наряду с этим, имеет значение также температура массы и конструкция сеточного стола, его длина, мощность отсасывающих ящиков и пр.
Степень разбавления массы изменяется почти в линейной зависимости от концентрации массы, если остальные условия отлива одинаковы. Чем толще бумага (т.е. чем больше вес 1 м2), тем выше должна быть концентрация массы при поступлении на сетку машины, чтобы облегчить процесс обезвоживания при отливе бумажного полотна. При отливе более тонкой бумаги, наоборот, требуется более сильное разбавление массы, чтобы дольше задержать волокна во взвешенном состоянии и улучшить тем самым условия формирования бумажного полотна.
Возмущающим называется всякое воздействие, которое стремится нарушить требуемую функциональную связь между управляющим воздействием и регулируемой переменной. В нашем случае управляющее воздействие – это электродвигатель (исполнительный механизм),который изменяет расход массы 1м2бумажного полотна чтобы обеспечить заданные значения массы 1м2, а возмущающим – является изменение концентрации бумажной массы. Датчик – это элемент системы с помощью которого получают действительные значения регулируемого параметра, т.е. значение расхода массы 1м2 бумажного полотна. Датчик регулятора образует сигнал ошибки. А регулятор – это элемент, который по сигналу ошибки вырабатывает управляющее воздействие в соответствии с законом регулирования.
1.
Целью данного курсового проекта является составление функциональной схемы регулирования процесса «Поддержание требуемого расхода массы – изменение массы 1 м2 бумажного полотна после машинного бассейна».
Объект регулирования – машинный бассейн
Регулируемая величина – масса 1 м2 бумажного полотна
Управляющее воздействие – изменение напряжения на электродвигателе
Возмущающее воздействие – изменение концентрации массы – изменение массы 1 м2 бумажного полотна, поступающей в напорный ящик бумагоделательной машины
Функциональная структура системы регулирования:

возмущение
регулируемый
параметр
ТОУ




 U(t)
регулирующее
U(t)
регулирующее
воздействие
Функция измерения регулируемого
параметра
Управление исполнительным механизмом


U(n) регулирующий Токовый унифицирующий
параметр I (t) сигнал
E (n)
Oшибка
регулирования
Расчет управляющего воздействия
Обработка информации

Первичная обработка
Фильтрация
Масштабирование
В работе нам нужно дать оценку свойств каждого элемента системы по их временным и частотным характеристикам. Для этого необходимо:
-
написать уравнения каждого элемента системы по каждому каналу передачи;
-
получить и алгебраическую структуру системы регулирования.
Для этого составим таблицу, в которой опишем наименования и математическое описания элементов системы регулирования, обозначения переменных и т.д.
|
Наименование элементов АСР, их математические модели, параметры. Исходные воздействия и требования к проектируемой системы регулирования |
Обозначение переменных |
Размерность |
Численные данные |
|
1.Объект регулирования . Канал «изменение расхода массы – изменение массы 1 м2 бумажного полотна» Математическая модель объекта
Параметры модели: -коэффициент передачи объекта - постоянная времени объекта -запаздывание по рассматриваемому каналу передачи информации |
ko To τo |
г/м2 кг/с с с |
150 65 30 |
|
2. Измерительное устройство, датчик массы 1 м2, электронный с преобразователем. Математически модель датчика:
параметр модели: -коэффициент передачи датчика |
kd
|
мА г/м2 |
1
|
|
3. регулирующий блок, реализующий ПИ – закон регулирования. Математическая модель регулирующего блока, дискретная модель:
Параметры модели регулирующего блока |
k1
k2 |
|
|
|
4.преобразователь дискретной величины управляющего воздействия в непрерывную – фиксатор нулевого порядка Математическая модель
Параметр модели: период дискретности управления |
Т |
с |
|
|
5. Исполнительное устройство- исполнительный механизм и клапан. Параметр модели: -коэффициент передачи исполнительного устройства |
kиу |
Кг/с % откр. кл. |
0,5
|
|
6.Канал передачи возмущения: «изменение концентрации массы – изменение массы 1 м2 бумажного полотна»
Параметры модели: -коэффициент передачи -постоянная времени -запаздывание |
kв Тв τв |
г/м2 % конц. с с |
0,95
75 30 |
|
7.Типовые входные воздействия: 1.Изменение задающего воздействия Δg(t) = G • 1[ t ] 2.Изменение возмущающего воздействия Δf(t) = F • 1[ t ]
|
G
F |
г/м2
% конц. массы |
+3.0
-2.5 |
|
8.Требования к качеству работыпроектируемой системы: 1.Точность регулирования массы 2.Корреляционная функция, описывающая случайные изменения массы 1м2 при ручном управлении:
Параметры модели: 3.Допустимая погрешность опроса датчика 4.Время регулирования |
ε
β2 α
σдоп. tрег. |
г/м2
г/м2 с |
0,25 0,03
0,55 min |

2.
А
Wf
(p)



Dрег
(z)
Wф
(p)
Wo
(p)
ИУ
g(t) y(t)

![]()









Wd
(p)




Δ g (t) – изменение задающего воздействия (входной сигнал)
Δ f (t) – изменение возмущающего воздействия
y(t) – выходной сигнал
Dрег (z) – регулятор
Wф (p) – формирующий элемент
ИУ – исполнительное устройство
Wo (p) – объект регулирования
Wf (p) – объект канала возмущения
Wd (p) – датчик
Т – период дискретности
3.
Выбор периода дискретности:
В задании указана корреляционная функция, описывающая случайные изменения массы после смесительного насоса при ручном управлении:
![]() = 0,25*е-0,03*τ
= 0,25*е-0,03*τ
Ошибка аппроксимации (замена непрерывного сигнала с датчика на дискретный)зависит от корреляционной функции.
![]()
где σ – дисперсия ошибки
R(О) – значение корреляционной функции при τ = 0;
R(T) – значение корреляционной функции при τ = T (период опроса датчика)
Т - дискретность
|
Т, с. |
R(T) |
R(o)-R(T) |
σ 2 |
|
|
10 |
0,185 |
0,065 |
0,13 |
0,36 |
|
20 |
0,137 |
0,113 |
0,226 |
0,47 |
|
30 |
0,102 |
0,148 |
0,296 |
0,54 |
|
40 |
0,076 |
0,174 |
0,348 |
0,58 |
Так как допустимая погрешность опроса датчика равна 0.55 г/м2, то выбираем период дискретности Т=30 сек.
4.
Представим объект в виде черного ящика и в операторном виде:

- изменение расхода массы 1 м2 бумажного полотна (управляемая величина)
- изменение напряжения на электродвигателе (управляющее воздействие)
- изменение концентрации массы (возмущение)
Модель объекта в виде дифференциального уравнения
![]()
Параметры модели:
Т[с] – постоянная времени, характеризующая инерционность объекта;
К1 [г/м2/кг/с] – коэффициент передачи по каналу управления;
К2 [г/м2/% конц.]– коэффициент передачи по каналу возмущения;
τ [с] – время запаздывания передачи воздействия по каналу возмущения.
Уравнение динамики объекта является линейным, поэтому применив принцип суперпозиции, можно записать его в виде двух уравнений по каждому каналу передачи воздействий в отдельности.
Уравнение по каналу управления
![]()
по каналу возмущения:
![]()
Модель объекта в операторной форме может быть получена, если применить преобразование Лапласа к дифференциальному уравнению при нулевых начальных условиях. Отсюда передаточная функция по каналу управления:
![]()
апериодическое звено 1-го порядка с запаздыванием
Передаточная функция по каналу возмущения:
![]()
апериодическое звено 1-го порядка с запаздыванием
5.
Найдем переходную и весовую функции объекта регулирования по каналу управления. Переходная функция h(t) определяется как переходный процесс на входе звена при подаче на его вход единичное ступенчатое воздействие 1[t] при нулевых начальных условиях. Это воздействие имеет ту же размерность, что и физическая величина на входе звена. Поэтому, чтобы получить переходную функцию звена, нужно изменить его входной сигнал на одну единицу.
Переходная функция I-го звена с запаздыванием определяется выражением
![]()
Весовая функция w (t) представляет собой переходный процесс на выходе звена на единичную функцию δ(t) при нулевых начальных условиях. Единичная импульсная функция является производной от единичной ступенчатой функции δ[t ]=1'[t], поэтому размерность δ[t ] равна размерности физической величины на входе звена, деленной на время. Весовая функция w(t) определяется дифференцированием выражения
![]()
Составим таблицу
|
t |
h(t) |
W(t) |
|
t |
h(t) |
0 |
|
0 |
0 |
2,307692 |
|
30 |
0 |
1,454569 |
|
60 |
0 |
0,916834 |
|
90 |
90,40579 |
0,577893 |
|
120 |
112,437 |
0,364253 |
|
150 |
126,3235 |
0,229594 |
|
180 |
135,0764 |
0,144716 |
|
210 |
140,5935 |
0,091216 |
|
240 |
144,0709 |
0,057495 |
|
270 |
146,2628 |
0,03624 |
|
300 |
147,6444 |
0,022842 |
|
330 |
148,5152 |
0,014398 |
|
360 |
149,0641 |
|
|
390 |
149,4101 |
|
|
420 |
149,6282 |
|
|
450 |
149,7656 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
По данным таблицы построим переходную h(t) и весовую W(t) функции.
h(t)
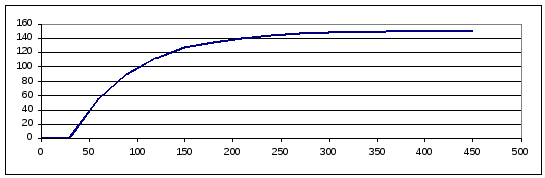
W(t)

Выражения частотных характеристик объекта по каналу могут быть получены из выражения частотной передаточной функции:
 ,где
,где
![]() - АЧХ объекта
- АЧХ объекта
![]() - ФЧХ объекта.
- ФЧХ объекта.
Если К0<0,
то выражение ФЧХ запишется в виде:
![]()
Частота ωпр., определяющая полосу частот пропускания объекта, найдется из условия
![]() в нашем случае
в нашем случае
 тогда
получаем wпр=
1/T=1/65=0,015
тогда
получаем wпр=
1/T=1/65=0,015
Составим таблицу и по полученным данным построим АЧХ и ФЧХ
|
w |
АЧХ |
ФЧХ |
|
0 |
150 |
0 |
|
0,02 |
91,45661 |
-1,45552 |
|
0,04 |
53,84686 |
-2,07968 |
|
0,06 |
37,2563 |
-2,38349 |
|
0,08 |
28,32711 |
-2,55681 |
|
0,1 |
22,80858 |
-2,66719 |
|
0,12 |
19,07465 |
-2,74314 |
|
0,14 |
16,38488 |
-2,7984 |
|
0,16 |
14,35686 |
-2,84034 |
|
0,18 |
12,77394 |
-2,87322 |
|
0,2 |
11,50447 |
-2,89967 |
|
0,22 |
10,46396 |
-2,9214 |
|
0,24 |
9,59569 |
-2,93957 |
|
w |
АЧХ |
ФЧХ |
|
0,26 |
8,860242 |
-2,95498 |
|
0,28 |
8,229346 |
-2,96821 |
|
0,3 |
7,682213 |
-2,9797 |
|
0,32 |
7,203219 |
-2,98976 |
|
0,34 |
6,780393 |
-2,99865 |
|
0,36 |
6,404411 |
-3,00655 |
|
0,38 |
6,067904 |
-3,01363 |
|
0,4 |
5,764968 |
-3,02001 |
|
0,42 |
5,490823 |
-3,02578 |
|
0,44 |
5,241552 |
-3,03103 |
|
0,46 |
5,013919 |
-3,03582 |
|
0,48 |
4,805225 |
-3,04022 |
АЧХ

ФЧХ

Амплитудно-фазовую
частотную характеристику объекта
(АФЧХ) можно построить по выражению
 ,
если записать его в виде : Wf
(jw)
= U(w)+jV
(w)
,
если записать его в виде : Wf
(jw)
= U(w)+jV
(w)
![]()
![]()
Составим таблицу и по полученным данным построим АФЧХ
|
w |
U(w) |
V(w) |
|
0 |
150 |
0 |
|
0,01 |
80,483131 |
-96,642066 |
|
0,02 |
5,0911003 |
-91,314801 |
|
0,03 |
-28,293936 |
-62,325862 |
|
0,04 |
-39,837833 |
-36,227498 |
|
0,05 |
-41,138874 |
-15,922909 |
|
0,06 |
-37,247451 |
-0,8120863 |
|
0,07 |
-30,635517 |
9,9101975 |
|
0,08 |
-22,73432 |
16,898988 |
|
0,09 |
-14,497457 |
20,703139 |
|
0,1 |
-6,6148181 |
21,828316 |
|
0,11 |
0,4040537 |
20,77287 |
|
0,12 |
6,197205 |
18,039868 |
|
0,13 |
10,53629 |
14,133271 |
|
0,14 |
13,317764 |
9,5447129 |
|
0,15 |
14,553217 |
4,73565 |
|
0,16 |
14,356373 |
0,1184159 |
|
0,17 |
12,926094 |
-3,9611373 |
|
0,18 |
10,525822 |
-7,2374452 |
|
0,19 |
7,4604822 |
-9,5341243 |
|
0,2 |
4,0522692 |
-10,767175 |
|
0,21 |
0,6168631 |
-10,942266 |
|
0,22 |
-2,5583792 |
-10,146382 |
|
0,23 |
-5,23287 |
-8,5345575 |
|
0,24 |
-7,226756 |
-6,3127855 |
|
0,25 |
-8,4296332 |
-3,7184573 |
|
0,26 |
-8,8036498 |
-0,9998203 |
|
0,27 |
-8,3810537 |
1,604021 |
|
0,28 |
-7,2566468 |
3,8811347 |
|
0,29 |
-5,575967 |
5,6615931 |
|
0,3 |
-3,5203045 |
6,8281659 |
|
0,31 |
-1,2898483 |
7,3222804 |
|
w |
U(w) |
V(w) |
|
0,32 |
0,9136528 |
7,14504 |
|
0,33 |
2,9033524 |
6,3534744 |
|
0,34 |
4,5216582 |
5,0525568 |
|
0,35 |
5,6514523 |
3,3838238 |
|
0,36 |
6,2234517 |
1,511664 |
|
0,37 |
6,2193102 |
-0,3915216 |
|
0,38 |
5,6704181 |
-2,1600491 |
|
0,39 |
4,6526994 |
-3,6483926 |
|
0,4 |
3,2780096 |
-4,7423109 |
|
0,41 |
1,6829881 |
-5,3668632 |
|
0,42 |
0,0163861 |
-5,4907986 |
|
0,43 |
-1,5740266 |
-5,127121 |
|
0,44 |
-2,9538839 |
-4,3299468 |
|
0,45 |
-4,0129775 |
-3,188071 |
|
0,46 |
-4,6735264 |
-1,8159116 |
|
0,47 |
-4,8953754 |
-0,3426885 |
|
0,48 |
-4,677816 |
1,0991919 |
|
0,49 |
-4,0580085 |
2,3855463 |
|
0,5 |
-3,1062723 |
3,4106743 |
|
0,51 |
-1,9187553 |
4,0956519 |
|
0,52 |
-0,6081978 |
4,3940369 |
|
0,53 |
0,7063625 |
4,2946007 |
|
0,54 |
1,9100379 |
3,8209661 |
|
0,55 |
2,9018045 |
3,0282899 |
|
0,56 |
3,6026835 |
1,9973756 |
|
0,57 |
3,9617529 |
0,8268047 |
|
0,58 |
3,9595514 |
-0,3761801 |
|
0,59 |
3,6086725 |
-1,5052213 |
|
0,6 |
2,9515919 |
-2,4639978 |
