

курсовая 5
.docxНаибольшее распространение среди систем управления скоростью ДТП получили системы, в которых скорость регулируется изменением напряжения на якоре двигателя за счет управляемого преобразователя (тиристорного или транзисторного выпрямителя, широтно-импульсного преобразователя) при подчиненном контуре регулирования тока двигателя. Функциональная схема ЭП с подобной системой регулирования рис. 7.5, где двигатель Д с независимым возбуждением получает питание от управляемого преобразователя УП – реверсивного тиристорного преобразователя с двумя выпрямительными группами со встречно параллельной схемой включения и с раздельным их управлением.
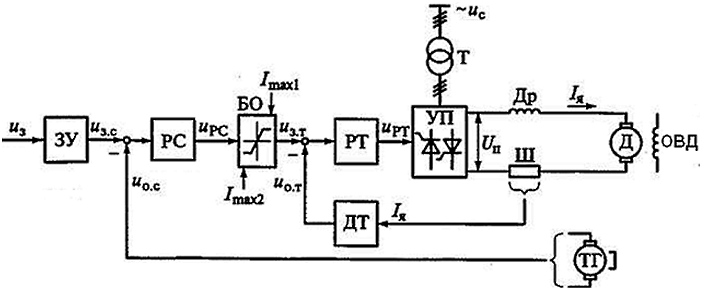
Рис. 7.5. Функциональная схема ЭП с подчиненным регулированием тока и скорости
Согласование номинальных значений напряжения, питающем УП сети ~ uc, его выходного напряжения и тока якоря двигателя, обеспечивается трансформатором Т. При необходимости улучшения условий коммутации тока якоря двигателя за счет ограничения скорости его изменения в цепи якоря двигателя устанавливается дроссель Др. Сглаживание пульсаций тока якоря способствует также уменьшению вибраций и шума в двигателе.
Система управления ЭП содержит два контура регулирования: внутренний контур тока якоря (КТ) и внешний контур скорости (КС). Контур тока включает в себя силовую часть ЭП с выходом по току якоря Iя, цепь ООС по току якоря и регулятор тока якоря РТ. На входе РТ сравниваются напряжение задания тока якоря uзт и напряжение ОС иот, поступающее с датчика тока ДТ. На вход ДТ подается напряжение с шунта Ш, пропорциональное току якорной цепи двигателя. Блок БО ограничивает выходное напряжение иРС регулятора скорости PC.
Блок БО ограничивает выходное напряжение PC и тем самым максимальное напряжение задания uЗТ тока якоря двигателя, обеспечивая в замкнутом КТ якоря двигателя ограничение этого тока на уровне максимально допустимого значения IМАХ. Уровень ограничения статической характеристики БО независимо регулируется сигналами IМАХ1, IМАХ2.
Структурная схема ЭП (рис. 7.6) соответствует следующим допущениям: регулировочная характеристика управляемого преобразователя линейна; ток якорной цепи двигателя непрерывный; отсутствует реакция якоря двигателя; момент инерции, приведенный к валу двигателя, постоянен; инерционность датчиков тока и скорости не учитывается ввиду ее малости. Обозначения, принятые на схеме:
ТЭ – электромагнитная постоянная времени якорной цепи, с;
RЯ – сопротивление якорной цепи, Ом;
J – суммарный момент инерции ЭП, приведенный к валу двигателя, кг·м2;
КП – коэффициент усиления УП;
ТП – постоянная времени цепи управления преобразователей учитывающая коммутационные запаздывания и наличие фильтров, с ТП<10мс;
КЖ – передаточный коэффициент двигателя, рад/В·с;
кОТ – коэффициент ОС по току, Ом;
кОТ – коэффициент ОС по скорости двигателя (В·с)/рад;WРТ(p) и WРС(p) – передаточные функции регуляторов соответственно тока и скорости.
Внешний контур скорости. Данная схема не соответствует каскадной структуре подчиненного регулирования (см. рис. 7.4) из-за дополнительной связи по ЭДС двигателя, воздействующей на контур тока. С помощью известных правил преобразования структурных схем можно привести данную схему к виду каскадной структуры (рис. 7.7).
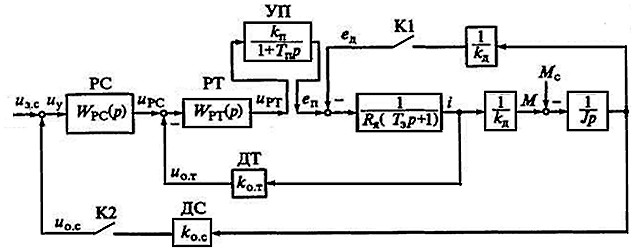
Рис. 7.6. Структурная схема ЭП с подчиненным
регулированием тока и скорости
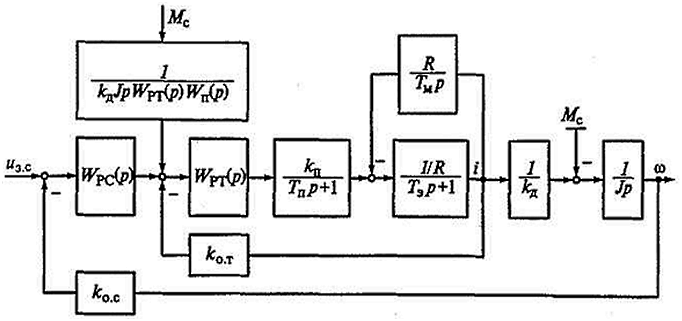
Рис. 7.7. Преобразованная структурная схема ЭП
Тогда передаточная функция разомкнутого контура тока будет иметь вид
![]() ,
(7.29)
,
(7.29)
где кТ – коэффициент усиления в контуре тока;
![]() .
(7.30)
.
(7.30)
За Tμ для контура тока может быть принята малая постоянная времени преобразователя Тп.Приравнивая выражения (7.29) и (7.30), получаем
![]() .
(7.31)
.
(7.31)
Без учета ОС по ЭДС двигателя
![]() ,
(7.32)
,
(7.32)
![]() .
(7.33)
.
(7.33)
Из-за действия ЭДС двигателя оптимизированный без учета этого действия контур тока не является астатическим. При включении контура тока на неизменное задающее напряжение иЗ.Т устанавливается, согласно (7.29) и (7.33), постоянное значение тока
 ,
(7.34)
,
(7.34)
которое
оказывается в  раз
меньше заданного значения
раз
меньше заданного значения  Это
объясняется тем, что после отработки
контуром тока скачка напряжения
пропорциональной части ПИ-регулятора
Это
объясняется тем, что после отработки
контуром тока скачка напряжения
пропорциональной части ПИ-регулятора  его
интегральная составляющая 1/kT2TП р
обусловливает линейное нарастание ЭДС
преобразователя еП и
линейное нарастание ЭДС двигателя
еД (рис.
7.8). При достижении предельного значения
еП =
Ептах ток
начинает снижаться, стремясь к нулю при
отсутствии момента нагрузки. В
установившихся режимах при М = МСи
I = IС интегральная
составляющая ПИ-регулятора обеспечивает
постоянное значение тока
его
интегральная составляющая 1/kT2TП р
обусловливает линейное нарастание ЭДС
преобразователя еП и
линейное нарастание ЭДС двигателя
еД (рис.
7.8). При достижении предельного значения
еП =
Ептах ток
начинает снижаться, стремясь к нулю при
отсутствии момента нагрузки. В
установившихся режимах при М = МСи
I = IС интегральная
составляющая ПИ-регулятора обеспечивает
постоянное значение тока  ;
;
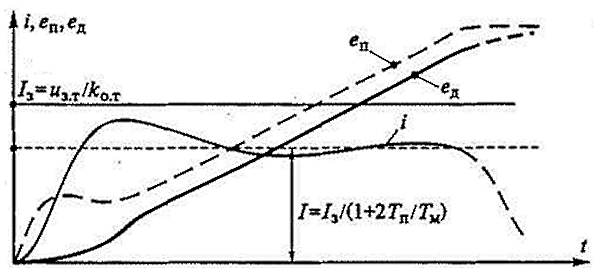
Рис. 7.8. Переходные функции тока, ЭДС преобразователя и двигателя при скачке задания на входе контура регулирования тока
При этом электромеханическая характеристика двигателя представляет собой вертикальную прямую в диапазоне скоростей, определяемом значениями ±Enmax .
Контур тока входит в состав объекта управления контура скорости. Без учета ЭДС двигателя (ключ К1 на рис. 7.6 разомкнут) и при МС=0 передаточная функция разомкнутого контура скорости имеет вид

где DT(p) = 2Тμр(Тμр+1)+1 – характеристический полином оптимизированного замкнутого контура тока.
Настраивая контур скорости на модульный оптимум с желаемой передаточной функцией

определяем тип и параметры регулятора скорости:
![]() (7.35)
(7.35)
Для получения МО в контуре скорости требуется ПИ-регулятор скорости, реализуемый как усилитель с характеристикой управления:
![]()
![]()
где uНАС = uЗ.Т = kО.ТIЗ.
Передаточная функция замкнутого контура скорости (ключ К2 на рис. 7.6 замкнут) относительно скорости определяется выражением
![]() (7.36)
(7.36)
где малая постоянная времени Тμ = ТП.
Реакция оптимизированного контура скорости на возмущение по моменту нагрузки при uЗ.С = 0 определяется передаточной функцией по данному воздействию, которая находится из структурной схемы рис. 7.6:

где βз – жесткость механической характеристики ЭП с настроенным на МО контуром скорости;
где β – жесткость естественной механической характеристики ЭП (Р = J/TM).
Регулирование скорости пропорциональным регулятором оказывается статическим. В зависимости от значения отношения TМ/(4Tμ) жесткость замкнутого ЭП может быть больше, меньше или равной жесткости естественной характеристики (рис. 7.9).
Для получения астатического регулирования скорости может быть использован симметричный оптимум на основе ПИ-регулятора скорости (ПИ-PC). Передаточная функция ПИ-PC определяется на основании известной для СО желаемой передаточной функции разомкнутого контура
![]() (7.37)
(7.37)
Передаточная функция замкнутого контура скорости с ПИ-РС определяется выражением 7.38.
Реакция оптимизированного по СО контура скорости на возмущение по моменту нагрузки при uЗ.С = 0 определяется передаточной функцией 7.39.
![]() ,
(7.38)
,
(7.38)
![]() .
(7.39)
.
(7.39)
Регулирование скорости при ПИ-PC оказывается астатическим, т.е. механическая характеристика ЭП в не действия токо ограничения имеет в установившихся режимах (р=0) бесконечно большую жесткость (характеристика 1 на рис. 7.9).
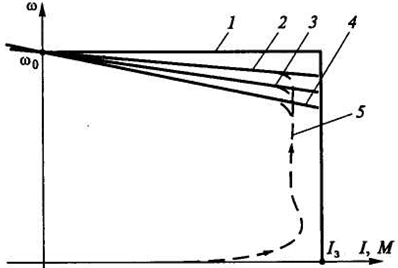
Рис. 7.9. Механические характеристики ЭП с подчиненным регулированием тока и скорости:
1– при ПИ-РС; 2– при П-РС и TМ/(4Tμ) > 1; 3 – при П-РС и TМ/(4Tμ)=1; 4 –при П-РС и TМ/(4Tμ) < 1; 5 –динамическая механическая характеристика
Согласно
формулам (7.36), (7.38), характеристические
полиномы замкнутого контура скорости
с П-РС и ПИ-PC имеют соответственно третий
и четвертый порядки. В практических
расчетах данные полиномы заменяют без
значительной погрешности на полином
второго порядка, пренебрегая в контуре
тока малой постоянной времени Tμ(DT(p)
= Ттр
+ 1 = 2 Tμр
+ 1) или принимая контур тока за
безынерционный (DT(p)
= 1). ![]() Отработка
контуром скорости скачков задающего
воздействия или мо-мента нагрузки в
относительных единицах ω/ω3,
М/МС или
i/IС согласно
передаточным функциям (7.38) и (7.39), показана
на рис. 7.9.
Отработка
контуром скорости скачков задающего
воздействия или мо-мента нагрузки в
относительных единицах ω/ω3,
М/МС или
i/IС согласно
передаточным функциям (7.38) и (7.39), показана
на рис. 7.9.
Отработка небольшого скачка задания скорости, когда отсутствует насыщение регулятора скорости (uРС<uнас), происходит при П-РС с пере-регулированием σ = 8% (кривая 1), а при ПИ-PC и фильтре с постоянной времени Tμ на входе контура – с σ = 6,2% (кривая 3).
Аналогично протекает и процесс сброса момента нагрузки. При большом скачке задания скорости, когда иРС = инас, контур тока обеспечивает постоянство тока i = uнас/кО.Т (без учета влияния ЭДС двигателя) и линейное нарастание скорости до момента времени, когда PC выходит из насыщения. Далее снижается задание на ток, который стремится к нулю при Мс = 0, а скорость стремится к значению ω0 = иЗ.С/kО.С.
Динамический перепад скорости ∆ω в режиме наброса момента нагрузки МС определяется в соответствии с данной передаточной функцией (7.40):
![]() .
(7.40)
.
(7.40)
Подставляя в (7.40) выражение для W3(р), получаем при П-РC:
![]() .
(7.41)
.
(7.41)
И при ПИ-РС:
![]() .
(7.42)
.
(7.42)
На рис. 7.10 изображены переходные функции относительных значений тока, момента, скорости по задающим воздействиям при модульном оптимуме (1), симметричном оптимуме без входного фильтра (2) и с входным фильтром (3), а также переходные функции относи-тельного перепада скорости по скачку момента нагрузки при симметричном (4) и модульном (5) оптимумах.
Внутренняя связь по ЭДС двигателя при сохранении стандартных настроек регуляторов несколько повышает демпфирование и снижает перерегулирование в режимах отработки сброса – наброса момента нагрузки.
|
|
|
Рис. 7.10. Переходные функции относительных значений тока, момента, скорости по задающим воздействиям |

ЭДС оказывает влияние и на работу контуров тока и скорости при отработке входных воздействий, снижая динамический ток при скачке задания и повышая ошибку отработки скорости при ее линейном задании. Существенное влияние ЭДС проявляется только при неблагоприятном соотношении параметров (пониженные значения ТМ и ТЭ, повышенное значение Tμ).
Простота П- и ПИ-регуля-торов и их оптимальных наст-роек обусловила преимущест-венное применение данных регуляторов в системах управления с подчиненным регулированием координат ЭП.
Рассмотрим пример синтеза регуляторов тока и скорости в системе подчиненного ЭП:
Пример 7.1. Определить тип и параметры регуляторов тока и скорости рис.7.11, составить элементную базу их аналогового исполнения при условии токо ограничения на уровне максимально допустимого тока двигателя и статизма контура скорости не более 5%.
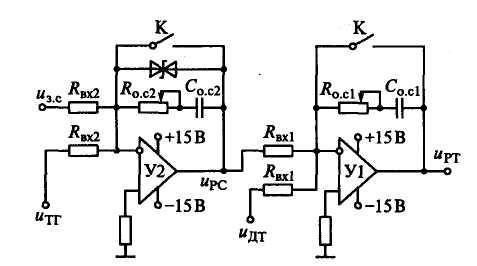
Рис. 7.11. Схемы регуляторов тока и скорости
Исходные данные: силовая часть ЭП представляет собой тиристорный преобразователь – ДПТНВ; номинальные напряжение, ток, момент и скорость двигателя:
ином = 220 В, Iном = 21 А, Мном = 23,5 Н · м, ωном = 162 рад/с;
максимально допустимые ток и момент двигателя:
Imах = 63 А, Мmах = 70Н·м;
передаточный коэффициент и момент инерции двигателя:
кд = 0,83 рад/(В ∙ с), J = 0,05 кг∙ м2;
сопротивление и электромагнитная постоянная времени якорной цепи:
Rя = 1,8 Ом, Тэ = 0,022 с;
максимальная ЭДС, коэффициент усиления и постоянная времени тиристорного преобразователя:
Еп.мах = 300 В, кп= 25, Тп= Tμ= 0,01 с;
а также передаточный коэффициент датчика скорости
кдс = кос = 0,032 В·с/рад.
Решение
По условию задачи принимаем за элементную базу построения регуляторов операционные усилители с напряжением питания ±15 В и выходным стабилизированным напряжением ±10 В (например, микросхемы типа К553 УД2).
Для контура тока без учета влияния ЭДС двигателя используется пропорционально-интегральный тип регулятора с передаточной функцией Wрт(р) = (Tк1+ 1)/Т01р и параметрами Гк1 = Тэ = 0,022с, TO1 =2Тμкт. Для заданного токо ограничения на уровне Imах = 63А и максимального стабилизированного напряжения на входе контура тока uзтmах = uнас = 10В определяем коэффициент ОС по току, и постоянную интегрирования регулятора:
![]() ,
,

Действие ЭДС двигателя на контур тока при пуске с насыщенным РС снижает максимальный ток до значения
Здесь Тм = k2дRяJ=0,832· 1,8 · 0,05 = 0,062 с. Подставляя полученное значение в приведенную выше формулу, получаем
При выборе типа регулятора скорости следует учитывать допустимый по условию задачи статизм регулирования скорости

Статизм, соответствующий естественной механической характеристике ЭП, составляет

Следовательно, требуемое повышение жесткости механической характеристики

П-регулятор скорости обеспечивает повышение жесткости
![]()
Таким образом, П-РС не обеспечивает требуемого статизма регулирования скорости и следует принять пропорционально-интегральный тип регулятора с передаточной функцией
Для реализации регуляторов тока и скорости используем операционные усилители в схеме включения ПИ-регулятора (рис. 7.11).
Параметры регуляторов обеспечиваются соответствующими значениями сопротивлений и емкостей с учетом условия, что сопротивление нагрузки усилителя Rнaг должно быть не меньше допустимого Rдоп (для типовых микросхем R=2кОм).
Для регулятора тока
Со.с1 = 0,5 мкФ; Ro.с1 = 44 кОм; Tк1 = Ro.с1Сo.с1 = 0,022 с; Rвх1 = 88 кОм; Т01 = Rвх1Со.с1 = 0,044 с.
Для регулятора скорости
Со.с2 = 1 мкФ; Ro.с2 = 80 кОм; Тк2 = Ro.с2 Со.с2= 0,08 с; Rвх2 = 15,4 кОм; Т02= Rвх2Сос2 = 0,0154 с.
Максимальное задающее напряжение
Uз.cmax = ко.с кдЕп0 = 0,032·0,83·233 = 6,2В.
Схема управления серийного электропривода типа ЭТЗР
Для привода механизмов различных металлообрабатывающих станков, требующих регулирования скорости при мощности до 11 кВт, используется серийный комплектный ЭП типа ЭТЗР (рис. 7.12) с двигателями серий ПБСТ, 2П или ПГТ. ЭП этого типа выполнен в виде замкнутой системы регулирования скорости с ООС по скорости, которая в зависимости от настройки обеспечивает относительный перепад ско-рости в пределах 0,5-10% при изменении момента нагрузки от 0,1 Mном до Mном. В ЭП обеспечивается также регулирование (ограничение) тока с помощью устройства токо ограничения УТО. Для обеспечения устойчивости требуемого качества переходных процессов ЭП в схеме приме-нены гибкие ОС по скорости двигателя и результирующему сигналу управления Uy2.
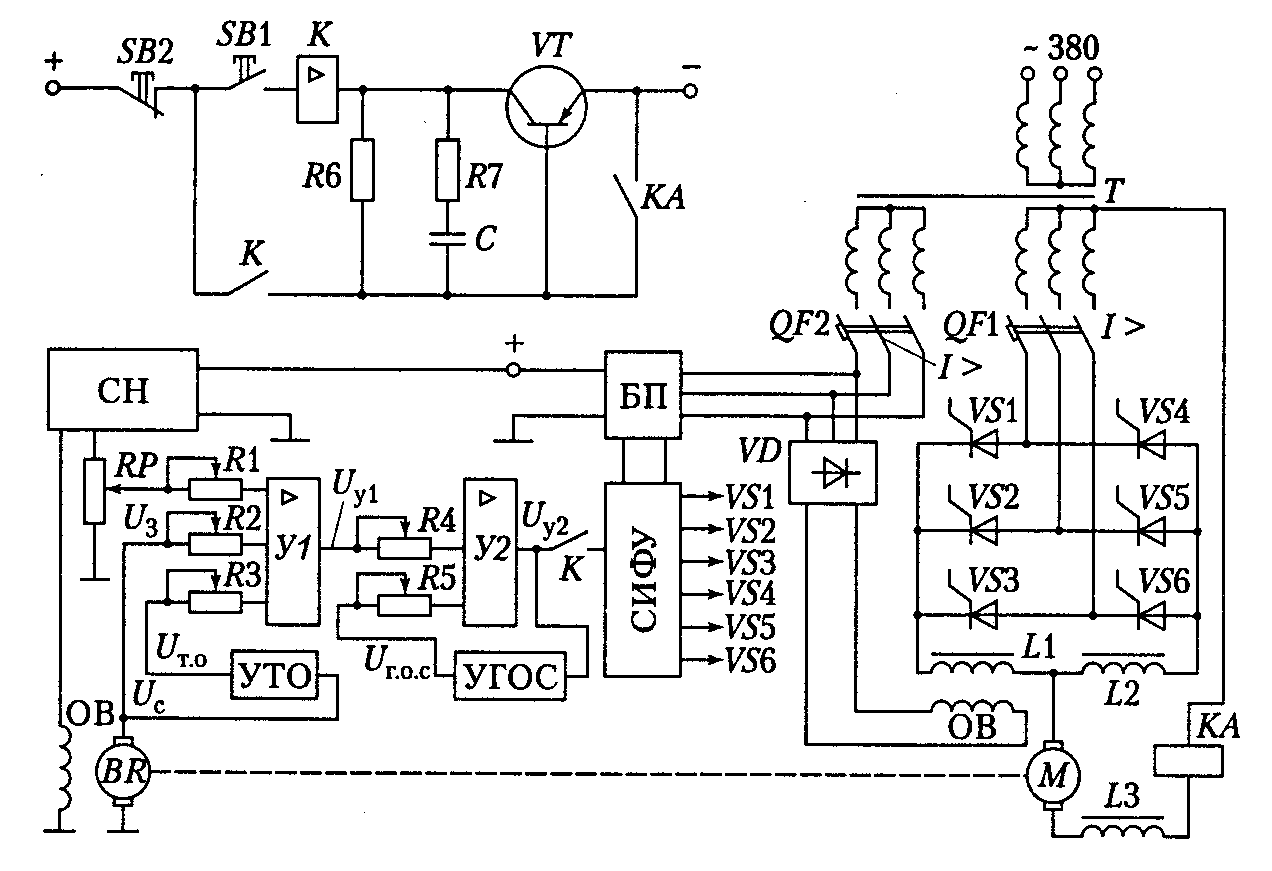
Рис. 7.12. Схема серийного ЭП типа ЭТЗР
Якорь двигателя, имеющего встроенный тахогенератор BR, получает питание от реверсивного тиристорного преобразователя с двумя комплектами тиристоров VS1–VS6, составляющих выпрямительную и инверторную группы. Управление этими группами осуществляется с использованием согласованного совместного принципа.
Для уменьшения переменной составляющей уравнительного тока, протекающей между выпрямительной и инверторной группами, в схеме используются ограничительные реакторы L1 и L2. Включение в цепь якоря сглаживающего реактора L3 позволяет исключить режим прерывистого тока и повысить использование двигателя по току.
Управление тиристорами VS1–VS6 обеспечивается транзисторной схемой СИФУ, работающей по вертикальному принципу. Она имеет три канала, каждый из которых работает на два тиристора, включенных в одну фазу.
Питание ЭП осуществляется от трехфазного трансформатора Т с двумя вторичными обмотками. К одной из них, имеющей нулевой вывод, подключена силовая часть привода, а ко второй – обмотка возбуждения OВ (через выпрямитель VD) и блок питания БП, от которого питается схема управления. Обмотка OВ тахогенератора получает питание от стабилизатора напряжения СН.
В состав схемы управления ЭП входят промежуточный усилитель У1, усилитель мощности (эмиттерный повторитель) У2, узел токо ограничения УТО, узел гибкой ОСУГОС, задающий потенциометр RP, кнопки управления SB1 и SB2 и пусковое реле К.
Сигнал управления Uy1 формируется как алгебраическая сумма сигналов задающего Uз, ОС по скорости Uс и токо ограничения Uт.о, для вы-работки которого используется нелинейная положительная ОС по скорости двигателя. При токе якоря, меньшем тока отсечки, работает только контур регулирования скорости. При токе якоря, превышающем ток отсечки, за счет нелинейности цепи токо ограничения отрицательная ОС по скорости ДПТ отключается и начинает действовать положительная ОС, обеспечивая ограничение тока и момента на заданном уровне.
Для обеспечения необходимого качества переходных процессов ЭП в схеме используется гибкая ОС, действующая только в переходных процессах. Сигнал корректирующей гибкой обратной связи Uг.o.с вместе с сигналом управления Uy1 поступает на вход усилителя мощности У2 и после усиления в виде результирующего сигнала Uу2 подается на вход СИФУ через замыкающий контакт пускового реле К. Управление этим реле осуществляется с помощью кнопок управления: SB1 при пуске двигателя и SB2 при его останове. Реверсирование двигателя осуществляет-ся путем изменения полярности задающего сигнала Uy.
В ЭП типа ЭТЗР реализуется ряд защит, блокировок и сигнализаций. Токовое реле КА, катушка которого включена в цепь якоря двигателя, а контакт – в цепь питания реле К, обеспечивает максимальную токовую защиту ЭП. При его срабатывании отключается реле К, с тиристоров снимаются сигналы управления и двигатель отключается от источника питания.
Автоматические выключатели QF1 и QF2 осуществляют максимальную токовую защиту силовой части тиристорного преобразователя, обмотки возбуждения двигателя и схемы управления.
Схема ЭП с микропроцессорным управлением
Рассмотрим схему ЭП с ДПТ для регулирования положения исполнительного органа робототехнического устройства с использованием МП управления (рис.6.5, фрагмент программы рис.7.13). Этот ЭП должен обеспечивать перемещение и точное позиционирование исполнительного органа робота, для чего в нем используется ОС по положению. Для обеспечения высокой точности позиционирования в ЭП осуществляется также регулирование тока (момента) и скорости.
Характерный пример выполнения подобных схем (см. рис.6.5, когда в них применяются как аналоговые, так и цифровые узлы и устройства управления. Такие схемы, получившие название цифроаналоговых, сочетают в себе лучшие свойства тех и других устройств.
|
|
|
Рис.7.13. Фрагмент программы ЭП с микропроцессорным управлением |
Силовая часть ЭП образована трехфазным мостовым реверсивным тиристорным преобразо-вателем ТП, питаемым от трансформатора ТР. Схема управления построена по принципу под-чиненного регулирования координат. Регулирование тока производится аналоговым ПИ-регулятором тока РТ, на вход которого поступают сигналы обратной связи по току от датчика тока ДТ и задания тока UЗ.Т, с выхода регулятора скорости.
Аналоговый П-регулятор скорости реформирует сигнал задания тока UЗ.Т на основе своего за-дающего сигнала UЗ.С, поступающего на него с внешнего по отношению к нему контура положения, и сигнала ОС по скорости, вырабатываемого тахогенератором ТГ. Стабилитроны VD1 и VD2 ограничивают сигнал на выходе PC, чем обеспечивается ограничение тока и момента двигателя.
Регулирование положения осуществляется с помощью микропроцессорной системы, включающей в себя микропроцессор МП, устройства памяти ОЗУ и ПЗУ, устройства сопряжения УС1–УСЗ, цифровой датчик положения ДП, цифро-аналоговый преобразователь ЦАП. Сигнал задания положения SЗ.П поступает (задается) с терминала Т, подключаемого к микропроцессорной системе через УСЗ. Тем самым микропроцессорная система выполняет, по существу, роль регулятора положения РП.
Работа цифрового РП в МП системе может основываться на одном из двух принципов. Первый из них предусматривает реализацию статической характеристики РП в виде параболы, которая обеспечивает оптимальный график движения ЭП. Такой регулятор можно реализовать программным путем, записав в ПЗУ эту нелинейную характеристику РП.
Второй
принцип работы РП основан на вычислении
момента начала торможения ЭП, что также
позволяет получить требуемую точность
регулирования положения. Реализация
способа основана на том, что при известных
скорости ωУСТ и
ускорении  могут
быть рассчитаны время tТ и
путь
могут
быть рассчитаны время tТ и
путь  на
участке торможения ЭП в конце отработки
заданного перемещения SЗ.П по
следующим формулам:
на
участке торможения ЭП в конце отработки
заданного перемещения SЗ.П по
следующим формулам:
![]() ,
(7.41)
,
(7.41)
![]() .
(7.42)
.
(7.42)
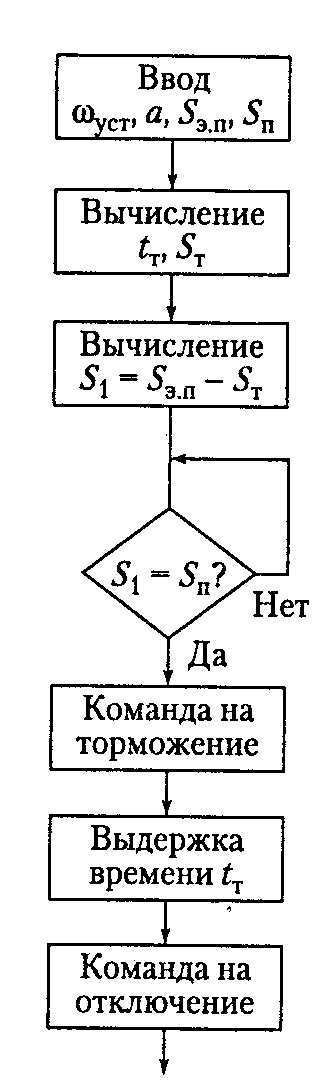
Алгоритм
работы МП системы при выработке сигнала
на торможение приведен на рис. 7.13. Для
его реализации в микропроцессорную
систему вводятся данные по величинам
ωУСТ,
а, SЗ.
П и
сигнал SП датчика
положения ДП, пропорциональный текущему
положению вала двигателя и исполнительного
органа. МП система производит вычисление
tт и  по
(7.41) и (7.42) и разности S1 =
SЗ.
П –SЗ.
Затем сопоставляются величины этой
разности S1 с
сигналом датчика положения SП.
Как только S1,
станет равной SП,
от МП системы выдается команда на
торможение ЭП, начинается отсчет выдержки
времени tт ,
и по истечении этого интервала выработается
команда на отключение ЭП.
по
(7.41) и (7.42) и разности S1 =
SЗ.
П –SЗ.
Затем сопоставляются величины этой
разности S1 с
сигналом датчика положения SП.
Как только S1,
станет равной SП,
от МП системы выдается команда на
торможение ЭП, начинается отсчет выдержки
времени tт ,
и по истечении этого интервала выработается
команда на отключение ЭП.
Пример 7.2.ЭП рис.7.14. Двигатель имеет данные РНОМ = 14кВт, напряжение питания UНОМ = 220 В, номинальная скорость ωНОМ = 104,7 рад/с, номинальный ток якоря IНОМ = 82 А, номинальный КПД ηНОМ = 82%, сопротивление цепи якоря RЯ = 0,22 Ом, индуктивность цепи якоря LЯ= 4,4 мГн.
Параметры других элементов схемы:
1) преобразователь: коэффициент усиления kП = 23, постоянная времени ТП = 0,01 с, внутреннее сопротивление RП= 0,15 Ом;
2) тахогенератор: коэффициент передачи γ = 0,6 В/(рад/с);
3) шунт: сопротивление шунта RШ = 0,00075 Ом;
4) датчик тока ДТ: коэффициент передачи kД.Т = 100. Суммарный момент инерции ЭПJ = 0,8кг•м2. Рассчитать параметры регуляторов тока и скорости и определяющие параметры цепей операционных усилителей.
Определяем суммарное сопротивление якорной цепи:
![]() .
.
Находим постоянную времени цепи якоря двигателя:
Находим коэффициент ОС по току. При R3 = R4 он равен
![]() .
.
Рассчитываем постоянную интегрирования ПИ-регулятора тока:


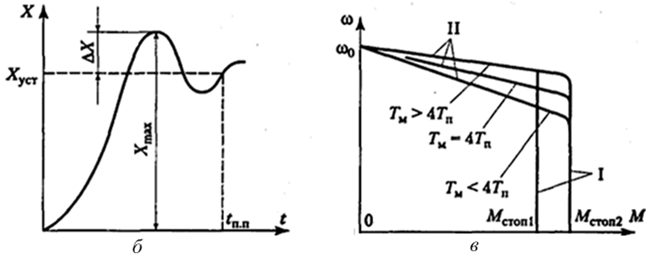
Рис.7.14. Электрический привод с СИФУ (а) и его характеристики (б, в)
Определяем коэффициент усиления регулятора тока:
Задавая RО.С2 = 10кОм, находим параметры операционного усилителя, на котором реализован регулятор тока:

