

Отчеты / Отчет по работе №3
.docxМИНОБРНАУКИ РОССИИ
Санкт-Петербургский государственный
электротехнический университет
«ЛЭТИ» им. В.И. Ульянова (Ленина)
Кафедра АПУ
отчет
по практической работе №3
по дисциплине «Моделирование систем»
Тема: Моделирование динамической системы. Маятник Фуко.
Выполнила: Локкина О. С. Группа 5371
Преподаватель: Туральчук К. А.
Санкт-Петербург
2017
Описание
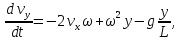
Маятник Фуко представляет собой следующую систему: над центром вращающейся горизонтальной платформы подвешен маятник на длинном подвесе, такой маятник, отклонённый от равновесного положения, совершает колебания в плоскости, неподвижной в инерциальной системе отсчёта. Задача состоит в построении компьютерной и анимационной модели в среде моделирования. Динамическая система с непрерывным временем, называемая маятником Фуко, записывается в виде:
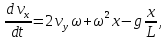
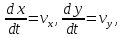 где
ω – относительная частота вращения
платформы, L – длина подвеса, g
– ускорение свободного падения.
где
ω – относительная частота вращения
платформы, L – длина подвеса, g
– ускорение свободного падения.
Модель
Работа выполнялась в AnyLogic 8 PLE. Построена модель:
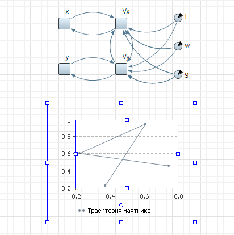
Начальные значения L = 50 м, ω = 0.04 Гц, x = 0 м, y = 0 м. Постоянное значение g = 9.8 м/с2.
Результаты экспериментов
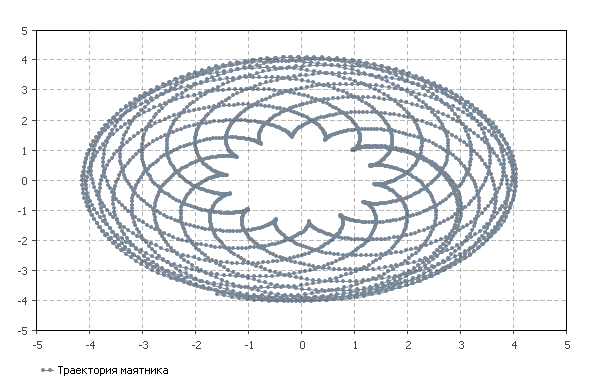
При разных значениях параметров L и ω рассмотрим получившиеся результаты.
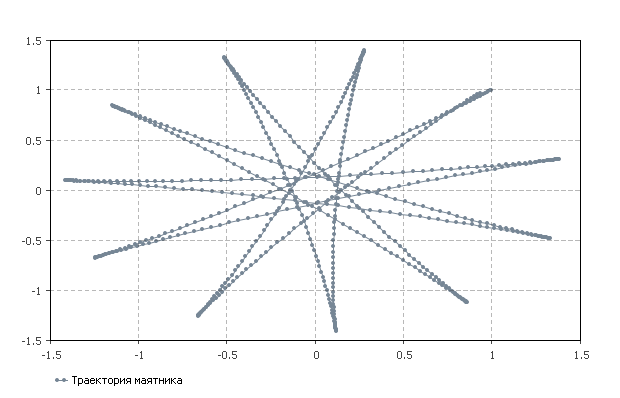
|
L = 50 м, ω = 0.04 Гц |
|
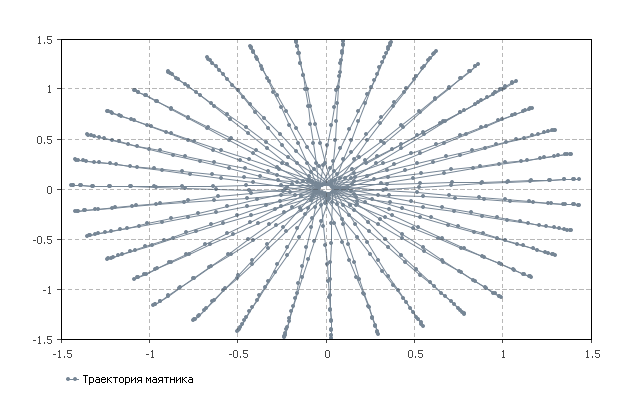
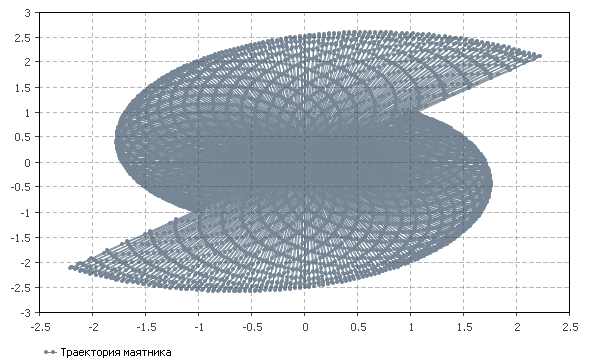
|
L = 500 м, ω = 0.04 Гц |
|
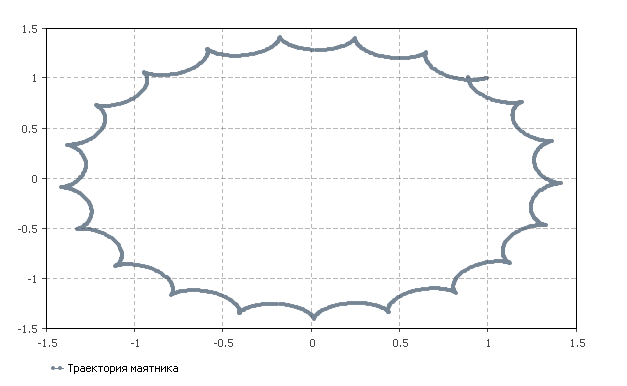
|
L = 5 м, ω = 0.04 Гц |
|
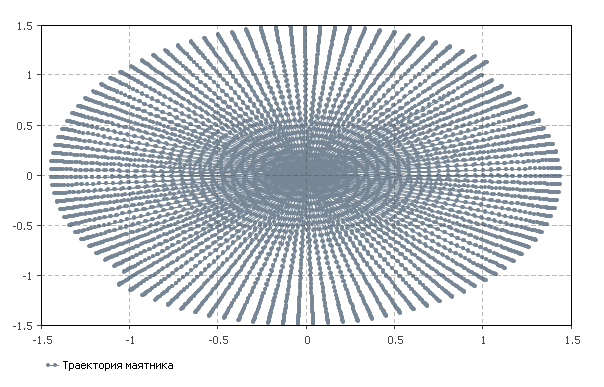
|
L = 50 м, ω = 0.4 Гц |
|
|
L = 50 м, ω = 0.004 Гц |
|
|
L = 500 м, ω = 0.4 Гц |
|
|
L = 5 м, ω = 0.004 Гц |
|

Вывод
В данной практической работе были получены навыки работы с AnyLogic 8 PLE, построена математическая модель маятника Фуко. Рассмотрены критические случаи при разных значения параметров L (500, 50, 5) и ω (0.4, 0.04, 0.004). Построены графики, отображающие траекторию движения маятника.