

естественно
.PDF171
Чтобы объяснить различие между наблюдаемыми свойствами нервных стволов и свойствами, которые необходимо привлечь для описания нервной ткани, Шеррингтон ввел понятие синапса, находящегося между рецептором и эффекторной реакцией.
Вмае 1962 г. в Москве состоялось Всесоюзное совещание по философским вопросам физиологии высшей нервной деятельности и психологии. Оно было организовано АН
СССР, АМН СССР, Академией педагогических наук РСФСР
иМинистерствами высшего и среднего специального образования СССР и РСФСР.
Входе развернувшейся на совещании дискуссии обозначились две проблемы, имевшие особенно важное значение. Первая была связана с вопросом о том, сохраняет ли свое значение подход, выдвинутый в свое время И.П. Павловым? Вторая проблема была связана с ответом на старый вопрос: как можно определить термин «сознание»? Мнения участников совещания по обоим этим вопросам разделились.
Входе совещания эта проблема обсуждалась в различных формах: обсуждались вопросы значимости учения И.П. Павлова, целесообразности использования термина «рефлекторная дуга», а также смысла, вкладываемого в понятие «высшая нервная деятельность». С наиболее энергичной критикой Павловской концепции рефлексов выступил Н.А. Бернштейн. Мнение Н.А. Бернштейна о том, что в свете достижений современной науки учение Павлова утрачивает свое значение, было поддержано в выступлениях Н.И. Гращенкова, Л.П. Латаш, И. Фейгенберга, М.М. Бонгард; в неявной форме это мнение поддержал П.К. Анохин. Противоположная точка зрения прямо высказывалась в выступлениях Э.А. Асратяна, Л.Г. Воронина, Ю.П. Фролова, А.И. Долина, Н.А. Шустина, А.А. Зубкова и В.Н. Черниговского.
Важнейшим с точки зрения проблем, интересу ю- щих Бернштейна, вкладом кибернетики могла явиться возможность объяснения (с помощью ее средств и на материалистической основе) процессов «решения задачи действия». С точки зрения кибернетики организм имеет вполне определенную «задачу действия»; Бернштейн говорит о «физиологии активности», чтобы отличить ее от физиологии «простых реак-
172
ций», описываемой в теории рефлексов Павлова. Решение «задачи действия» заслуживает тщательного анализа.
Впротивоположность теории Павлова, которую Н.А. Бернштейн характеризует как исходящую из «уравновешивания организма окружающей средой», он выдвигает новую концепцию, исходящую из необходимости «преодолевания этой среды», направленного «не на сохранение статуса или гомеостаза, а на движение в направлении родовой программы развития и самообеспечения».
Всвоих работах Бернштейн отказался от представления
оразомкнутой рефлекторной дуге Павлова и заменил его идеями сенсорных коррекций (обратная связь) и рефлекторного кольца (рис. 37), за что в 1949 г. подвергся обструкции. По Бернштейну, для выполнения того или другого движения мозг не только посылает определенную "команду" к мышцам, но и получает от периферийных органов чувств сигналы о достигнутых результатах и на их основании дает новые, корректирующие "команды". Таким образом, происходит процесс построения движений, в котором между мозгом и периферийной нервной системой существует не только прямая, но и обратная связь
Концепция уровней построения движения связана с именем Николая Александровича Бернштейна (1896-1966). Полностью она была впервые представлена в книге "О построении движений" (1947).
Бернштейн выдвинул гипотезу, что для построения движений различной сложности "команды" отдаются на иерархически различных уровнях нервной системы (рис.37). При автоматизации движений эта функция передается на более низкий уровень. Уровень А - уровень тонуса (рубро-спинальный уровень палеокинетических регуляций). У человека расположен в спинном мозге и группе красного ядра. Уровень А полностью определяет тонус мышц туловища и шеи (осанка), а также отвечает за возбудимость мышц конечностей. Уровень В - уровень мышечно-суставных увязок (уровень синергии и штампов, таламо-паллидарный уровень). У человека базируется в паллидумах и таламусах. Уровень В обеспечивает следующие

173
Рис. 37. Рефлекторное кольцо по Н,А. Бернштейну Обозначения: 1) эффектор (мотор), работа которого
подлежит регулированию по данному параметру; 2) задающий элемент, вносящий тем или другим путем в систему требуемое значение регулируемого параметра; 3) рецептор, воспринимающий фактические текущие значения параметра и сигнализирующий о них каким-либо способом в прибор сличения; 4) прибор сличения, воспринимающий расхождение фактического и требуемого значений с его величиной и знаком; 5) устройство, перешифровывающее данные прибора сличения в коррекционные импульсы, подаваемые по обратной связи на регулятор; 6) регулятор, управляющий по данному параметру функционированием эффектора.
функции: - обширные мышечные синергии, т.е. способность вести высокослаженные движения всего тела, вовлекающие в согласованную работу многие десятки мышц; - способность стройно и налажено вести движение во времени, обеспечение
174
правильного чередования сокращения мышц и движения конечностей; - способность к штампам, к чеканной повторяемости движений. Уровень С - уровень пространства (пирамид- но-стриальный уровень пространственного поля С). Расположен в стриатуме и пирамидной двигательной системе коры.
Уровень С обеспечивает целевые перемещения в пространстве: локомоции, спортивно-гимнастические перемещения, точные, целенаправленные движения рук и других органов, преодоление сопротивлений, метательные и ударные движения, подражательные движения. Уровень D - уровень действий (теменно-премоторный уровень действий). Базируется в нижних отделах теменной доли и в премоторной зоне. Обеспечивает выполнение действий - целые цепочки последовательных движений, которые все вместе решают ту или другую двигательную задачу. Для уровня D характерна предметность (хотя и не всегда), цепное строение и приспособительная изменчивость действий, доминирование левого полушария. Группа Е - уровни, лежащие выше уровня действийD. Локализация в коре рассеянная. Обеспечивает символические действия (речь и письмо); двигательные цепи, объединенные не предметом, а отвлеченным заданием; движения, изображающие предметное действие; предметные действия, для которых предмет является не непосредственным объектом, а средством для воспроизведения в нем или с его помощью абстрагированных, непредметных соотношений.
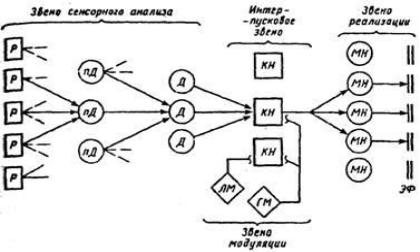
Концептуальная модель организации рефлекторного акта, по Е.Н. Соколову (рис. 38), включает элементы афферентных, центральных и эфферентных звеньев рефлекторной дуги.
Между рецепторными и эффекторными образованиями включены системы нейронов-детекторов, командных нейронов и модулирующих нейронов, а также популяции моторных нейронов.
Нейроны-детекторы, селективно настроенные на определенные параметры раздражителя, кодируют сигналы номером канала и реализуют механизмы сенсорных анализаторов. Особенность командных нейронов состоит в том, что возбуждение системы командных нейронов может запустить цело-
175
Рис. 38. Концептуальная модель организации рефлекторной дуги (по E.H. Соколову, 1986):
Р— рецепторы, пД — предетекторы, Д — детекторы, КН
— командные нейроны, МН — мотонейроны, ЛM — локальномодулирующие нейроны, ГМ — генерализованномодулирующие нейроны, ЭФ — эффекторы
стную поведенческую реакцию или отдельный ее фрагмент. Командные нейроны характеризуются высоким порогом генерации спайковой активности, что обусловливает пороговый уровень запуска соответствующей им рефлекторной реакции. Системы командных нейронов, запускающие различные рефлекторные акты, могут иметь разные пороги возбуждения. Набор нейронов-детекторов, подключенных к командному нейрону, определяет его рефлексогенную зону, а популяция мотонейронов, составляющих мишень аксонных синапсов командного нейрона, определяет его моторную программу. Спайковая активность командного нейрона возбуждает пул связанных с ними мотонейронов и приводит к запуску локального рефлекторного фрагмента.
Модулирующие нейроны составляют особый класс элементов в структуре рефлекторной дуги. Они получают сигналы из внешней среды и внутренних органов, но выполняют функцию регуляции тонуса рефлекторной деятельности мозга. Специальным механизмом регуляции возбудимости являются нейроны модулирующей (активирующей и инактивирующей) берут на себя функцию контроля и управления деятельностью командных нейронов следующего нисходящего уровня, кото-
176
рые запускают комплексы движений.
Выходные (командные) нейроны двигательной коры запускают дискретные двигательные акты через вовлечение в реакцию популяций моторных нейронов стволовых и спинальных уровней. Такая иерархическая организация двигательных систем управления и запуска реакций «сверху вниз» облегчает реализацию сложных программ движений. Принцип системной организации командных нейронов позволяет при ограниченном наборе моторных элементов реализовать сложные аккорды движений.
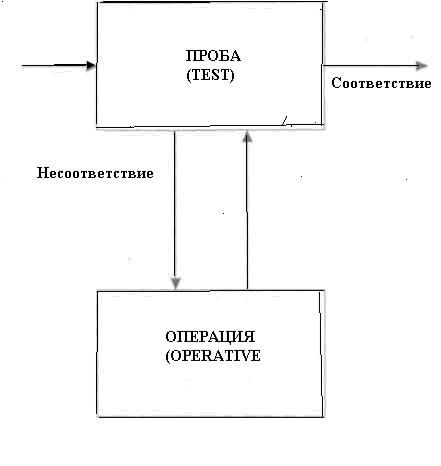
Дж.Миллер, Е.Галантер, К.Прибрам (2000) выдвигают «кибернетическую гипотезу». Согласно этой гипотезе, основным элементом построения нервной системы является петля обратной связи (см. главу 3.5). Идея петли обратной связи была использована Дж.Миллером, Е.Галантером, К.Прибрамом (2000) в развитии представления о том, что нервный механизм, участвующий в рефлекторном акте, не может быть изображен как простая рефлекторная дуга или даже как цепь связей между стимулом и реакцией. Действие возбуждается «несоответствием» между состоянием организма и состоянием, которое опробуется. Действие сохраняется до тех пор, пока несоответствие (то есть проксимальный стимул) не устраняется. Общий характер рефлекторного акта, таким образом, заключается в опробовании воздействующей энергии определенными критериями, установленными в организме, в возникновении реакции, если результат пробы показывает наличие несоответствия (рассогласования), и в продолжение реакции до тех пор, пока это несоответствие не исчезает. Когда это состояние наступает, рефлекс аннулируется (рис.39). Следовательно, существует «обратная связь», идущая от результата действия к фазе опробования; мы обнаруживаем здесь возвратную петлю. Простейший вид схемы, представляющей эту концепцию рефлекторного действия в противоположность классической рефлекторной дуге, будет выглядеть как показано на рис. 30.
Развитие математической теории сервомеханизмов, соединенное с психологическими представлениями о гомеостатических механизмах, вызвало широкое обсуждение тех приспособлений, которые близко напоминают рис. 39. Этот ход мыс-
177
лей, таким образом, имеет в своей основе широко известные положения.
Вначале подобные высказывания казались необычными. Однако, пораздумав немного, психологи поняли, что эти целенаправленные машины хорошо им знакомы, хотя язык, которым о них говорили, и был несколько нов. Еще в 1896 году фи- лософ-психолог Джон Дьюи дал детальное описание сервомеханизма, необходимого для того, чтобы протянуть руку к горящей свече, а затем отдернуть ее. «Дело в том,— говорил он,— что стимул и реакция являются не отличительными признаками существования, а телеологическими признаками, то есть определениями выполняемой функции или роли по отношению к достижению или сохранению завершающей фазы».
Дж.Миллер, Е.Галантер, К.Прибрам (2000) вводят понятие плана и Образа.
Рис. 39. Единица Т-О-Т-Е (Test-Operate-Test-Exit).
План. «План — это всякий иерархически построенный
178
процесс в организме, способный контролировать порядок, в котором должна совершаться какая-либо последовательность операций… Для организма План в основном представляет собой то же самое, что и программа для математической машины, в особенности, если эта программа имеет иерархический характер, описанный выше».
Выполнение Плана не обязательно должно выражаться во внешнем действии — в особенности у человека; можно, повидимому, считать справедливым, что наряду с Планами, руководящими действиями, существуют Планы для сбора или переработки информации. Хотя это фактически не является необходимым, мы интуитивно предполагаем, что одновременно может выполняться только один План, хотя возможно довольно быстрое чередование Планов. Организмможет хранить много других Планов, кроме выполняемого им в данный момент.
Образ. «Образ—это все накопленные и организованные знания организма о себе самом и о мире, в котором он существует. Конечно, образ заключает в себе нечто гораздо большее, чем картины. Употребляя этот термин, мы имеем в виду в основном тот же вид представления, которого требовали другие сторонники познавательной теории. Оно включает все, что приобрел организм,—его оценки наряду с фактами,— организованное при помощи тех понятий, образов или отношений, которые он смог выработать».
3.5. Общая теория систем и механизмы управления в ЦНС. Кибернетика.
Современный этап развития науки характеризуется разработкой алгоритмов анализа деятельности сложных многоуровневых систем, к которым относится организм (животных и человека).
На современном этапе развития науки главным предметом её исследования являются не материальные объекты, как таковые, а связи и отношения, формирующие системы окружающего нас мира, нашей объективной реальности (Монахов А.А., Бочкарев В.К, Никифоров А.И., 1983).
Направление науки, в пределах которой получили
179
развитие исследования общей теории систем (ОТС), ставящие свой целью анализ функционирования сложных систем в настоящее время называется также "теория систем", "системный подход", "системный анализ".
Теория систем - термин введенный в 30-е годы XX века Л.фон Берталанфи (Берталанфи Л. Фон, 1962, 1969, 1972)..Основным новым понятием, введенным Берталанфи было понятие открытой системы
Системный анализ в настоящее время признается наиболее конструктивным из направлений системных исследований. Этот термин впервые появился в работах корпорации RAND в связи с разработкой задач военного управления.
Идейную сущность системного подхода достаточно полно выразил Сент-Дьерди (1964): «Мы действительно приблизимся к пониманию жизни, когда все структуры и функции на всех уровнях, от электронного до супрамолекулярного, сольются в одно целое» (Сент-Дьёрди А., 1964).
А.А. Ляпунов (1972) писал, что "теория систем - это кибернетика без математики, а кибернетика - теория систем с применением математического аппарата". Поэтому идеи, изложенные Н.Винером в книге "Кибернетика" (1969) вполне законно можно считать существенным вкладом в фундамент ОТС.
Основу системных исследований составили две исходные теоретические установки (А.А.Крушанов, 2003):
1.Совокупность тесно взаимосвязанных объектов обладает дополнительными свойствами, не наблюдаемыми у той же совокупности объектов в случае их чисто механического соединения, т.е. "аристотелевское положение "целое — больше суммы его частей" до сих ор остается выражением основной системной проблемы" (Берталанфи, фон Л., 1973)
2.Одни и те же системные свойства и структуры могут быть присущи объектам самой разной физической природы - "...Выявляется, что имеются общие для "систем" аспекты, соответствия и изоморфизмы. Последнее — сфера общей теории систем. На практике подобные параллелизмы и изоморфизмы обнаруживаются — иногда совершенно неожиданно — в системах, абсолютно различных во многих других отношениях"
180
(Берталанфи, фон Л., 1973).
В основе формирования кибернетики, как науки также были положены две исходные идеи (А.А.Крушанов, 2003):
1.Идея выделения процессов управления и сопутствую-
щих им сетей связи как нового специфического предмета науки.
2.Идея существования над дисциплинарных закономер-
ностей - "Винер не просто заметил внешнее сходство между животными и машинами. Если бы это было так, он не сделал бы ничего по-настоящему нового, так как линия преемственности такого рода аналогий прослеживается далеко назад через тех, кто уподоблял психику телефонной станции, до Ламетри...
и, конечно, далее до Декарта... Винер показал, что как жи-
вотные, так и машины могут быть включены в новый и более обширный класс вещей " (Аптер М. 1970). Было констатиро-
вано, что кибернетика "вообще не относится ни к одной из существующих конкретных наук, изучающих строго определенные формы движения материи" (Моисеев В.Д., 1965)
Основатели кибернетики — Норберт Винер, Артур Розенблют, Юлиан Бигелоу, Уолтер Б. Кэннон, Уоррен С. Маккаллох, Уолтер Питтс, У. Росс Эшби, Клод Шенон и Джон фон Нейман — верили, что они разрабатывали общую теорию процессов управления (Винер Н., 1968). Для них процесс управления был средством поддержания порядка в любой среде, как органической, так и неорганической. Исходя из этого представления кибернетики, компьютер как таковой не является кибернетическим изобретением. Он может стать частью кибернетической системы при объединении с другими компонентами этой системы в соответствии с теорией управления.
Норбертом Винером были сформирована концепция «Петли обратной связи и саморегулирования» и введено понятие «Обратная связь»
По концепции Винера, петля обратной связи представляет собой кольцевую систему причинно связанных элементов, в которой изначальное воздействие распространяется вдоль узлов петли так, что каждый элемент оказывает влияние на последующий, пока последний из них не «принесет сообщение» первому элементу петли (рис. 41, Б).