

2 контрольная 2 вариант
.pdf1.«Установившиеся режимы в САУ».
Считая коэффициенты Ки, Кп неизвестными, исследовать установившийся режим заданной системы. Схему системы взять из контрольной работы №1 п.2.3.
-определить величину статической ошибки в системе еуст;
-определить значение Ки, обеспечивающее скоростную ошибку еуст < 0,01 (1% ) для линейно нарастающего Uзд = a t.
Остальные параметры системы приведены в таблице
Вариант |
2 |
а |
0,2 |
К1 |
4 |
К2 |
0,2 |
К3 |
0,2 |
К4 |
2 |
То |
5 |
Т1 |
0,7 |
Т2 |
0,2 |
схема |
2 |
передаточная функцияразомкнутой системы
|
|
|
|
|
|
|
|
|
|
|
|
|
K2 |
|
|
|||
|
Kи |
|
|
K1 |
|
|
|
|
K3 K2 |
|
||||||||
Wraz(p ) |
|
|
|
Kп |
|
|
|
|
|
|
|
|
|
|
|
|
K4 |
|
p |
T1 p 1 |
|
1 |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
K3 K2 p 1 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Wraz(p ) simplify |
|
|
K1 K2 K4 (Kи p Kп) |
|
|
|||||||||||||
p (T1 p |
1) (p K2 K3) |
|
||||||||||||||||
|
|
|
|
|
|
|||||||||||||
Передаточнаяфункция замкнутойсистемыпоуправлению
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K2 |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
Kи |
|
|
|
|
|
K1 |
|
|
|
|
|
|
|
|
|
|
K3 K2 |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
Kп |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
p |
T1 p 1 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K3 K2 p 1 |
|
|
|
|
|
||||||||||||||||||||||||||
Wзу(p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K2 |
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
K1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K3 K2 |
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
Kи |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
1 K4 |
|
Kп |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
p |
T1 p 1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K3 K2 p 1 |
||||||||||||||||||||||||||||
Wзу(p ) simplify |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K1 K2 (Kи p Kп) |
||||||||||||||||||||||||||
|
T1 p |
3 p 2 K2 K3 p K1 K2 K4 Kи K2 K3 T1 p 2 K1 K2 K4 p Kп |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||
Передаточнаяфункция замкнутойсистемыповозмущению |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K3 K2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
p 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Wзf (p ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
K3 K2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K2 |
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
K1 |
|
|
|
|
|
|
|
|
|
|
|
K3 K2 |
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
Kи |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
1 |
K4 |
|
|
|
Kп |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
T1 p |
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K3 K2 p 1 |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
Wзf (p ) simplify |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K2 p (T1 p 1) |
|
|||||||||||||||||||||
|
|
T1 p |
3 p 2 K2 K3 p K1 K2 K4 Kи K2 K3 T1 p 2 K1 K2 K4 p Kп |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||
Передаточнаяфункция замкнутойсистемыпоошибке |
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||
Wзе(p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K2 |
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
K1 |
|
|
|
|
|
|
|
|
|
|
|
|
K3 K2 |
|
|||||||||||||||||||||||||||||||
|
|
|
|
Kи |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
1 |
K4 |
|
|
Kп |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
T1 p 1 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K3 K2 p 1 |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
Wзе(p ) simplify |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p (T1 p 1) (p K2 K3) |
|
||||||||||||||||||||||||||||||
|
T1 p |
3 p 2 K2 K3 p K1 K2 K4 Kи K2 K3 T1 p 2 K1 K2 K4 p Kп |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||

Т.к. в системе присутствует звено с астатизмом 1-го порядка (интегратор), то статическая ошибка данной системы еуст = 0
Для нахождения Ки используем теорему о предельном значении функции.
Продифференцируем передаточную функцию ошибки системы. Затем принимая во внимание, что при стремлении t к бесконечности р стремится к 0, получим в пределе коэффициент скоростной ошибки. Далее, приравнивая коэф. к заданному значению еуст = 0.01, найдем Ки.
Wзе(p) |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|||
|
|
|
K1 K4 |
|
Kп |
|
Kи |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
p |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
p |
|
|
|
|
|||
|
|
|
|
|
K3 (T1 p |
1) |
|
|
|
1 |
|
|
|
|
|
|||||
|
|
|
K2 K3 |
|
|
|
|
|
||||||||||||
F(p ) |
d |
|
|
|
|
|
|
|
|
|
|
|
|
p (T1 p 1) (p K2 K3) |
|
|
|
|||
dp |
|
|
3 |
p |
2 |
K2 K3 p K1 K2 K4 Kи K2 K3 T1 p |
2 |
|
|
|||||||||||
|
|
|
T1 p |
|
|
|
K1 K2 K4 p Kп |
|||||||||||||
F(p) simplify |
|
4000.0K |
и 210000.0p |
2 Kи 102800.0p2 Kп 140000.0p |
3 Kп 205600.0p |
Kи |
|||
|
10.0 p |
400.0 Kи 257.0 p2 175.0 p3 400.0 p Kп 2 |
|
||||||
|
|
|
|
|
|
||||
4000.0 Kи |
a |
|
0.01 solve Kи 0.5 |
|
|
|
|
||
|
|
|
|
|
|||||
(400.0 Kи)2 |
|
|
Kи 0.5 |
|
|
||||
|
|
|
|
||||||
|
|
|
|
|
|
|
|
||
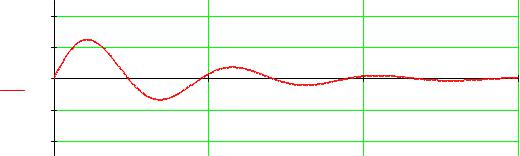
Сделаем проверку, построив переходный процесс реакции системы на линейно возрастающее входное воздействие Операторное изображение задающего воздействия:
U(p ) a p 2
Изменение выходной величины во времени при отработке заданного сигнала:

|
|
|
|
|
invlaplace p |
|
||||
h (t) |
|
|
(U(p)) (Wзу(p)) K4 |
simplify |
|
|||||
|
||||||||||
|
||||||||||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
float 3 |
|
|
|||
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
h(t) |
2 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
||
|
|
t) 1 |
|
|
|
|
|
|
||
|
Uзд( |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|||||
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
10 |
5 |
10 |
15 |
|
|
t |
|
Из графика видно, что система воспроизводит входное воздействие с ошибкой
0,01.
2. "Устойчивость САУ"
2.1. Используя критерий Гурвица найти критическое значение Кп.
Найдем характеристическое уравнение замкнутой системы по управлению.
Wзу(p ) simplify |
|
|
K1 K2 (Kи p Kп) |
|
T1 p |
3 p |
2 K2 K3 p K1 K2 K4 Kи K2 K3 T1 p 2 K1 K2 K4 p Kп |
||
|
D(p ) K1 K2 (Kи p Kп) T1 p 3 p 2 K2 K3 p K1 K2 K4 Kи K2 K3 T1 p 2 K1 K2 K4 p Kп
D(p ) collect p 0.7 p 3 1.028 p 2 (2.4 Kп 0.04) p 0.6
Запишем главный определитель Гурвица, составленный из коэффициентов характеристического уравнения. Используя свойства определителей, устанавливается, что система находится на границе устойчивости при условии положительности всех миноров и равенстве нулю предпоследнего. Обозначим его через М. Приравнивая М к нулю, найдем критический коэф. Кп.
|
1.028 |
0.6 |
0 |
|
|
|
1.028 |
0.6 |
|
|
|
|
|
|
H(Kп) |
|
0.7 |
(2.4 Kп 0.04) |
0 |
|
|
|
|
|
|
|
|||
|
M |
|
0.7 |
1.48 |
|
M |
|
1.1014 |
M submatrix(H(Kп) 0 1 0 1) |
|||||
|
|
|
||||||||||||
|
|
0 |
1.028 |
0.6 |
|
|
|
|
|
|
|
|
|
|
1 (12 Kп |
10.028.6) |
00 |
|
|
50.2.6168 |
|
1.028 |
0.6 |
|
1.1014 |
||
|
1.028 |
|
0 |
|
|
0.7 |
|
|||||
|
|
00..66 |
|
|
|
(2.4 Kп 0.04) |
|
|||||
(2.4 Kп 0.04) |
0 1.44 Kп 0.02 |
|
1.028 |
0.6 |
2.4672Kп 0.3788 |
|||
|
1.028 |
0.6 |
|
|
0.7 |
(2.4 Kп |
0.04) |
|
1.028 |
0 |
0.616 |
|
|
|
|
|
|
|
0 |
0.6 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Дляустойчивостисистемынеобходимоидостаточно, чтобыглавныйопределитель |
|||||||
|
ивсеегодиагональные минорыбылиодногознака скоэффициентомпристаршей |
|||||||
|
производной. ОтсюданайдемзначениеКкр: |
|
|
|
||||
f (Kп) 2.4672 Kп 0.3788 |
|
|
|
|
|
|||
root (f (Kп) Kп) |
0.154 |
Knkr 0.15 |
i |
1 |
|
|
||
d (p Kп) |
0.7 p 3 |
1.028 p 2 |
(2.4 Kп 0.04) p 0.6 |
|
q 0 0.01 11 |
|||
Im(d(i q Knkr )) |
3 |
2 |
1 |
0 |
|
|
||
|
|
|
|
|
|
|||
Im(d(i q 0.5 Knkr)) |
|
|
1 |
|
|
|||
|
|
|
|
|
|
|
|
|
Im(d(i q 2 Knkr )) |
|
|
|
|
|
|
||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
Re(d(i q Knkr)) Re(d(i q 0.5 Knkr )) Re(d(i q 2 Knkr)) |
|
||||
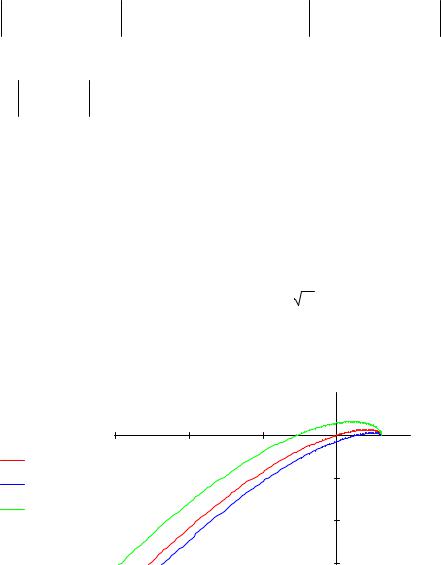
Верхний годографсоответствуетКп=2Ккр, нижний - Кп=0.5Ккр , годограф, - Кп=Ккр |
||||||||
Для устойчивости по критерию Михайлова необходимо, чтобы кривая начиналась при w=0 |
||||||||
на вещественной положительной полуоси с ростом частоты от нуля до бесконечности |
||||||||
обходила последовательно в положительном направлении n квадрантов в комплексной |
||||||||
плоскости, где n-степень характеристического уравнения, в нашем случае =3. |
||||||||
Аналогично предыдущему случаю проверить устойчивость системы по критерию
Найквиста. Для случая устойчивой системы построить ЛАЧХи ЛФЧХ разомкнутой системы, определитьзапасустойчивостипоамплитудеипофазе.
Wraz p Kп simplify |
|
|
|
400.0 p Kп 200.0 |
|
|||
p |
|
175.0 p |
2 |
257.0 p |
|
|
||
|
|
|
|
10.0 |
||||
q 0 0.01 11
|
|
|
0.4 |
|
Im Wraz i q Knkr |
|
|
0.2 |
|
Im Wraz i q 0.5Knkr |
|
|
|
|
Im Wraz i q 2Knkr |
3 |
2 |
1 |
0 |
|
|
|
0.2 |
|
|
|
|
0.4 |
|
|
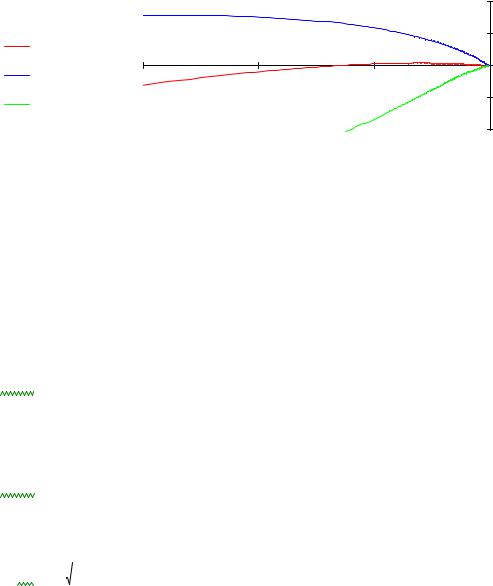
Re Wraz i q Knkr Re Wraz i q 0.5Knkr Re Wraz i q 2Knkr |
|
||
Для того чтобы функция была устойчива, по критерию Найквиста необходимо, чтобы годограф АФЧХ разомкнутой системы не охватывал точку (-1;j0). Как видно из рисунка график при Knkr=0.308 проходят ниже этой точки, что говорит о устойчивости системы.
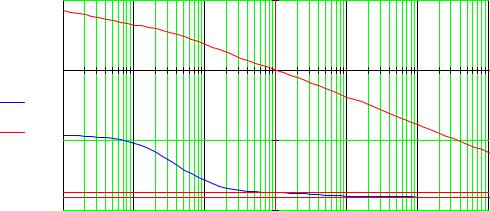
Для случая устойчивой системы построить логарифмическую амплитудночастотную (ЛАЧХ) и фазочастотную (ФЧХ) характеристики разомкнутой системы, определить запас устойчивости по амплитуде и по фазе
|
|
|
|
K1 K2 K4 Kи p K |
|
||||||
Wraz(p) |
|
|
|
|
|
|
п |
|
|
||
p (T1 p 1) (p K2 K3) |
|
||||||||||
Заменим р на w*i |
|
|
|
|
|||||||
Wraz(w) |
|
|
|
|
0.9856 w i 0.8 |
|
|
||||
w i (w i 0.04) (0.7 w i 1) |
|
||||||||||
P(w) Re(Wraz(w)) |
Q(w) Im(Wraz(w)) |
|
|||||||||
|
|
|
|
|
|
||||||
A(w) |
|
|
P(w)2 Q(w)2 |
|
Lg(w) 20 log(A(w)) |
|
|||||
(w) |
180 |
|
|
|
atan(T1 w) |
atan(T2 w) atan(T3 w) |
|
||||
|
|
|
2 |
|
|||||||
|
|
|
|
|
|
|
|
||||
|
|
|
100 |
1 |
|
|
|
10r |
1 10 3 |
0.01 |
0.1 |
1 |
10 |
100 |
1 103 |
r |
|
|
|
|
|
|
|
Lg 10 |
|
|
|
|
|
|
|
|
|
|
100 |
|
|
|
|
|
|
|
|
|
|
|
173 |
|
|
|
200 |
|
|
|
180 |
|
|
|
|
|
|
|
|
|
|
|
10r |
|
|
|
|
Графики ЛАЧХ и ЛФХЧ |
|
|
|
|
|
||
Запас устойчивости по фазе =8 град По амплитуде бесконечен, т.к. график не пересекает -180 град
2 Тема «Переходные процессы в САУ».
Для значения Кп, соответствующего устойчивой системе, построить переходный процесс в системе по управлению и по возмущению.
Определить временные показатели качества процесса регулирования: -установившуюся ошибку (остаточное отклонение) ; -максимальное динамическое отклонение Уmax; -перерегулирование %;
-время регулирования tр; -степень колебательности m; -степень затухания .
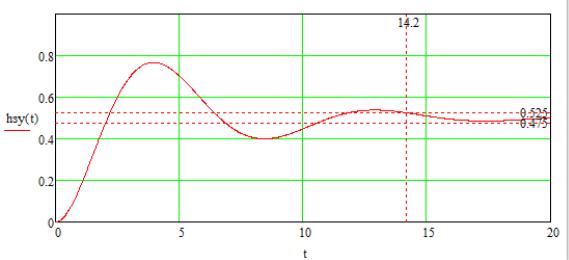
Строим график переходного процесса по управлению
|
|
|
|
|
|
|
|
|
invlaplace p |
|
|
|
|
hзу(t) |
|
Wзу(p) |
|
float 3 |
|
|
|
|
|||||
|
|
|
|
||||||||||
|
|
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
hзу |
|
|
|
|
|
|
|
0.32 p 0.2 |
|
|
invlaplace p |
||
|
|
|
p 0.7 p |
1.042 p 2 |
0.7 p 3 |
|
0.4 |
||||||
|
|
||||||||||||
Определим показатели качества установившуюся ошибку (остаточное отклонение) =0
-максимальное динамическое отклонение Уmax= 0,78 -перерегулирование =56 %
-время регулирования tр=14,2;
-степень колебательности m= 2; -степень затухания =0,18.
Переходная функция по возмущению.
0.4
0.2
hзf (t) |
0 |
10 |
20 |
30 |
|
0.2
0.4
t