

Министерство образования и науки Российской Федерации
ФГБОУ ВО «Магнитогорский государственный технический университет им. Г.И. Носова»
Институт энергетики и автоматизированных систем
Кафедра Электроники и микроэлектроники
Лабораторная работа №4
Изучение датчиков углового положения
Выполнил: студент группы АНБ-14-2
Михайлицын А.С.
Проверил: к.т.н. доцент кафедры ЭиМЭ
Евдокимов С.А.
Магнитогорск 2016
1. Цель работы:
1) Изучить режимы работы и основные характеристики инкрементального оптического энкодера, вращающегося трансформатора, работающем в синусно-косинусном режиме и потенциометрического датчика.
2) Овладеть методами экспериментального исследования данных устройств и определения точности преобразования угла поворота в электрический сигнал.
3) Сравнить экспериментальные характеристики с теоретическими и оценить погрешности.
4) Определить сравнительные качества синусных и косинусных обмоток синусно-косинусных трансформаторов.
5) Определить значения погрешностей потенциометрического датчика.
Общие теоретические сведения:
В лабораторной работе исследуются датчики углового положения:
- инкрементальный оптический энкодер TRD-S/SH фирмы Automation Direct;
- вращающийся трансформатор 2,5 Вт;
- потенциометрический датчик ПТП-11-5;
2. Результаты выполнения лабораторной работы
1) Снятие и построение передаточной характеристики инкрементального оптического энкодера.
Таблица 1 – Результаты измерения числа импульсов
|
α , град |
0 |
45 |
90 |
135 |
180 |
225 |
270 |
315 |
360 |
|
N – число импульсов |
0 |
245 |
497 |
871 |
992 |
1280 |
1502 |
1765 |
1986 |
Так как в результате измерений было снято несколько точек, то разрешающая способность оптического энкодера N0 была определена как среднее арифметическое частного по формуле N0 = N/α.
Результаты расчетов: N0 = 5,64 (имп./град.)
Была построена передаточная характеристика N = f(a), представленная на рисунке 1.

Рисунок 1 – Передаточная характеристика N = f(a)
2) Снятие и построение характеристики холостого хода для синусной обмотки.
В результате выполнения задания были получены экспериментальные данные, которые представлены в таблице 2.
Таблица 2 – Результаты измерений синусной обмотки
|
α, град. |
0 |
45 |
90 |
135 |
180 |
225 |
270 |
315 |
360 |
|
Usin, B (по часовой) |
4,3 |
0,43 |
4,64 |
6,12 |
4,04 |
0,11 |
4,45 |
6,09 |
4,35 |
|
Usin, B (против часовой) |
4 |
0,33 |
4,41 |
6,06 |
4,05 |
0,03 |
4,41 |
6,08 |
4,35 |
Далее по полученным данным была построена зависимость Usin = f(a), представленная на рисунке 2.

Рисунок 2 – Зависимость Usin = f(a)
3) Снятие и построение характеристики холостого хода для косинусной обмотки.
В результате выполнения задания были получены экспериментальные данные, которые представлены в таблице 3.
Таблица 3 – Результаты измерений косинусной обмотки
|
α, град. |
0 |
45 |
90 |
135 |
180 |
225 |
270 |
315 |
360 |
|
Ucos, B (по часовой) |
4,43 |
6,01 |
4,27 |
0 |
4,31 |
6,12 |
4,05 |
0 |
4,1 |
|
Ucos, B (против часовой) |
4,53 |
0,72 |
3,7 |
6,15 |
4,8 |
0,75 |
3,4 |
5,9 |
4,95 |
Далее по полученным данным была построена зависимость Ucos = f(a), представленная на рисунке 3.

Рисунок 3 – Зависимость Ucos = f(a)
4) Снятие характеристик синусной обмотки при нагрузке.
В результате выполнения задания были получены экспериментальные данные, которые представлены в таблице 4.
Таблица 4 – Результаты измерений синусной обмотки при нагрузке
|
Rn=470 Ом |
α, град. |
0 |
45 |
90 |
135 |
180 |
225 |
270 |
315 |
360 |
|
Usin, В |
5,03 |
5,95 |
3,44 |
0,91 |
4,95 |
6,02 |
3,64 |
0,55 |
4,87 |
|
|
Rn=1000 Ом |
α, град. |
0 |
45 |
90 |
135 |
180 |
225 |
270 |
315 |
360 |
|
Usin, В |
3,71 |
0,67 |
4,52 |
6 |
3,7 |
0,39 |
4,55 |
6,03 |
4,28 |
Далее по формулам (1), (2) и (3) рассчитываются U’sin, ∆Uвых и ∆Uвых%:
U’sin = Usin/sina (1)
∆Uвых = Usin - U’sin (2)
∆Uвых% = 100*∆Uвых/Usin max (3)
Результаты расчетов при нагрузке 470 Ом представлены в таблице 5.
Таблица 5 – Результаты расчетов при нагрузке 470 Ом
|
α, град. |
0 |
45 |
90 |
135 |
180 |
225 |
270 |
315 |
360 |
|
Usin, В |
5,03 |
5,95 |
3,44 |
0,91 |
4,95 |
6,02 |
3,64 |
0,55 |
4,87 |
|
U'sin, В |
- |
8,41 |
3,44 |
1,28 |
- |
-8,51 |
-3,64 |
-0,78 |
- |
|
∆Uвых, В |
- |
-2,46 |
0 |
-0,37 |
- |
14,53 |
7,28 |
1,32 |
- |
|
∆Uвых%, % |
- |
-40,94 |
0 |
-6,26 |
- |
241,42 |
120,93 |
22,05 |
- |
Далее по полученным расчетам на одном графике (рисунок 4) были построены характеристики ∆Uвых%, Usin, U’sin, и ∆Uвых.

Рисунок 4 – Характеристики ∆Uвых%, Usin, U’sin, и ∆Uвых
Результаты расчетов при нагрузке в 1000 Ом представлены в таблице 6.
Таблица 6 – Результаты расчетов при нагрузке в 1000 Ом
|
α, град. |
0 |
45 |
90 |
135 |
180 |
225 |
270 |
315 |
360 |
|
Usin, В |
3,73 |
0,63 |
4,57 |
6,00 |
3,80 |
0,32 |
4,65 |
6,05 |
4,18 |
|
U'sin, В |
- |
0,94 |
4,52 |
8,48 |
- |
-0,55 |
-4,55 |
-8,52 |
- |
|
∆Uвых, В |
- |
-0,27 |
0 |
-2,48 |
- |
0,94 |
9,1 |
14,55 |
- |
|
∆Uвых%, % |
- |
-4,60 |
0 |
-41,2 |
- |
15,61 |
150,91 |
241,42 |
- |
Далее по полученным расчетам на одном графике (рисунок 5) были построены характеристики ∆Uвых%, Usin, U’sin, и ∆Uвых.

Рисунок 5 – Характеристики ∆Uвых%, Usin, U’sin, и ∆Uвых
5) Снятие характеристик косинусной обмотки при нагрузке.
В результате выполнения задания были получены экспериментальные данные, которые представлены в таблице 7.
Таблица 7 – Результаты измерений косинусной обмотки при нагрузке
|
Rn=470 Ом |
α, град. |
0 |
45 |
90 |
135 |
180 |
225 |
270 |
315 |
360 |
|
Usin, В |
4,31 |
5,84 |
4,25 |
0,15 |
4,31 |
5,75 |
4,18 |
0,19 |
3,64 |
|
|
Rn=1000 Ом |
α, град. |
0 |
45 |
90 |
135 |
180 |
225 |
270 |
315 |
360 |
|
Usin, В |
3,68 |
6,1 |
4,9 |
1,1 |
3,45 |
5,95 |
4,91 |
1,11 |
3,21 |
Далее по формулам (1), (2), и (3), подставив соответствующие значения измерения косинусной обмотки, были получены расчетные значения U’cos, ∆Uвых и ∆Uвых%.
Результаты расчетов при нагрузке 470 Ом представлены в таблице 8.
Таблица 8 – Результаты расчетов при нагрузке 470 Ом
|
α, град. |
0 |
45 |
90 |
135 |
180 |
225 |
270 |
315 |
360 |
|
Ucos |
4,31 |
5,84 |
4,25 |
0,15 |
4,31 |
5,75 |
4,18 |
0,19 |
3,64 |
|
U'cos |
4,31 |
8,26 |
- |
-0,21 |
-4,31 |
-8,13 |
- |
0,27 |
3,64 |
|
∆Uвых |
0 |
-2,42 |
- |
0,36 |
8,62 |
13,88 |
- |
-0,078 |
0 |
|
∆Uвых% |
0 |
-41,42 |
- |
6,20 |
147,60 |
237,7 |
- |
-1,34 |
0 |
Далее по полученным расчетам на одном графике (рисунок 6) были построены характеристики ∆Uвых%, Ucos, U’cos, и ∆Uвых.

Рисунок 6 – Характеристики ∆Uвых%, Ucos, U’cos, и ∆Uвых
Результаты расчетов при нагрузке 1000 Ом представлены в таблице 9.
Таблица 9 – Результаты расчетов при нагрузке 1000 Ом
|
α, град. |
0 |
45 |
90 |
135 |
180 |
225 |
270 |
315 |
360 |
|
Ucos |
3,68 |
6,1 |
4,9 |
1,1 |
3,45 |
5,95 |
4,91 |
1,11 |
3,21 |
|
U'cos |
3,68 |
8,62 |
- |
-1,55 |
-3,45 |
-8,41 |
- |
1,56 |
3,21 |
|
∆Uвых |
0 |
-2,52 |
- |
2,65 |
6,9 |
14,36 |
- |
-0,45 |
0 |
|
∆Uвых% |
0 |
-41,42 |
- |
43,53 |
113,11 |
235,48 |
- |
-7,53 |
0 |
Далее по полученным расчетам на одном графике (рисунок 7) были построены характеристики ∆Uвых%, Ucos, U’cos, и ∆Uвых.

Рисунок 7 – Характеристики ∆Uвых%, Ucos, U’cos, и ∆Uвых
6) Снятие характеристик ВТ при первичном симметрировании.
В ходе выполнения задания была снята характеристика Usin,Ucos= f(a), а также произведены вычисления по формулам (1), (2), (3).
Результаты измерений и расчетов были сведены в таблицу 10.
Таблица 10 – Результаты измерения и расчетов Usin,Ucos = f(a)
|
α, град. |
0 |
45 |
90 |
135 |
180 |
225 |
270 |
315 |
360 |
|
Ucos, В |
3,27 |
5,74 |
5,25 |
1,62 |
2,89 |
5,86 |
5,39 |
1,86 |
2,7 |
|
Usin, В |
5,12 |
1,32 |
2,85 |
5,78 |
5,27 |
1,72 |
2,84 |
5,79 |
5,43 |
|
U'cos, В |
3,27 |
8,12 |
- |
-2,29 |
-2,89 |
-8,28 |
- |
2,63 |
2,7 |
|
U'sin, В |
- |
1,86 |
2,85 |
8,17 |
- |
-2,43 |
-2,84 |
-8,18 |
- |
|
∆Uвых, В |
0 |
-2,37 |
- |
3,91 |
5,78 |
14,14 |
- |
-0,77 |
0 |
7) Снятие характеристик ВТ при вторичном симметрировании.
В ходе выполнения задания была снята характеристика Usin,Ucos= f(a) при нагрузке, а также произведены вычисления по формулам (1), (2), (3).
Результаты измерений и расчетов были сведены в таблицу 11.
Таблица 11 – Результаты измерения и расчетов Usin,Ucos = f(a) при нагрузке
|
Rn=470 Om |
α, град. |
0 |
45 |
90 |
135 |
180 |
225 |
270 |
315 |
360 |
|
Ucos |
2,55 |
5,46 |
5,4 |
2,21 |
2,39 |
5,38 |
5,45 |
2,39 |
2 |
|
|
Usin |
5,24 |
1,91 |
2,39 |
5,56 |
5,43 |
2,21 |
2,27 |
5,75 |
5,65 |
|
|
U'cos |
2,55 |
7,72 |
- |
-3,12 |
-2,39 |
-7,60 |
- |
3,37 |
2 |
|
|
U'sin |
- |
2,7 |
2,39 |
7,86 |
- |
-3,12 |
-2,27 |
-8,13 |
- |
|
|
∆Uвых |
0 |
-2,26 |
- |
5,33 |
4,78 |
12,98 |
- |
-0,98 |
0 |
|
|
Rn=1000 Om |
α, град. |
0 |
45 |
90 |
135 |
180 |
225 |
270 |
315 |
360 |
|
Ucos |
1,44 |
2,09 |
5,54 |
5,65 |
2,69 |
2,01 |
5,77 |
5,9 |
2,94 |
|
|
Usin |
5,9 |
5,62 |
2,47 |
2 |
5,38 |
5,74 |
2,8 |
1,75 |
5,34 |
|
|
U'cos |
1,44 |
2,95 |
- |
-7,99031 |
-2,69 |
-2,84 |
- |
8,34 |
2,94 |
|
|
U'sin |
- |
7,94 |
2,47 |
2,83 |
- |
-8,11 |
-2,8 |
-2,47 |
- |
|
|
∆Uвых |
0 |
-0,86 |
- |
13,64 |
5,38 |
4,85 |
- |
-2,44 |
0 |
Далее, чтобы убедиться в близости полученных характеристик синусоидальным, были построены зависимости Usin, Ucos, ∆Uвых = f(a) при нагрузке 470 Ом и 1000 Ом, которые представлены на рисунках 8 и 9 соответственно.
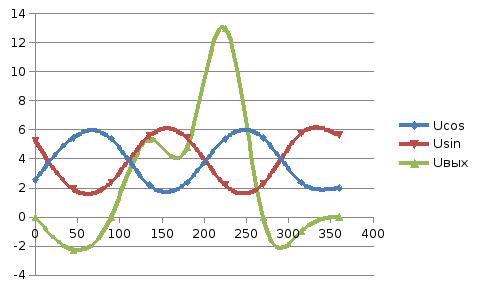
Рисунок 8 – Характеристика Usin,Ucos ∆Uвых = f(a) при нагрузке 470 Ом

Рисунок 9 – Характеристика Usin,Ucos ∆Uвых = f(a) при нагрузке 1000 Ом
8) Снятие и построение характеристики холостого хода потенциометрического датчика угла поворота.
В ходе лабораторной работы была снята экспериментальная характеристика датчика в режиме холостого хода. Результаты измерений представлены в таблице 12.
Таблица 12 – Характеристика датчика в режиме холостого хода
|
|
a,град. |
0 |
45 |
90 |
135 |
180 |
225 |
270 |
315 |
360 |
|
Uвых, В |
По часовой стрелке |
0 |
0,13 |
0,18 |
0,22 |
0,33 |
0,49 |
0,89 |
1,21 |
0 |
|
Против часовой стрелки |
0 |
0,29 |
0,47 |
0,51 |
0,56 |
0,68 |
0,72 |
0,89 |
0 |
Далее по экспериментальным данным была построена зависимость Uвых0 = f(a), которая представлена на рисунке 10 и 11.

Рисунок 10 – Зависимость Uвых0 = f(a) при направлении по часовой стрелке

Рисунок 11 – Зависимость Uвых0 = f(a) при направлении против часовой стрелки
9) Снятие и построение характеристики потенциометрического датчика угла поворота под нагрузкой.
В ходе выполнения задания были сняты характеристики датчика под нагрузкой, которые представлены в таблице 13.
Таблица 13 – Результаты снятия характеристики под нагрузкой
|
|
|
a,град |
0 |
45 |
90 |
135 |
180 |
225 |
270 |
315 |
360 |
|
R = 1 |
Uвых., В |
По часовой стрелке |
0 |
0,32 |
0,47 |
0,64 |
0,69 |
1,19 |
2,65 |
2,03 |
0 |
|
Против часовой стрелки |
0 |
0,39 |
0,41 |
0,57 |
0,79 |
1,15 |
1,78 |
4,09 |
0 |
||
|
R = 2 |
По часовой стрелке |
0 |
0,56 |
0,8 |
1,05 |
1,41 |
1,93 |
1,96 |
3,01 |
0 |
|
|
Против часовой стрелки |
0 |
0,55 |
0,78 |
1,05 |
1,4 |
1,94 |
1,95 |
2,93 |
0 |
||
|
R = 3 |
По часовой стрелке |
0 |
0,77 |
1,13 |
1,52 |
2,01 |
2,61 |
2,67 |
3,68 |
0 |
|
|
Против часовой стрелки |
0 |
0,77 |
1,54 |
2,01 |
2,68 |
2,74 |
2,78 |
3,73 |
0 |
||
|
R = 4 |
По часовой стрелке |
0 |
0,96 |
1,38 |
1,88 |
2,47 |
3,12 |
3,2 |
4 |
0 |
|
|
Против часовой стрелки |
0 |
0,61 |
1,2 |
1,63 |
2,2 |
2,8 |
3,6 |
4,61 |
0 |
||
|
R= 5 |
По часовой стрелке |
0 |
0,7 |
1,28 |
1,85 |
2,45 |
3,06 |
3,78 |
4,62 |
0 |
|
|
Против часовой стрелки |
0 |
0,73 |
1,28 |
1,85 |
2,43 |
3,08 |
3,8 |
4,6 |
0 |
||
|
R = 6 |
По часовой стрелке |
0 |
0,58 |
1,19 |
1,8 |
2,4 |
3,05 |
3,82 |
4,4 |
0 |
|
|
Против часовой стрелки |
0 |
0,52 |
1,18 |
1,83 |
2,5 |
3 |
3,67 |
4,34 |
0 |
||
|
R = 7 |
По часовой стрелке |
0 |
0,57 |
1,23 |
1,86 |
2,48 |
3,13 |
3,84 |
4,48 |
0 |
|
|
Против часовой стрелки |
0 |
0,59 |
1,23 |
1,84 |
2,47 |
3,15 |
3,78 |
4,54 |
0 |
Далее по экспериментальным данным были построены зависимости Uвых. = f(a) на тех же графиках, что и зависимости Uвых0 = f(a). Результаты построений представлены на рисунках 12 и 13.

Рисунок 12 – Зависимость Uвых = f(a) при направлении по часовой стрелке

Рисунок 13 – Зависимость Uвых = f(a) при направлении против часовой стрелки