

ЗФ / Контрольная / план скоростей и ускорений
.docЗадача 2 Структурный и кинематический анализ механизма
Структурный анализ механизма.
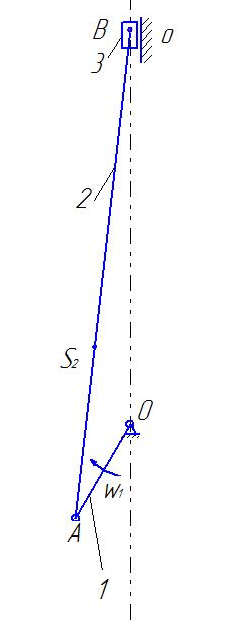
Рисунок 1 – Кинематическая схема рычажного механизма.
Число степеней свободы плоского механизма определяется по формуле П.Л. Чебышева:
![]() ,
,
где
![]() – число подвижных звеньев, n=3;
– число подвижных звеньев, n=3;
![]() –
число кинематических пар пятого класса,
–
число кинематических пар пятого класса,
![]() ;
;
![]() –
число кинематических пар четвертого
класса,
–
число кинематических пар четвертого
класса,
![]() 0.
0.
![]() .
.
Таблица 1 – Классификация звеньев механизма
|
№ на КС |
Название |
Условное обозначение |
Движение |
|
0 |
Стойка |
а) б) |
Нет |
|
1 |
Кривошип |
|
Вращательное |
|
2 |
Шатун |
|
Сложное |
|
3 |
Ползун |
|
Поступательное |




Таблица 2 – Классификация кинематических пар
|
№ пп |
Название |
Условное обозначение |
Элемент пары (высшая, низшая) |
Класс пары |
|
1 |
Вращательная |
|
Поверхность, низшая |
5 |
|
2 |
Вращательная |
|
Поверхность, низшая |
5 |
|
3 |
Вращательная |
|
Поверхность, низшая |
5 |
|
4 |
Поступательная |
|
Поверхность, низшая |
5 |




Кинематический анализ
Исходные данные: φ=1200, ω1=180 рад/с , l1= 0,0575 м, l2=0,26 м, AS2 = 0,091
Решение:
Масштаб построения кинематической схемы:
![]()
где l1 – заданная длина звена 1; (OА) – длина звена на схеме.
Строим схему механизма в заданном положении φ=1200, принимая за начало отсчета крайнее верхнее (в.м.т.) положение поршня 3 (начало рабочего хода) .
Входное (ведущее) звено 1 совершает
вращательное движение c
постоянной угловой скоростью
![]() .
.
Модуль скорости точки А определяется по формуле:
![]() .
.
Построение плана скоростей
На поле чертежа произвольно выбирается
точка
![]() - полюс плана скоростей. Из точки
- полюс плана скоростей. Из точки
![]() откладываем отрезок
откладываем отрезок
![]() перпендикулярный OА
и направленный в сторону вращения
кривошипа 1. Точка О звена OА
неподвижна и находится в полюсе
перпендикулярный OА
и направленный в сторону вращения
кривошипа 1. Точка О звена OА
неподвижна и находится в полюсе
![]() плана скоростей.
плана скоростей.
Масштаб плана скорости определяется как
![]() .
.
В плоскопараллельном движении скорость точки В определяется из системы уравнений:
![]()

Относительная скорость
![]() направлена перпендикулярно звену АВ.
Вектор скорости ползуна В направлен
параллельно оси Y..
направлена перпендикулярно звену АВ.
Вектор скорости ползуна В направлен
параллельно оси Y..
Положение точки S2 определяется на основании свойств подобия:
![]() ,
откуда
,
откуда
![]() .
.
Из построенного плана скоростей определяем скорости точек и звеньев механизма
![]()
![]()
![]() ;
;
Угловая скорость звена 2 :
![]()
Построение плана ускорений
Построение плана ускорений производится в следующей последовательности. Ускорение точки A определится из следующего уравнения:
![]()
Нормальное ускорение точки A
![]() направлено по звену OA к
центру вращения , а его модуль определится
по формуле:
направлено по звену OA к
центру вращения , а его модуль определится
по формуле:
![]()
Ведущее звено 1 вращается с постоянной
угловой скоростью
![]() ,
тогда его угловое ускорение
,
тогда его угловое ускорение
![]() равно нулю. Тангенциальное ускорение
точки A определяется по
формуле
равно нулю. Тангенциальное ускорение
точки A определяется по
формуле
![]() ,
и также равно нулю.
,
и также равно нулю.
На поле чертежа произвольно выбирается
точка
![]() - полюс плана ускорений. Из точки
- полюс плана ускорений. Из точки
![]() откладывается произвольной длины
отрезок
откладывается произвольной длины
отрезок
![]() в мм (принимаем
в мм (принимаем
![]() )
параллельно OA и направленный
от точки A к точке O.
Точка 0 звена ОА неподвижна и будет
находиться в полюсе
)
параллельно OA и направленный
от точки A к точке O.
Точка 0 звена ОА неподвижна и будет
находиться в полюсе
![]() плана.
плана.
Масштаб плана ускорения определяется как
![]()
В плоскопараллельном движении ускорение точки B определяется из системы уравнений:
![]()

Нормальное ускорение
![]() направлено параллельно звену 2 , а
тангенциальное ускорение
направлено параллельно звену 2 , а
тангенциальное ускорение
![]() - перпендикулярно звену 2. Модуль
нормального ускорения определяем по
формуле:
- перпендикулярно звену 2. Модуль
нормального ускорения определяем по
формуле:
![]()
Длина отрезка нормального ускорения звена 2 на плане ускорений
![]()
Из плана ускорений c учетом масштаба ускорений определяем ускорения точек и звеньев механизма:
![]()
![]()
Угловое ускорение звена 2 :
![]()
Угловое ускорение направлено в соответствии с касательным ускорением.
Список литературы
1.Артоболевский И.И. Теория механизмов и машин. М.: Наука, 1988. – 640 с.