

ФБТ БИ 1курс / физика лекції
.pdf2.сила завжди направлена до положення рівноваги.
Розглянемо пружину так, щоб зміщення кульки відносно рівноваги дорівнювало якомусь
значенню a. У цьому стані енергія системи складається із потенціальної енергії, що обумовлена додатковим розтягом пружини. Після цього предоставимо систему самій собі. Під дією сили F кулька рухається з прискоренням до положення рівноваги. При цьому потенціальна енергія пружини перетворюється у кінетичну енергію руху кульки.
В стані рівноваги на кульку не діє ніяка сила, тобто пружина повертається у свій початковий стан.
l = l + l .
Потенціальна енергія розтягу пружини повністю перейшла в кінетичну і тому швидкість кульки стала максимальною. З положення рівноваги кулька буде рухатися вверх, зжимаючи пружину. Внаслідок цього на кульку діє сила F=-kx. Швидкість кульки буде зменшуватись, а її кінетична енергія буде перетворюватись в потенціальну енергію зжимання пружини.
В крайньому верхньому положенні швидкість кульки дорівнює нулю, і кінетична енергія повністю перетворюється в потенціальну енергію пружини.
Якщо на систему не діють ніякі сили, то під дією сили kx кулька буде здійснювати коливання від а до –а. Для даної системи другий закон Ньютона:
mx == kx , |
(3) |
x = d 22x . dt
Якщо розділити рівняння (6.1.3) на m, отримаємо:
x = |
− k |
x ; |
|
k |
= ω 2 |
; |
|
|
|||||
|
m |
|
m |
0 |
|
|
|
|
|
|
|||
x +ω0 x = 0 . |
(4) |
|
|
|||
Це рівняння руху кульки під дією сили пружності.
Будь-яке тіло, що здійснює коливання згідно рівняння (4), називається лінійним гармонічним осцилятором.
Рішенням рівняння (4) є рівняння вигляду: x = Acos( ω0t +α) . (5)
Дане рівняння описує вільні незатухаючі гармонічні коливання. У рівнянні x – зміщення системи
від положення рівноваги в момент часу t; А– амплітуда коливань; |
ωt |
- кутова(циклічна) частота |
0 |
коливань; ω0t +α - фаза коливань; α - початкова фаза коливань.
Час T, протягом якого система здійснює одне повне коливання, називається періодом коливань. Число коливань за одиницю часу – частота ν = T1 .
Кутова частота ω пов’язана з періодом і частотою:
0
ω0 = 2Tπ = 2πν ,
1Гц – частота коливання, період якого дорівнює 1 сек.
Якщо рівняння (5) продиференціювати по часу, знайдемо швидкість і прискорення процесу:
v = x = dx = −Aω sin(ω t +α) , |
(7) |
||
dt |
0 |
0 |
|
|
|
|
|
a = |
x = |
|
d |
2 x |
= −Aω0 |
2 |
cos(ω0t +α) . (8) |
||||||
|
dt 2 |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
Позначимо |
− Aω0 |
= v0 |
, тоді: |
|
|||||||||
− Aω2 |
= a |
0 |
|
||||||||||
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
ì x = Ac o sω(0t + α ) |
|
|
|
|
|||||||||
ï |
|
|
|
|
|
|
|
|
|
π |
|
|
|
ï |
v0 c o sω(0t + α + |
) . |
|
||||||||||
ív = |
2 |
(9) |
|||||||||||
ï |
a |
|
c o sω( |
|
|
|
|
|
|||||
ïa = |
0 |
0 |
t + α + π ) |
|
|||||||||
î |
|
|
|
|
|
|
|
|
|
|
|
||
Тобто швидкість та прискорення теж змінюються за гармонічним законом, причому швидкість
π
випереджає переміщення по фазі на 2 , а прискорення і переміщення знаходяться в протифазі.
51
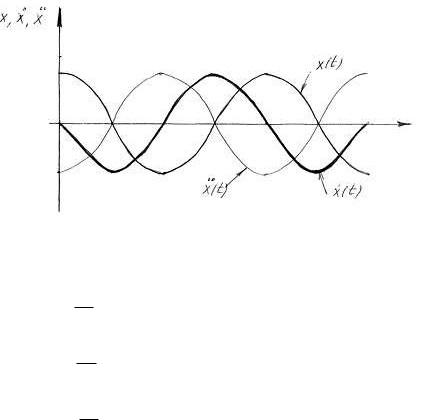
Рис. 3 Враховуючи співвідношення між частотами (6), систему (9) можемо записати:
ì |
|
|
2π |
|
|
|
|
|
||
ï x = |
Aco s |
( |
t + α ) = Aco s2(π νt + α ) |
|
|
|||||
ï |
|
|
|
T |
|
|
|
|
|
|
|
|
|
2π |
|
π |
|
|
|
||
ï |
|
|
|
|
|
|
|
|||
ív = |
v0 |
co s |
( |
t + α + |
2 |
) |
. |
(10) |
||
ï |
|
|
|
|
T |
|
|
|
|
|
ï |
|
|
|
|
2π |
|
|
|
|
|
ïa = |
a0 |
co s |
( |
t + α + π ) |
|
|
||||
î |
|
|
|
|
T |
|
|
|
|
|
52
6.1.3. Енергія коливального руху На прикладі пружинного маятника можна показати, що робота пружної та квазіпружної сили за
повний цикл гармонічного коливання дорівнює нулю. Тоді ці сили є консервативними, а поля цих сил – потенціальні. Це означає, що для коливальної системи виконується закон збереження енергії.
W =Wп +Wк = const . |
(11) |
Виразимо значення енергії коливальної системи через її параметри. Для того, щоб надати зміщення x системі від початкового положення рівноваги необхідно виконати роботу проти сил поля:
x |
x |
|
2 |
A = òδA = −òFdx = +ò(−kx)dx = kx |
. |
||
0 |
0 |
2 |
|
Дана робота іде на надання даній системі запасу потенціальної енергії, тобто потенціальна енергія:
Wп = |
kx |
2 |
. |
(12) |
2 |
|
|||
|
|
|
|
Враховуючи рівняння (5) і те, що mω02 = k , можна записати:
Wп |
= |
ma2ω |
|
2 |
|
|
|
|
2 |
|
0 |
cos2 (ωt + α ) . (13) |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
Кінетична енергія – енергія руху. Враховуючи вираз для швидкості з рівняння (7), знаходимо: |
||||||
Wk |
= |
mv2 |
= |
ma2ω 2 |
sin(ωt + α) |
|
|
|
2 |
0 |
. |
(14) |
|||||
|
|
|
|
2 |
|
|
|
|
|
|
На основі рівнянь (11), (13), (14), знаходимо, що повна енергія системи в будь-який момент часу: |
||||||
W = 1 ma |
2ω2 . |
(15) |
|
|
||||
|
|
2 |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
З рівняння (15) видно, що повна енергія не залежить від часу, що відповідає закону збереження енергії замкненої системи.
Для коливальної системи потенціальну і кінетичну енергію можна виразити через повну енергію:
W |
п |
=W cos 2 (ω t +α) , |
(16) |
|
0 |
|
|
W |
к |
= W sin 2 (ω t +α) . |
(17) |
|
0 |
|
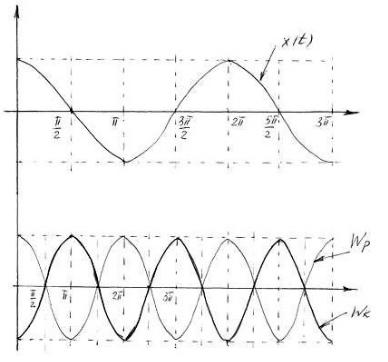
З даних формул витікає, що потенціальна і кінетична енергія змінюються у протифазі, а частота їх зміни в 2рази перевищує частоту гармонічних коливань.
Рис. 4
Середнє значення sin 2 + cos 2 дорівнює половині, і тоді середнє значення потенціальної енергії
дорівнює середньому значенню кінетичної енергії і дорівнює половині повної енергії.
Приведена довжина фізичного маятника – така довжина, при якій період коливань фізичного маятника дорівнює періоду коливань математичного маятника:

I
lпр = I 0 + l .
m
Лекція 10
6.2.Складання коливань
6.2.1.Векторна діаграма. Складання коливань одного напрямку
Будь-яке гармонічне коливання може бути представлене за допомогою вектора A , довжина якого дорівнює амплітуді. Напрям вектора утворює з віссю x кут, що дорівнює початковій фазі коливань:
x = Acos( ω0t +α) .
Якщо привести вектор A в коливальний рух з деякою швидкістю ω0 , то |
проекція вектора на вісь x |
|
буде змінюватись в межах від A до – A . Проекція кінця вектора A на |
вісь x буде здійснювати |
|
гармонічні коливання з амплітудою, яка дорівнює довжині A , циклічною частотою |
ω |
|
0 , і фазою α . |
||
Рис. 1
Такі векторні діаграми відображають собою уявлення коливань і операцій над ними у вигляді векторів і називаються векторними діаграмами.
Нехай матеріальна точка приймає участь у двох гармонічних коливаннях: x1 = A1 cos( ω0t +α1 )
x2 = A2 cos( ω0t +α2 )
з однаковою частотою і вздовж одного напряму.
Математична точка буде здійснювати результуюче коливання, яке можна записати: x = Acos( ω0t +α) .
Знайдемо вираз для амплітуди і початкової фази, скориставшись векторною діаграмою
Рис. 2
Результуючий вектор A дорівнює векторній сумі:
A = A1 + A2 ,
а амплітуда і початкову фазу α знаходимо на основі прямокутного трикутника OBC:
A2 = x2 + y2 = (x + x |
2 |
)2 |
+ (y + y |
2 |
)2 |
= (A cosα |
1 |
+ A cosα |
2 |
)2 + (A sinα |
1 |
+ A sinα |
2 |
)2 = |
||||||||||||
|
|
|
1 |
|
|
|
|
|
1 |
|
|
1 |
2 |
|
1 |
|
2 |
|
|
|||||||
= A2 |
+ A2 |
+ 2A A cos(α |
1 |
+ α |
2 |
). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
1 |
2 |
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Рівняння для визначення початкової фази коливань (α2 |
− α1 ): |
|
|
|
|
|
|
||||||||||||||||||
α = arctg |
A1 sinα1 + A2 sinα2 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
A cosα |
1 |
+ A cosα |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
1 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Якщо проаналізувати цей вираз, то можемо |
побачити, |
|
що при |
α2 -α1 = 0 |
коливання будуть |
||||||||||||||||||||
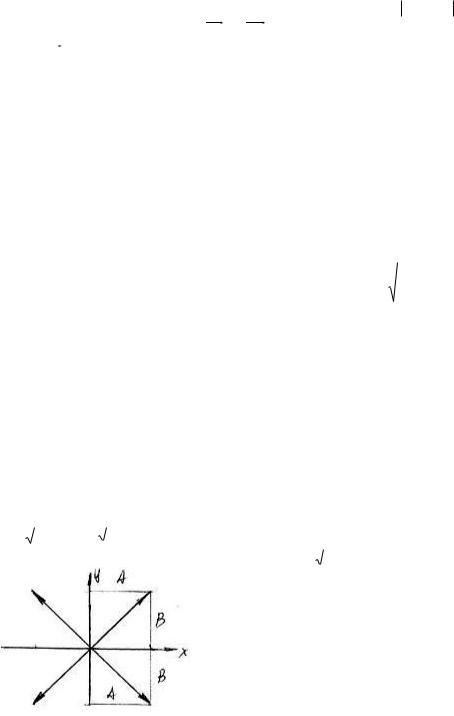
здійснюватись в одній і тій самій фазі. Амплітуда буде сумуватися: A = A1 + A2 . Якщо α2 |
-α1 = ±π , то |
|||||||||||||||||||||||||
коливання будуть знаходитись в протифазі, амплітуда буде: A = A1 − A2 . Якщо частоти коливань –
неоднакові ω1 ¹ ω2 , то вектори |
A1 |
і A2 |
будуть обертатися з різною |
швидкістю, тоді результуючий |
|||
вектор A буде |
пульсувати по |
своїй |
величині і рухатись з несталою |
швидкістю, |
тоді результуюче |
||
коливання – |
не |
гармонічне. Якщо частоти однакового напрямку, відрізняються не |
досить помітно ( |
||||
ω << ω ), |
то |
результат коливання |
можна |
розглядати як гармонічний з пульсуючою амплітудою, |
|||
коливання такого вигляду називають биттям.
6.2.2. Складання взаємно-перпендикулярних коливань Нехай матеріальна точка приймає участь в двох взаємо перпендикулярних коливаннях:
x = Acos ωt - перше коливання , |
(1) |
y = B cos( ωt +α) - друге коливання |
(2) |
з однаковою частотою ω і різницею фаз |
α (наприклад, коливання матеріальної точки відносно |
положення рівноваги в одному напрямі і коливання в напрямі, що перпендикулярний до першого). В даному випадку матеріальна точку буде рухатись по деякій криволінійній траєкторії, рівняння якої в параметричній формі виражається рівняннями (1) і (2). Якщо видалити з них час t, то отримаємо рівняння траєкторії, що
виражається через різницю фаз α . На основі рівняння (2) знаходимо:
y |
= cos(ωt + α) = cosωt cosα − sinωt sinα = |
x |
|
x2 |
|
||
|
|
cosα − sinα |
1− |
|
. |
||
B |
A |
A2 |
|||||
Перенесемо перший доданок у ліву частину рівняння і піднесемо до квадрату ліву і праву частини, і отримаємо рівняння результуючого коливання:
x2 |
|
y2 |
2xy |
2 |
|
|
|
|
+ |
|
− |
AB cosα = sin |
|
α |
|
A2 |
B2 |
|
|
||||
|
|
|
|
|
|
. |
(3) |
Рівняння (3) – рівняння еліпса, півосі А і В якого не співпадають з координатними осями x і y. 1. α = 0
æ x |
|
|
|
y |
ö |
2 |
|
|
|
|
|
|
|
|||
ç |
|
|
- |
|
|
|
÷ |
= 0 . |
|
|
|
|
|
|
||
|
|
|
B |
|
|
|
|
|
||||||||
è A |
|
|
|
ø |
|
|
|
|
|
|
|
|
||||
Звідси маємо рівняння прямої: |
|
|
|
|
||||||||||||
y = |
B |
x . |
(4) |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
||||||||||
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
Тобто |
матеріальна |
точка рухається вздовж |
прямої, |
відстань її |
від початку координат |
||||||
r = |
|
|
|
|
|
|
cos ωt . Тобто результуючий рух є |
гармонійним |
коливанням вздовж прямої |
|||||||
|
|
x 2 |
+ y 2 |
= A2 + B 2 |
||||||||||||
рівняння (3) з деякою частотою ω і амплітудою A = |
|
. |
|
|||||||||||||
A2 + B2 |
|
|||||||||||||||
Рис. 3
2. α = ±π
рівняння (3) прийме вигляд:
æ x |
|
y ö |
2 |
||
ç |
|
+ |
|
÷ |
= 0 . |
A |
|
||||
è |
|
B ø |
|
||
Результуючий рух буде представляти собою гармонічний рух вздовж прямої
y = - |
B |
x |
(5) |
|
|||
|
A |
|
|
Рис. 4 3. α = ± π2
рівняння (3) прийме вигляд:
x2 |
+ |
y2 |
= 1 |
. (6) |
A2 |
B2 |
|||
|
|
|
|
Рівняння еліпса, що приведене до координатних осей x і y. Напівосі еліпса А і В відповідно дорівнюють амплітудам коливань, якщо амплітуди коливань однакові – еліпс перейде у коло.
Випадки α = ± |
π |
відрізняються лише напрямком руху по еліпсу, що витікає з рівнянь (1) і (2): |
|
2 |
|
Рис. 5 |
ω, то їх можна розглянути як |
Якщо частоти коливань відрізняються на досить малу частоту |
|
коливання з однією частотою, але з повільно змінюючоюся різницею фаз |
ωt +α . Тоді рівняння (6.2.1) і |
(6.2.2): |
|
x = Acos ωt |
|
y = B cos( ωt +( ωt +α)). |
|
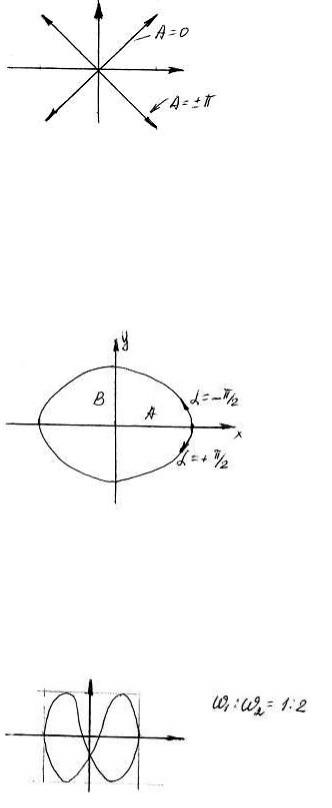
Результуючий рух в даному випадку буде відбуватися по змінній кривій, форма якої залежить лише від різниці фаз, що змінюються в межах (−π;π) . Якщо частоти відрізняються незначно, то траєкторія
приймає вигляд фігур Лісажу. При відношенні частот ω1 : ω2 = 1: 2
Рис. 6
Лекція 11 6.3. Згасаючі та вимушені коливання
6.3.1.Згасаючі коливання. Добротність
Убудь-якої коливальної системи є сили, які перешкоджають коливальному руху, наприклад, сили тертя в точці підвісу маятника, сили опору навколишнього середовища, тощо. Результуючою всіх цих систем називається затримуючою силою. Дія цієї сили викликає постійне затухання коливань. При малих швидкостях руху тіла, що знаходиться в коливальному русі затримуюча сила пропорційна швидкості руху:
Fзатр |
=−rv =−r x |
|
|
r- постійна величина для системи – коефіцієнт опору.
На систему діє квазіпружна та затримуюча сила, тоді другий закон Ньютона має вигляд:
mx = -kx - rx |
. (1) |
Поділимо на масу і отримаємо:
x = - mk x - mr x ,
+ |
k |
= ω2 |
; |
r |
= 2β , |
|
|
||||
|
m |
0 |
|
m |
|
|
|
|
|||
β - коефіцієнт затухання.
Маємо рівняння затухаючих коливань:
x = 2βx |
+ω2 x = 0 , (2) |
|
|
|
0 |
ω |
- величина власної частоти осцилятора. |
|
0 |
||
|
Так |
як затримуюча сила викликає постійне зменшення амплітуди коливань ( A = A(t) ), тоді |
розв’язок рівняння (2) будемо шукати:
x = A(t) cos( ωt +α) , |
(3) |
ω - частота затухаючих коливань, ω ¹ ω0 .
Продиференціюємо рівняння (3) і підставивши значення x, x, x у рівняння (2), отримаємо:
[A + 2βA + A(ω02 − ω 2 )]cos(ωt + α) = 2ω(A + βA)sin(ωt + α ) = 0 .
Дане рівняння виходить при будь-яких значеннях t, якщо один з коефіцієнтів при тригонометричних функціях дорівнює нулю, тобто:
|
|
(4) |
|
|
|
|
|
|
A +βA =0 , |
|
|
|
|
|
|
||
так як 2ω ¹ 0 , то можна скоротити, тоді: |
|
|
|
|
||||
|
|
2 |
2 |
) = 0 . (5) |
|
|
|
|
A + 2βA + A(ω0 −ω |
|
|
|
|
|
|||
З рівняння (4) |
знаходимо інші величини якщо |
dA |
= −βA , то |
dA |
= −βdt , |
|||
|
|
|
|
|
dt |
|
A |
|
A |
dA |
t |
A |
|
A |
|
−βt |
|
|
ò |
A |
= -β òdt Þ ln |
|
= -βt Þ |
|
= e |
|
. |
(6) |
A |
A |
|
|||||||
A |
|
0 |
0 |
|
0 |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
Із рівняння (6) знайдемо залежність амплітуди від часу:
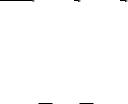
A(t) = A0 e−βt .
Знайдемо вираз для частоти ω : з рівняння (4) знаходимо:
A =−βA ;
|
|
|
2 |
A . |
|
|
A |
= −βA = −β(−βA) = β |
|
|
|||
|
Підставляємо в рівняння (6.3.5) і отримаємо: |
|||||
β 2 A − 2β 2 A = −A(ω02 −ω2 ) . |
|
|||||
|
Звідси, скоротивши на А, маємо: |
|
||||
|
|
|
|
|
|
|
β 2 |
= ω02 -ω2 Þ ω = |
ω02 - β 2 |
. |
(7) |
||
Дане рівняння використовують для реальної системи при умові, що відношення
β <ω0 .
r < k , тобто
2m m
При цих умовах, тобто при невеликому затуханні вільні затухаючі коливання описуються рівнянням:
x = A e−βt cos( ωt +α) . |
(8) |
0 |
|
Графік даної функції має вигляд:
Рис. 1
При значенні t=0 початкове зміщення x0 : x0 = A0 cos α ,
A0 і початкова фаза α задаються початковими умовами: x(0) = x0 .
x(0) = x0
Період затухаючих коливань: |
|
|
|
|
||||||||||
T = |
2π |
= |
|
2π |
|
= |
|
|
2π |
|
||||
ω |
|
|
|
|
|
|
|
|
|
|
||||
ω02 - β 2 |
k |
- |
r 2 . |
(9) |
||||||||||
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
m |
4m2 |
|
|
|||
Відношення значень амплітуд відповідає моментам часу, що відрізняються на величину періоду:
A(t) |
= eβT . |
|
A(t +T ) |
||
|
Це відношення – дикримент затухання, а логарифм даного відношення:
λ = ln |
A(t) |
= βT . |
|
A(t +T ) |
|||
|
|
Це відношення – логарифмічний дикримент затухання.
Знайдемо деякий час τ , по закінченні якого амплітуда коливань зменшується в e=2,72 раз. Скористаємось формулою (6):
A e−βt |
= eβτ = e , |
0 |
|
A e−β (t+τ ) |
|
0 |
|
тому, що τ = β1 , τ - час релаксації.
З урахуванням рівняння (10) знаходимо, що:

τ = Tλ .
Число коливань ( N e ) по закінченню яких амплітуда зменшується в e раз:
Ne = Tτ = λ1 . Величина
Q = |
π |
= |
π |
= Neπ |
(11) |
|
λ |
βT |
|||||
|
|
|
|
називають добротністю коливальної системи. Добротність пропорційна числу коливань, яке здійснює система за той час, по закінченню якого амплітуда зменшується в е раз.
6.3.2. Вимушені коливання Вимушеними називають коливання, які здійснюються під дією якоїсь зовнішньої сили, яка змінюється
в простому випадку по гармонійному закону:
Fx = Fm cos ωt .
Виникаючі при цьому коливання називають вимушеними. На дану частину тіла будуть діяти три сили: квазіпружна –kx, опору −rx , зовнішня вимушена сила Fx . З основного рівняння динаміки – другого
закону Ньютона:
mx = −kx −rx + Fm cos ωt . (12)
Або розділивши на масу Fmm = fm :
x + 2βx +ω02 x = fm cos ωt . (13)
Дослід показує, що по закінченню деякого часу, з початку дії вимушеної сили в системі встановлюється гармонічне коливання з частотою вимушеної сили, але які відстають по фазі від останнього
на величинуϕ . Таким чином:
x = Acos( ωt −ϕ) |
(14) |
|
|
|
Продиференціюємо рівняння (14) по часу і знайдемо швидкість і прискорення: |
||||
x = −Aωsin(ωt −ϕ) = Aωsin(ωt −ϕ + |
π ) |
. |
(15) |
|
|
|
2 |
||
x = −Aω2 cos(ωt −ϕ) = Aω2 cos(ωt −ϕ +π)
Підставимо вирази для початкового переміщення, швидкості і прискорення у рівняння (13). Сума трьох гармонічних функцій в лівій частині повинна дорівнювати силі f m cos ωt . Враховуючи фазові зміщення між початковим відхиленням, швидкістю і прискоренням, дане рівняння за допомогою векторної діаграми за умови, що ω <ω0 .
Рис. 2
Швидкість випереджає зміщення на величину π . Прискорення випереджає переміщення на величину π .
З даної діаграми за теоремою Піфагора слідує:
A2 (ω02 - ω 2 )2 + 4β 2 A2ω 2 = fm2 Þ |
|
||||
A = |
|
fm |
(16) |
||
|
|
|
. |
|
|
|
|
|
|
||
(ω02 - ω 2 )2 + 4β 2ω 2 |
|
||||
З даної діаграми також видно, що відставання переміщення по фазі від вимушеної сили:

tgϕ = |
2βω |
|
|
|
. |
(17) |
|
(ω02 − ω2 ) |
|||
Рівняння (16) і (17) показують, що амплітуда коливань і відставання зміщення по фазі на π |
|||
визначається властивостями |
самого осцилятора, тобто ω0 , β, f m ,ω але ніякими не початковими |
||
умовами. 6.3.3. Резонанс
Резонанс грає важливу роль в техніці.
Рис. 3
У даному випадку коефіцієнт затухання β1 < β2 < β3 . За даним графіком видно, що залежність амплітуди від частоти має максимум при частоті, яку можна знайти з умови ddAω = 0 . Дану частоту
називають резонансною частотою:
ωрез = 
 ω02 − 2β 2 . (18)
ω02 − 2β 2 . (18)
Існуючий максимум амплітуди, який при цьому виникає, називається явищем резонансу – різке збільшення амплітуди під дією вимушеної сили, а графіки називаються резонансними кривими. Вираз для амплітуди при резонансі знайдемо підставивши рівняння (18) у (16):
Amax = |
|
fm |
|
|
. (19) |
|
|
|
|
|
|||
2β |
ω02 |
− β 2 |
||||
|
|
|
Чим менше затухання системи, тим більше виражений резонанс. Явище резонансу використовується в техніці коли потрібно збільшити коливання, або коли роблять так, щоб їх взагалі не було.
Залежність базового зсуву ϕ від частоти ω може бути показана кривими:
Рис. 4
При слабкому затуханні ωрез ≈ω0 і значення фазового зсуву ϕ при резонансі практично дорівнює
π2 .
Намалюємо графік залежності середньої потужності вимушеної сили від частоти: