

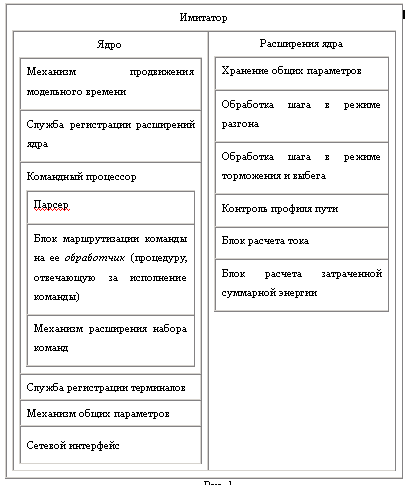
Структурная схема имитатора
.docСтруктурная схема имитатора
Программа расчета оптимальных управлений
позволяет для участка заданной длины с указанным профилем местности и требуемым временем похождения участка рассчитать допустимые управления поездом. А также попутно рассчитать затраченную энергию на прохождение данного участка. Таким образом, программа находит допустимое решение прохождения заданного участка с ограничениями по времени и профилю пути.
Алгоритм работы программы
Алгоритм работы программы строится на базе метода деления отрезка пополам.
Осуществляется двумерная оптимизация нахождения финального значения функции S(n,St,U,ΔV) равному заданному значению S0. Функция S – пройденное поездом расстояние зависит от n – номера текущего переключения «детального» управления (вкл/выкл двигатель, тормоз), St – точки начала торможения, U – используемого управления (середины трубки скоростей) и ΔV - 1/2 ширины трубки изменения скорости.
Последовательными приближениями по методу деления отрезка пополам находится точка St0, U0,ΔV0 такая , что финальное значений функции S(n=N, St=St0, U=U0, ΔV= ΔV0) равняется S0 с точностью до заданной погрешности.
здесь :
N – требуемое число шагов “детальных управлений”;
St0 – найденная точка начала торможения. U0 – найденная середина рубки скоростей; ΔV0 – найденная 0,5 ширины “трубки скоростей”
Обеспечение требуемого времени прохождения участка T осуществляется на основе направленного поиска такого U, которое обеспечивало бы требуемое значение проезда участка с заданной точностью. Кроме того внутри цикла поиска U осуществляется перебор по ΔV с целью минимизации затрат электроэнергии (что тождественно нахождению целого числа “зубцов” пилы изменения скорости)
Таким образом, используемый алгоритм осуществляет вложенный двойной целенаправленный перебор значений St,U с целью нахождения оптимальных значений. Внешний перебор осуществляется по U, внутренний по St.
Также в алгоритме используется специальная процедура сопряжения кривой торможения с кривой движения по участку. Здесь используется линейная аппроксимация этих двух кривых с учетом особенностей структур данных алгоритма, которые подобраны специальным образом для обеспечения наибольшей скорости расчета.