

Экзаменационный билет №1
-
Предмет статики. Задачи статики. Сила, точка, эквивалентные силы.
Введение в кинематику. Задачи кинематики.
1)Предмет статики. Задачи статики. Сила, точка и эквивалентные силы.
Статика-раздел механики, изучающая равновесие тел, находящиеся под действием внешней нагрузки.
Задачи статики :
1)Упрощение приложенных систем сил.
2)Установление условий равновесия системы тел.
Основные понятия статики :
Равновесием тел называется состояние покоя или движение с постоянной скоростью .
Материальной точкой называется тело, размерами которого можно пренебречь.Система материальных точек- совокупность материальных точек , взаимодействующих между собой.Абсолютно твердое тело-система материальных точек , расстояние между двумя любыми точками которого остается неизменным.Сила может быть сосредоточенной (т.е. приложенной к одной точке) и распределённой (действует на все точки данного объема или данной части поверхности)
Сила- величина векторная и её действие на тело определяется:
а)точкой приложения б)числовым значениемв)направлением
Прямая по которой направлена сила называют линией действия силы.Совокупность нескольких сил ,действующих на данное тело, называют системой сил. S1=(G,T,N) S2=(T,G)
Если силы ,действующие на тело или их линия действия сходятся в одной точке ,то такая система сил называется сходящейся .
Если силы или их линия действия параллельны ,то такая система сил называется параллельной. параллельная система сил
сходящаяся система силЕсли одну систему сил действующих на свободное тело можно заменить другой системой ,но изменяя при этом состояние покоя или движение в котором находится тело, то такие две системы сил называются эквивалентными.
Система сил под действием которой тело находится в равновесии называется уравновешенной или эквивалентны нулю.|F1|=|F2| {F1,F2)~0Если данная система сил эквивалента одной силе ,то эта сила называют равнодействующая данной системе .
2)Введение в кинематику. Задачи кинематики.
В кинематике изучается движение точки или тела независимо от причин вызывающих или изменяющих его, т. е. независимо от сил.Объектом изучения в кинематике являются: -материальная точка- тело конечной массы, геометрическая точка, размерами которого можно пренебречь. -механическая система - совокупность материальных точек
-абсолютно твердое тело - механическая система, расстояние, между точками которого не меняется.
Задачи кинематики:
а) задать движение материальной точки (системы) это значит дать способ определения положения точки (системы точек) в любой момент времени.
б) определение кинематических характеристик движения точки (скорость, ускорение) по заданному закону движения.
Экзаменационный билет №2
-
Аксиомы статики.
-
Теорема Кориолиса. Ускорение Кориолиса и его анализ.
Аксиомы статики
а) Аксиома о равновесии системы двух сил
Если на тело
действуют две силы ,то тело может
находиться в равновесии тогда и только
тогда ,когда эти силы равны по модулю,
лежат на одной прямой и направлены в
противоположные стороны.
 б)Аксиома
о добавлении(отбрасывании)системы сил
эквивалентной нулю.Действие
данной системы сил на тело не изменяется
,если к ней прибавить или от нее отнять
уравновешенную систему сил(т.е. систему
сил эквивалентную нулю).(F1,F2,F3,…Fn)~(
F1,F2,F3,…Fn(F1’,F2’))
, если {F1’,F2’}~0
б)Аксиома
о добавлении(отбрасывании)системы сил
эквивалентной нулю.Действие
данной системы сил на тело не изменяется
,если к ней прибавить или от нее отнять
уравновешенную систему сил(т.е. систему
сил эквивалентную нулю).(F1,F2,F3,…Fn)~(
F1,F2,F3,…Fn(F1’,F2’))
, если {F1’,F2’}~0
в) Аксиома параллелограмма сил
Равновесие тела
не изменится ,если две силы ,приложенные
к одной точке заменить одной силой
равной их геометрической сумме.{R}~{F1,F2}
R=F1+F2
R=
г) Аксиома равенства действия и противодействия
Всякому действию соответствует равное и противоположно направленное противодействие.
д) Аксиома отвердевания
Если деформированное тело находится под действием некоторой системы сил в равновесии, то равновесие не нарушается ,если это тело отвердеет ,т.е. станет абсолютно твердым.
Из этой аксиомы следует, что условие равновесия ,являющиеся необходимым и достаточным для абсолютно твердого тела, являются необходимыми, но не достаточными для деформируемого тела.Достаточные условия равновесия деформируемых тел устанавливается в курсе сопромата.
е) Аксиома связей
всякую связь можно отбросить и заменить её реакцией – силой или системой сил.Тело называется свободным, если его движение в пространстве ничем не ограничено. В противном случае тело называется несвободным. А тела, ограничивающие перемещение данного тела называются связями. Силы, с которыми связи действуют на данное тело называются реакциями связи. Т.е. связь-это ограничение, наложенное на движение тела.
Теорема о сложении ускорений (т.Кориолиса) Абсолютное ускорение точки равно векторной сумме относительного переносного и Кориолисово ускорение.
 Получим
теперь выражение для ускорения движущейся
точки.1)
Получим
теперь выражение для ускорения движущейся
точки.1)
2)


Сравнивая три формулы мы видим, что в выражении для абсолютного ускорения кроме переносного и относительного входит ещё одна группа слагаемых, которая называется кориолисовым ускорением.
 т.е.
т.е.

Экзаменационный билет №3
1/Основные виды связей и их реакций.
2/Системы отсчета.
Основные виды связей и их реакции.
а)Реакция гладкой поверхности направлена по нормали к этой поверхности(перпендикулярно общей касательной)
б) Опорная точка (ребро)
Реакция перпендикулярна опирающейся поверхности
в) Идеальная нить (гибкая, невесомая, нерастяжимая. Например, тросс, нить, канат ,цепь).
Реакция направлена по нити к точке подвеса.
г) Идеальный стержень (идеальный, жесткий на концах которого шарниры).Шарниром называют соединения, которые позволяют телам вращаться друг относительно друга .
Обозначение неподвижного обозначение подвижного шарнира
д) Для сферической поверхности реакция направлена перпендикулярна касательной или по радиусу
е) Жестко защемленная конструкция (консольная опора).
Любые перемещения точки крепления невозможны . Возникает момент препятствующий повороту .
Система отсчета.Пространство, в котором мы живем, является трехмерным. Это значит, что положение точки в нем характеризуется тремя числами. В двухмерном - двумя числами.
а)
прямоугольная система координат, в
которой тремя числами
 -
характеризующие положение точки,
являются дл
-
характеризующие положение точки,
являются дл б)
цилиндрическая, в которой тремя числами
б)
цилиндрическая, в которой тремя числами
 характеризуется
положение точки
характеризуется
положение точки
 является длины
является длины
 ,
угол фи, длина z.
,
угол фи, длина z.
в)сферическая,
в которой тремя числами
 характеристиками положения точкиМ0
является длина r
, углы
характеристиками положения точкиМ0
является длина r
, углы
 и фи.г)
прямоугольная, в которой двумя числами
и фи.г)
прямоугольная, в которой двумя числами
 характеризующие положение точкиM0
является
характеризующие положение точкиM0
является
 длины.
длины.
д)полярная,
в которой двумя числами
 характеризующие положение точкиМ0
является радиус
характеризующие положение точкиМ0
является радиус
 (радиус-вектор)
или расстояние от точки М0 до полюса О
и угол фи.Числа, определяющие положение
точки в некоторой системе координат,
называется координатными точками.
(радиус-вектор)
или расстояние от точки М0 до полюса О
и угол фи.Числа, определяющие положение
точки в некоторой системе координат,
называется координатными точками.
Экзаменационный билет №4
1.Система сходящихся сил. Равнодействующая системы сходящихся сил.2.Радиус-вектор. Траектория. V и ускорение точки1)Сходящиеся силы. Равнодействующая сходящихся сил.Система сходящихся сил- это такая система сил, в которой линии действия всех сил пересекаются в одной точке.ТеоремаСходящаяся система сил имеет равнодействующую, равную векторной сумме всех сил системы.
(F1,F2,F3,…Fn)-система
сходящихся сил. О- точку пересечения
линий действия этих сил ,то по аксиоме
(в) действие этой системы сил на абсолютно
твердое тело не изменится.Вывод
:Любую систему
сходящихся сил можно заменить
эквивалентной системой сил ,приложенных
в одной точке.Равнодействующая
системы сходящихся сил.а)
Пусть существует (F1,F2,F3…Fn)система
сходящихся сил. Применим аксиому
(в) =R.б)Правиломногоугольника.Применяя
последовательно правило параллелограмма
для двух сил системы можно вывести
правило многоугольника.R-равнодействующая
сходящихся сил Определяется замыкающей
стороной силового многоугольника,
построенного на исходных силах..в)3
силы не лежащие в одной плоскости имеют
равнодействующую построенную на этих
силах и являющуюся диагональю
параллелепипеда.система сил, приложены
в одной точке, эквивалентна одной силе
R,
равной геометрической сумме этих сил
и приложенных в той же точке.Условие
равновесия системы сходящихся сил.Пусть
на абсолютно твердое тело действует
система сходящихся сил. Тогда для
равновесия этой системы сил необходимо
и достаточно , чтобы равнодействующая
системы R
была равна 0.В проекциях на оси декартовых
координат условие равновесия представляют
так:Rx=
=R.б)Правиломногоугольника.Применяя
последовательно правило параллелограмма
для двух сил системы можно вывести
правило многоугольника.R-равнодействующая
сходящихся сил Определяется замыкающей
стороной силового многоугольника,
построенного на исходных силах..в)3
силы не лежащие в одной плоскости имеют
равнодействующую построенную на этих
силах и являющуюся диагональю
параллелепипеда.система сил, приложены
в одной точке, эквивалентна одной силе
R,
равной геометрической сумме этих сил
и приложенных в той же точке.Условие
равновесия системы сходящихся сил.Пусть
на абсолютно твердое тело действует
система сходящихся сил. Тогда для
равновесия этой системы сил необходимо
и достаточно , чтобы равнодействующая
системы R
была равна 0.В проекциях на оси декартовых
координат условие равновесия представляют
так:Rx= =0 (y,z)
т.е. для равновесия системы сходящихся
сил необходимо и достаточно, чтобы
сумма проекций всех сил на каждую из
осей координат была = 0 R=
=0 (y,z)
т.е. для равновесия системы сходящихся
сил необходимо и достаточно, чтобы
сумма проекций всех сил на каждую из
осей координат была = 0 R= 2)Положение
точки в пространстве удобно характеризовать
радиус-вектором. Если начало вектора
2)Положение
точки в пространстве удобно характеризовать
радиус-вектором. Если начало вектора
 (радиус-вектора) поместить в точку О,
то конец вектора опишет кривую наз.
годографом (записыватель пути) векторной
функции. Если t‒ время, то
(радиус-вектора) поместить в точку О,
то конец вектора опишет кривую наз.
годографом (записыватель пути) векторной
функции. Если t‒ время, то
 описывает характер движения материальной
точки. Если радиус-вектор разложить
по базисным векторам
описывает характер движения материальной
точки. Если радиус-вектор разложить
по базисным векторам
 прямоугольной
системыкоординат,
прямоугольной
системыкоординат,
Траектория - геометрическое место последовательных положений движущейся точки называется траекторией.
Скорость
Определяется
в момент времени t
радиус-вектором
 ,
который соединяет движущуюся точкуM с
центром О.Средняя скорость
,
который соединяет движущуюся точкуM с
центром О.Средняя скорость
 :
: вектор
скорости приложенных в точке М, направлен
в сторону ее движения, совпадает с
касательной к траектории в точке
М.Ускорение
точки
вектор
скорости приложенных в точке М, направлен
в сторону ее движения, совпадает с
касательной к траектории в точке
М.Ускорение
точки Ускорение
точки в момент времени
Ускорение
точки в момент времени
 наз/
наз/

Экзаменационный билет №5
-
Условие равновесия системы сходящихся сил.
-
Способы задания движения. Естественный способ задания движения. Определение скорости при естественном способе задания движения, касательное и нормальное ускорение.
1)Условие
равновесия системы сходящихся сил.
Пусть на
абсолютно твердое тело действует
система сходящихся сил. Тогда для
равновесия этой системы сил необходимо
и достаточно, чтобы равнодействующая
системы R
была равна нулю, т.е.
 - это условие равновесия в векторной
форме. В проекциях на оси декартовых
координат условие равновесия представляют
так:
- это условие равновесия в векторной
форме. В проекциях на оси декартовых
координат условие равновесия представляют
так:


 т.е.
для равновесия системы сходящихся сил
необходимо и достаточно, чтобы сумма
проекций всех сил на каждую из осей
координат была равна нулю. Для плоской
системы сил в проекциях будут только
два условия равновесия. Геометрическое
условие равновесия означает следующее:
поскольку для равновесия системы
сходящихся сил необходимо и достаточно,
чтобы равнодействующая равнялась нулю,
то необходимо и достаточно, чтобы
векторный многоугольник, построенный
на этих силах, как на сторонах, был
замкнут.2)
Пусть точка
движется вдоль простр. криволин.
траектории. При естественном способе
задания движения точки задают:а)
траекторию точки б) начало и направление
увеличения дуговой координаты в)
уравнение движения как функцию
времени.Положение точки на траектории
определяется расстоянием
т.е.
для равновесия системы сходящихся сил
необходимо и достаточно, чтобы сумма
проекций всех сил на каждую из осей
координат была равна нулю. Для плоской
системы сил в проекциях будут только
два условия равновесия. Геометрическое
условие равновесия означает следующее:
поскольку для равновесия системы
сходящихся сил необходимо и достаточно,
чтобы равнодействующая равнялась нулю,
то необходимо и достаточно, чтобы
векторный многоугольник, построенный
на этих силах, как на сторонах, был
замкнут.2)
Пусть точка
движется вдоль простр. криволин.
траектории. При естественном способе
задания движения точки задают:а)
траекторию точки б) начало и направление
увеличения дуговой координаты в)
уравнение движения как функцию
времени.Положение точки на траектории
определяется расстоянием
 -закон
изменения дуговой координат
-закон
изменения дуговой координат -
закон изменения расстояния. Можно найти
положение точки в любой момент времени
t
и получить значение S от начала отсчета
в ту или другую сторону. Пусть движение
точки задано естественным способом.
Положение точки М на кривой можно
описать радиус-вектором
-
закон изменения расстояния. Можно найти
положение точки в любой момент времени
t
и получить значение S от начала отсчета
в ту или другую сторону. Пусть движение
точки задано естественным способом.
Положение точки М на кривой можно
описать радиус-вектором
 .
.
Из определения скорости точки




 ;
;

Производная
 таким образом:
таким образом:
 Вектор ускорения
складывается на две составляющие –
касательное и нормальное
Вектор ускорения
складывается на две составляющие –
касательное и нормальное
 ;
;


Экзаменационный билет №6
-
Момент силы относительно точки.
-
Координатный и векторный способы задания движения. Скорость и ускорение.
1)Момент
силы относительно точки.
Для характеристики вращательного
движения под действием силы вводится
понятие момента силы относительно
точки.Моментом силы относительно точки
называется вектор
 равный векторному произведению
радиуса-вектора
равный векторному произведению
радиуса-вектора ,
соединяющего центр O с точкой приложения
силы точки А, на саму силу
,
соединяющего центр O с точкой приложения
силы точки А, на саму силу

 Момент
силы относительно центра в плоскости.Сила
F
в плоскости XOY.Момент
Момент
силы относительно центра в плоскости.Сила
F
в плоскости XOY.Момент
 направлен вдоль оси OZ.
направлен вдоль оси OZ. определяется численно удвоенной
площадью ∆ OAB.
определяется численно удвоенной
площадью ∆ OAB.
 Вычислим
Вычислим
 аналитически. Пусть заданы проекции
радиус-вектора
аналитически. Пусть заданы проекции
радиус-вектора
 и проекция силы
и проекция силы
 Раскроем
векторные произведения по формуле
векторной алгебры:
Раскроем
векторные произведения по формуле
векторной алгебры:


 2)
Координатный способ задания движения.Пусть
2)
Координатный способ задания движения.Пусть
 –
неподвижная декартовая система
координат. Можно задать значения
координат точки для каждого момента
времени.
–
неподвижная декартовая система
координат. Можно задать значения
координат точки для каждого момента
времени.
 Уравнение
движения точки в координатной форме.
Эти уравнения являются параметрическими
уравнениями траектории точки.Векторный
способ задания движения.Движение точки
при векторном способе изучения движения
задается радиус-вектором r этой точки.
Уравнение
движения точки в координатной форме.
Эти уравнения являются параметрическими
уравнениями траектории точки.Векторный
способ задания движения.Движение точки
при векторном способе изучения движения
задается радиус-вектором r этой точки.
 – векторное уравнение движения точки.
Пусть
– векторное уравнение движения точки.
Пусть
 задает движение точки М, тогда при
изменении t точка опишет кривую в
пространстве. Эта кривая является
траекторией точки.Скорость точки
направлена по касательной к траектории
и вычисляется по формуле
задает движение точки М, тогда при
изменении t точка опишет кривую в
пространстве. Эта кривая является
траекторией точки.Скорость точки
направлена по касательной к траектории
и вычисляется по формуле

Ускорение:

Экзаменационный билет №7
-
Момент силы относительно оси.
-
Поступательное движение твердого тела. Скорость и ускорение твердого тела.
1)
Момент
силы F относительно оси.Будем
называть проекцию на эту ось вектора
момента
 ,т.
е.
,т.
е.
 на
оси
на
оси
 .
С
помощью формулы момент силы относительно
оси можно вычислить, зная проекции силы
и координаты точки ее приложения.Зная
момент силы относительно осей
.
С
помощью формулы момент силы относительно
оси можно вычислить, зная проекции силы
и координаты точки ее приложения.Зная
момент силы относительно осей
 можно определить модуль момента силы
можно определить модуль момента силы





2)Поступательным движением твердого тела называется такое его движение, при котором любой отрезок, связанный с этим телом, сохраняет неизменное направление в пространстве.При поступательном движении все точки тела имеют в каждый момент времени одинаковые перемещения.Траектории, описываемые точками твердого тела, одинаковы. Теорема: При поступательном движении твердого тела траектории, скорости и ускорения всех точек тела одинаковы.Док-во: выберем две точки А и В твердого тела радиусы векторов этих точек удовлетворяют условию:
 Где
АВ=const. Продифференцируем это уравнение:
Где
АВ=const. Продифференцируем это уравнение:

 получим:
получим:
 Продифференцируем
по времени:
Продифференцируем
по времени:
 ;т.е.
;т.е.
 Уравнения
движения точки будут уравнениями
движения всего тела. Часто этой одной
точкой является центр масс твердого
тела. Движение точки в пространстве
описывается тремя независимыми
уравнениями:
Уравнения
движения точки будут уравнениями
движения всего тела. Часто этой одной
точкой является центр масс твердого
тела. Движение точки в пространстве
описывается тремя независимыми
уравнениями:

Для
плоского случая:

Поступательное движение не накладывает условий на уравнение движения, точки могут описывать какие угодно траектории—как прямолинейные, так и криволинейные. Основное свойство поступательного движения твердого тела определяется теоремой:
При поступательном движении твердого тела все его точки описывают одинаковые траектории и в каждый момент времени имеют одинаковые по величине и направлению скорости и ускорения.
Экзаменационный билет №8
-
Аналитический метод вычисления моментов силы относительно осей координат.
-
Вращательное движение тело вокруг неподвижной оси. Кинематические характеристики вращательного движения.
1)а)если
сила параллельна оси, то её момент
относительно этой оси равна нулю.F
// z
 =
0 б) если линия действия силы пересекает
оси, то её моменты относительно этих
осей также равны нулю.
=
0 б) если линия действия силы пересекает
оси, то её моменты относительно этих
осей также равны нулю.

 в)
если сила перпендикулярна к оси, например
к оси Y,
и кратчайшее расстояние между линией
действия силы и осью, например осью
x,равно
h,то
момент силы относительно оси х равен
произведению модуля силы на расстояние
между линией действия силы и осью.г)
если сила старается развернуть твердое
тело вокруг оси против хода часовой
стрелки относительно наблюдателя,
стоящего на этой оси, то момент силы
относительно этой оси положительный
рис.а); если по ходу часовой стрелки-
отрицательный.
в)
если сила перпендикулярна к оси, например
к оси Y,
и кратчайшее расстояние между линией
действия силы и осью, например осью
x,равно
h,то
момент силы относительно оси х равен
произведению модуля силы на расстояние
между линией действия силы и осью.г)
если сила старается развернуть твердое
тело вокруг оси против хода часовой
стрелки относительно наблюдателя,
стоящего на этой оси, то момент силы
относительно этой оси положительный
рис.а); если по ходу часовой стрелки-
отрицательный.
а) б)
б)
4.
Сложение
параллельных сил, приложенных к твердому
телу направленных в одну сторону.Найдем
равнодействующую 2х параллельных сил

 ,приложенных
в точке А и точке В твердого тела
,приложенных
в точке А и точке В твердого тела
Разложим
силу
 на 2 составляющие.Одну составляющую
на 2 составляющие.Одну составляющую
 направим вдоль линии действия
направим вдоль линии действия .Другую
.Другую
 найдем по модулю и направлению с помощью
силового треугольника Аналогично
найдем
найдем по модулю и направлению с помощью
силового треугольника Аналогично
найдем с
помощью силового треугольника
с
помощью силового треугольника
 и
и
 сходятся в точке О оба построения
соединим в таким образом, вместо системы
2-х сил
сходятся в точке О оба построения
соединим в таким образом, вместо системы
2-х сил 
 имеем эквивалентную из 4-(x)
сил
имеем эквивалентную из 4-(x)
сил 
 Найдем
равнодействующую из 4-х сил, так как
Найдем
равнодействующую из 4-х сил, так как
 равны по модулю и действуют вдоль одной
линии, противоположно направлены, то
они уравновешены и их сумма равна
нулю.Геометрическая сумма
равны по модулю и действуют вдоль одной
линии, противоположно направлены, то
они уравновешены и их сумма равна
нулю.Геометрическая сумма

Равнодействующая
2-х действующих на абсолютно твердое
тело параллельных сил, направленных в
одну сторону равна по модулю сумме
модулей слагаемых сил, им параллельна
и направлена в ту же сторону.Найдем
линию действия равнодействующей,
проведем через точку О прямую, параллельную
линиям действия слагаемых сил. Точку
пересечения этой прямой с АВ обозначим
С.Треугольник АСО подобен силовому
треугольнику, так как их стороны
параллельны. ∆
ВСО подобен Тогда 
 и
и 
 получим
получим
 Линия
действия равнодействующей 2-х действующих
на абсолютно твердое тело параллельных
сил, направленных в одну сторону,
проходят между точками приложения
слагаемых сил на расстояниях от этих
точек, обратно пропорционально модулям
этих сил.
Линия
действия равнодействующей 2-х действующих
на абсолютно твердое тело параллельных
сил, направленных в одну сторону,
проходят между точками приложения
слагаемых сил на расстояниях от этих
точек, обратно пропорционально модулям
этих сил.
2)
Вращением твердого тела вокруг
неподвижной оси называется такое его
движение, при котором две точки тела
остаются неподвижными в течение всего
времени движения. Неподвижными остаются
и все точки тела, расположенные на
прямой, проходящей через его неподвижные
точки. Эта прямая называется осью
вращения.Через
ось вращения проведем неподвижную
плоскость
 и подвижную П, скрепленную с вращающимся
телом. Тогда в момент времениt,
положение подвижной плоскости и,
следовательно твердого тела определяется
углом между плоскостями
и подвижную П, скрепленную с вращающимся
телом. Тогда в момент времениt,
положение подвижной плоскости и,
следовательно твердого тела определяется
углом между плоскостями
 (называется углом поворота тела). Угол
поворота измеряют в радианах. Если
известно число оборотов n за какой-то
промежуток времени, то угол поворота
равен:φ = 2πn/Положение
тела относительно выбранной системы
отсчета определяется в любой момент
времени ускорением.За
положительное направление отсчета
принимается вращение против часовой
стрелки. Траектории точек тела при его
вращении вокруг неподвижной оси является
окружность.Угловая скорость характеризует
быстроту и направление изменения угла
поворота в данный момент времени.
Величина угловой скорости равна первой
производной от угла поворота по времени:
(называется углом поворота тела). Угол
поворота измеряют в радианах. Если
известно число оборотов n за какой-то
промежуток времени, то угол поворота
равен:φ = 2πn/Положение
тела относительно выбранной системы
отсчета определяется в любой момент
времени ускорением.За
положительное направление отсчета
принимается вращение против часовой
стрелки. Траектории точек тела при его
вращении вокруг неподвижной оси является
окружность.Угловая скорость характеризует
быстроту и направление изменения угла
поворота в данный момент времени.
Величина угловой скорости равна первой
производной от угла поворота по времени:
ω
=
 Знак
производной определяет направление
вращения. Если ω > 0, то вращение
происходит против хода часовой
стрелки.Угловая скорость измеряется
в рад/сек, в технике угловая скорость
это частота вращения, выраженная в
об/мин.За 1 минуту тело повернется на
угол
Знак
производной определяет направление
вращения. Если ω > 0, то вращение
происходит против хода часовой
стрелки.Угловая скорость измеряется
в рад/сек, в технике угловая скорость
это частота вращения, выраженная в
об/мин.За 1 минуту тело повернется на
угол
 ,
если n- число оборотов в минуту.
,
если n- число оборотов в минуту.
 Угловое
ускорение характеризует быстроту и
направление изменения угловой скорости
в данный момент времени. Величина
углового ускорения равна первой
производной от угловой скорости по
времени или второй производной от угла
поворота по времени: ε =
Угловое
ускорение характеризует быстроту и
направление изменения угловой скорости
в данный момент времени. Величина
углового ускорения равна первой
производной от угловой скорости по
времени или второй производной от угла
поворота по времени: ε =
 Знак производной определяет направление
изменения угловой скорости.Если ε >0,
то угловое ускорение направлено против
хода часовой стрелки.Если ε<0 , то
угловое ускорение направлено по ходу
часовой стрелки. Размерность углового
ускорения (рад/с)Вектор
угловой скорости
— это вектор, направленный по оси
вращения в ту сторону, откуда оно видно
происходящим против часовой стрелки,
с модулем равным модулю угловой
алгебраической скорости
Знак производной определяет направление
изменения угловой скорости.Если ε >0,
то угловое ускорение направлено против
хода часовой стрелки.Если ε<0 , то
угловое ускорение направлено по ходу
часовой стрелки. Размерность углового
ускорения (рад/с)Вектор
угловой скорости
— это вектор, направленный по оси
вращения в ту сторону, откуда оно видно
происходящим против часовой стрелки,
с модулем равным модулю угловой
алгебраической скорости Вектор углового ускорения
Вектор углового ускорения
 Угловая
скорость и угловое ускорение можно
представить в виде векторов, которые
можно приложить к любой точке на оси
вращения, т.е. эти векторы являются
скользящими:
Угловая
скорость и угловое ускорение можно
представить в виде векторов, которые
можно приложить к любой точке на оси
вращения, т.е. эти векторы являются
скользящими:
 Направление
векторов угловых скорости и ускорения
определяются знаком производных.
Угловые скорости и угловые ускорения
являются главными кинематическими
характеристиками вращательного
движения и одинаковы для всех точек в
данный момент времени.
Направление
векторов угловых скорости и ускорения
определяются знаком производных.
Угловые скорости и угловые ускорения
являются главными кинематическими
характеристиками вращательного
движения и одинаковы для всех точек в
данный момент времени.
Экзаменационный билет №9
-
Сложения параллельных сил приложенных к твердому телу направленных в одну сторону.
-
Определения скоростей и ускорения точек вращающегося тела.
1) Равнодействующая 2-х действующих на абсолютно твердое тело параллельных сил, направленных в одну сторону равна по модулю сумме модулей слагаемых сил, им параллельна и направлена в ту же сторону.
 ;
;

2)
Т.к. траектории точек вращающегося тела
окружности, при определении скоростей
и ускорений удобно воспользоваться
естественным способом задания
движенияДуговая
координата определяющая положение
точки на траектории связана с углом
поворота и радиусом.

Для алгебраической скорости точки М

Модуль
скорости точки М


Вектор скорости направлен по касательной к траектории перпендикулярно радиусу.
Вектор скорости любой точки тела, вращающегося вокруг неподвижной оси равен по модулю произведению модуля скорости на кратчайшее расстояние от точки до оси и направлен в сторону вращения перпендикулярно к плоскости
Ускорение точки М




 — модуль ускорения
— модуль ускорения
Угол,
образованный вектором ускорения точки
М с радиусом окружности обозначим
 .
.
Из
формулы следует, что
 для всех точек тела одинаково.
для всех точек тела одинаково.
Экзаменационный билет №10
1.Сложения параллельных сил приложенных к твердому телу направленных в разные стороны (антипараллельные силы).
2.Векторные выражения скорости и ускорения точек вращающегося тела. Равномерное и неравномерное движения.
1)
Рассмотрим тело, на которое действуют
две параллельные силы
 направленные в противоположные стороны.
направленные в противоположные стороны.
Возьмем
на продолжении
BA
точку С. Приложим к ней две уравновешенные
силы R
и R’
//
 ,
так что
,
так что
 и
удовлетворялось равенство
и
удовлетворялось равенство
 Сложимсилы
Сложимсилы

т.е.
равна модулю

 и
и
 эквивалентна
0
и их можно отбросить.
эквивалентна
0
и их можно отбросить.
=>
 R-
равнодействующая.
R-
равнодействующая.
Равнодействующая 2-х антипараллельных сил равна по модулю разности модулей этих сил, им параллельна и направлена в сторону большей силы. Линия действия равнодействующей проходит вне отрезка соединяющего точку приложения слагаемых сил, на расстояниях от этих точек, обратно пропорционально модулям сил.
2)
Равномерным называется вращение, при
котором угловая скорость постоянна по
модулю и направлению.
 Откуда
Откуда

Равнопеременным
называют вращение, при котором угловое
ускорение постоянно по величине и
направлению
 .
Откуда
.
Откуда

Получим: Закон равнопеременного вращения.Если ω и ε имеют одинаковые знаки, то вращение равноускоренное ( рис.1 а). Скорость и вращательное ускорение направлены в одну сторону.
Если ω
и ε
имеют разные знаки. То вращение
равнозамедленное. Скорость и вращательное
ускорение направлены в разные стороны.
(рис. 1 б). Центростремительное ускорение
в обоих случаях направлено к оси
вращения.Модуль скорости точки
вращающегося тела равен
модулю векторного произведения
равен
модулю векторного произведения
 Направление
скорости совпадает векторного
произведения
Направление
скорости совпадает векторного
произведения
 Следовательно
Следовательно
 —
формула Эйлера
—
формула Эйлера
Для получения векторных формул для ускорений точек вращающегося тела продифференцируем это выражение по времени.

Экзаменационный билет №11
-
Пара сил и её момент. Теорема о моменте сил пары относительно произвольной точки.2.Плоскопараллельное движение твердого тела. Уравнение плоскопараллельного движения.
1)
Определение:Две равные, параллельные,
но противоположно направленные силы,
приложенные в разных точках тела, наз
парой
сил.
 ;
;
 -пара
сил
-пара
сил
Пара сил создает вращательное действие на тело.Пара сил характеризуется:1)плоскостью действия сил.2)направлением вращения пары сил в плоскости.3)момент пары сил- это численная характеристика вращательного действия.
Момент пары равен произведению одной из сил пары (модуля) на плечо пары, взятого с определенным знаком.
Плечо
пары
: кратчайшее расстояние(d)
между линиями действия сил, составляющих
пару.
Момент
пары сил положителен, если пары сил
стремится вращать объект в сторону
противоположную в ращению часовой
стрелки рис.а) и отрицательным, если в
сторону вращения часовой стрелки
рис.б)Вектор момента
M
пары

 направлен перпендикулярно к плоскости
действия пары сил в такую сторону, чтобы
смотря навстречу этому вектору, видеть
пару сил, стремящейся вращать плоскость
её действия в сторону, обратную вращения
часовой стрелкиТеорема о моменте сил
пары относительно произвольной
точки:Сумма моментов сил пары относительно
любой точки, лежащей в плоскости действия
пары равны моменту этой пары.
направлен перпендикулярно к плоскости
действия пары сил в такую сторону, чтобы
смотря навстречу этому вектору, видеть
пару сил, стремящейся вращать плоскость
её действия в сторону, обратную вращения
часовой стрелкиТеорема о моменте сил
пары относительно произвольной
точки:Сумма моментов сил пары относительно
любой точки, лежащей в плоскости действия
пары равны моменту этой пары.
 ,
,

2) Определение
Плоским движением твердого тела называется такое его движение, при котором каждая точка движется все время в одной и той же плоскости.Плоскости, в которых движутся отдельные точки ,параллельны между собой и параллельны одной и той же неподвижной плоскости.
Звенья большинства
машин и механизмов совершает
плоскопараллельное движение.Пусть
твердое тело совершает плоское движение
параллельной плоскостиПо .Тогда
любая прямая перпендикулярная к этой
плоскости и жестко связанное своими
точками с движущим телом будет двигаться
поступательно, то есть все точки будут
двигаться одинаково. Следовательно,
для изучения движения точек лежащих
на рассмотриваемой прямой достаточно
изучить движение одной точки М.
.Тогда
любая прямая перпендикулярная к этой
плоскости и жестко связанное своими
точками с движущим телом будет двигаться
поступательно, то есть все точки будут
двигаться одинаково. Следовательно,
для изучения движения точек лежащих
на рассмотриваемой прямой достаточно
изучить движение одной точки М.
Примерами плоскопараллельного движения служат:
1)скольжение стержня
2)качение цилиндра и т.д.
Положение плоской фигуры можно задать двумя координатами полюса и одним углом между отрезком жестко связанным с телом и направлением одной из неподвижных осей (х,у,z).Xа=xа(t),Yа=yа(t),Zа=zа(t) уравнения плоскопараллельного движения
Экзаменационный билет №12
1.Эквивалентность пар сил.
2.Определение скорости точек тело при плоском движении.
1) Сформулируем условия эквивалентности двух пар сил, используя наиболее общую характеристику пары сил - ее векторный момент.
Известно, что пару сил можно поворачивать и переносить в плоскости её действия. От этого действие пары сил на твердое тело не изменяется, если алгебраический момент пары сил, остается таким же.
Следовательно, векторный момент пары сил можно переносить параллельно самому себе в любую точку твердого тела, лежащую в плоском действии пары сил. Так как пару сил можно переносить в параллельную плоскость, то векторный момент пары сил можно переносить параллельно самому себе в любую точку тела, неизменяя действия пары сил на твердое тело.
Поэтому векторный момент пары сил, действующий на твердое тело, есть свободный вектор, т.е. он характеризуется только величиной и направлением, а точкой приложения у него может быть любая точка и, векторный момент пары сил не обязательно прикладывается посередине отрезка, соединяющего точки приложения сил пар.
2)
Теорема:
Ускорение
точки плоской фигуры равно сумме
ускорения полюса и ускорения данной
точки во вращательном движении вокруг
полюса.

Доказательство:

Дано:
 .
Ускорение точки В в её сложном движении:
.
Ускорение точки В в её сложном движении:

где относительное движение-вращение вокруг полюса А.
Переносное движение
– поступательное вместе с полюсом,


Экзаменационный билет №13
-
Приведение сил к центру.
-
Мгновенный центр скоростей. Способы нахождения мгновенного центра скоростей.
1) Рассмотрим систему состоящую из любого количества сил, как угодно расположенных в пространстве. Такую систему сил будем называть произвольной пространственной системой сил. Прежде чем перейти к её преобразованию, приведем вспомогательную теорему о параллельном переносе сил
Теорема: Силу, приложенную к абсолютно твердому телу, можно, не изменяя оказываемого его действия на тело, переносить параллельно ей самой в любую точку тела, добавляя при этом пару с моментом, равным моменту переносимой силы, относительно новой точки ее приложения.
Доказательство:
Пусть имеем силу F,
приложенную в точке А. Известно, что
силу, приложенную к твердому телу, можно
переносить вдоль её линии действия, от
чего действие силы на твердое тело не
изменяется. Теперь докажем, что силу
можно переносить на другую параллельную
линию действия. Но этот перенос, следует
компенсировать добавлением соответствующей
пары сил. Приложим в точку В, выбранной
за центр приведения, систему двух равных
по величине, но противоположных по
направлению сил
 и
и
 параллельных заданной силе
параллельных заданной силе
 .
Система сил
.
Система сил
 и
ее можно добавить к любой заданной
системе сил
и
ее можно добавить к любой заданной
системе сил
 .Тогда
.Тогда

 Система сил
Система сил
 называется
присоединенной парой. Итак вместо силы
F,
приложенной в точке А получена сила
F’,
равная ей по величине и направлению,
но приложенная в точке В и присоединенная
пара сил (F,
F’’)
векторный момент которой
называется
присоединенной парой. Итак вместо силы
F,
приложенной в точке А получена сила
F’,
равная ей по величине и направлению,
но приложенная в точке В и присоединенная
пара сил (F,
F’’)
векторный момент которой


В
A


 Процесс
замены силы
Процесс
замены силы
 силой
силой
 и парой сил (F,
F’’)
называется приведением силы
и парой сил (F,
F’’)
называется приведением силы
 к заданному центру.Итак, если
рассматривается система сил, то все
силы( пользуясь данной теоремой) можно
привести к некоторому центру – в этом
и состоит метод, предложенный Пуансо.
к заданному центру.Итак, если
рассматривается система сил, то все
силы( пользуясь данной теоремой) можно
привести к некоторому центру – в этом
и состоит метод, предложенный Пуансо.
Луи Пуансо (1777-1859 г.) французский математик, механик, автор геометрической статики (1803 г.). Ввел в механику понятие момента силы, пары сил, разработал теорию пар и метод приведения системы сил. Много сделал в кинематике, динамике.
2) Мгновенным центром скоростей (МЦС) называется точка Р плоской фигуры, скорость которой в данный момент времени равна нулю. Рассмотрим теперь различные случаи определения положения МЦС.
1.
Способ нахождения МЦС по известной
скорости некоторой точки плоской фигуры
и по ее угловой скорости был рассмотрен
выше. 2. Если известны направления
скоростей двух точек плоской фигуры
 A
и
A
и
 B,
и эти скорости не параллельны друг
другу, то для нахождения МЦС необходимо
из точек А
и В
восставить к этим скоростям перпендикуляры
до их пересечения (рис. 5, а). При этом
B,
и эти скорости не параллельны друг
другу, то для нахождения МЦС необходимо
из точек А
и В
восставить к этим скоростям перпендикуляры
до их пересечения (рис. 5, а). При этом
ω=
 =
=
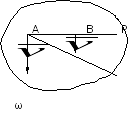
3. Если
скорости двух точек плоской фигуры
 A
и
A
и
 B
параллельны друг другу и перпендикулярны
отрезку АВ, то для нахождения МЦС
используется условие пропорциональности
модулей скоростей точек расстояниям
от этих точек до МЦС, что реализуется
при построениях, ясных из рис. 5, б и рис.
5, в.
B
параллельны друг другу и перпендикулярны
отрезку АВ, то для нахождения МЦС
используется условие пропорциональности
модулей скоростей точек расстояниям
от этих точек до МЦС, что реализуется
при построениях, ясных из рис. 5, б и рис.
5, в.



A
 А
А
P
 В
В

B
ω
a)
б)
в)
Рис.5

ω=0 ω=0 Рис.6
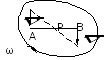
4. Если
при этом окажется, что
 А
=
А
=
 B
(рис.6, а), или если скорости двух точек
плоской фигуры
B
(рис.6, а), или если скорости двух точек
плоской фигуры
 А
и
А
и
 B
параллельны друг другу и не перпендикулярны
отрезку АВ
(рис. 6, б), то МЦС располагается в
бесконечности. При этом угловая скорость
тела
B
параллельны друг другу и не перпендикулярны
отрезку АВ
(рис. 6, б), то МЦС располагается в
бесконечности. При этом угловая скорость
тела
ω = 0, а скорости всех точек тела векторно равны. Это случай мгновенно поступательного движения.
5. При качении какого-либо тела (например, колеса) по неподвижной поверхности (рис. 6, в) положение МЦС определяется из условия отсутствия взаимного проскальзывания (т. е. равенства скоростей соприкасающихся точек). МЦС — это точка соприкосновения тела с поверхностью.
Экзаменационный билет №14
-
Приведение системы сил произвольно расположенных к силе и паре сил.2.Мгновенный центр ускорения. Способы нахождения мгновенного центра ускорений.
1) Теорема: Любую произвольную систему сил, действующих на твердое тело, можно в общем случае привести к силе и паре сил. При этом сила равна главному вектору системы сил и приложена в центре приведения, а пара имеет момент равный главному моменту системы сил, относительно центра приведения.
Доказательство:
Пусть дана произвольная система сил
 - приложенная к твердому телу.
- приложенная к твердому телу.

Выберем произвольную
точку О за центр приведения и каждую
силу заданной системы сил приведем к
точке О, добавляя при каждом переносе
присоединенную пару с моментом, равным
моменту данной силы, относительно точки
О. Таким образом система из n
сил заменена системой из 3n
сил, т.е. в точке О приложена система
сходящихся сил
 и на твердое тело действует система n
присоединенных пар сил
и на твердое тело действует система n
присоединенных пар сил
 Векторный
момент присоединенных пар сил можно
выразить через векторные моменты
заданных сил
Векторный
момент присоединенных пар сил можно
выразить через векторные моменты
заданных сил
 Образованную
в точке О систему сходящихся сил
Образованную
в точке О систему сходящихся сил
 .Заменим
одной силой, их равнодействующей, равной
векторной сумме
.Заменим
одной силой, их равнодействующей, равной
векторной сумме
 ~ R
или
~ R
или

Геометрически изображается замыкающим вектором силового многоугольника, построенного на этих силах.
Для системы
сходящихся сил
 сила R
– равнодействующая .Для заданной
системы сил
сила R
– равнодействующая .Для заданной
системы сил
 сила R
– векторная сумма или главный вектор2)
Мгновенным центром ускорений (МЦУ)
называется точка Q плоской фигуры,
ускорение которой в данный момент
времени равно нулю: aQ=0.
Если выбрать в качестве полюса МЦУ , то
теорема о сложении ускорений дает
сила R
– векторная сумма или главный вектор2)
Мгновенным центром ускорений (МЦУ)
называется точка Q плоской фигуры,
ускорение которой в данный момент
времени равно нулю: aQ=0.
Если выбрать в качестве полюса МЦУ , то
теорема о сложении ускорений дает
 .Ускорение точек плоской фигуры- это
их ускорения в относительном вращении
фигуры вокруг мгновенного центра
ускорений.
.Ускорение точек плоской фигуры- это
их ускорения в относительном вращении
фигуры вокруг мгновенного центра
ускорений.
Согласно формуле, получим для модуля ускорения точки плоской фигуры соотношение:

Экзаменационный билет №15
1.Главный вектор, главный момент сил. Вычисления главного вектора и главного момента сил.
2.Определение ускорение точек тело при плоском движении.
1)
а) Главный вектор.Для
любой системы сил
 главным вектором системы сил называется
вектор, равный сумме этих сил:
главным вектором системы сил называется
вектор, равный сумме этих сил:
 Главный
вектор геометрически изображается
замыкающей силового многоугольника,
построенного на заданных силах.
Главный
вектор геометрически изображается
замыкающей силового многоугольника,
построенного на заданных силах.
Проектируя обе части векторного равенства на координате оси, для произвольной, пространственной системы сил получаем:



По проекциям определяем величину главного вектора и косинусы углов с осями координат.

 (xz)
(xz)
Для плоской системы
сил, если выбрать ось OZ
 плоскости действия сил, то главный
вектор R
лежит в плоскости OXY
и следовательно
плоскости действия сил, то главный
вектор R
лежит в плоскости OXY
и следовательно


 ;
;


б) Главный момент сил.
Систему присоединенных
пар сил

 можно по теореме о сложении пар сил
заменить одной парой сил
можно по теореме о сложении пар сил
заменить одной парой сил с векторным моментом.
с векторным моментом.
 ,
, -называется
главным моментом.
-называется
главным моментом.
Главный момент
 равен сумме векторных моментов
присоединенных пар
равен сумме векторных моментов
присоединенных пар


Индекс 0 у величины главного момента означает, что за центр приведения взята точка 0.
Итак, главный момент системы сил является вектором, замыкающим векторный многоугольник, образованный при сложении векторных моментов сил системы относительно выбранного центра

Проектируя обе части векторного равенства на прямоугольные оси координат и используя связь момента силы относительно оси с проекциями векторного момента этой силы относительно точки на оси, имеем:



Величина главного
момента и косинусы его углов с осями
координат




Для плоской системы
сил, если ось OZ
 плоскости действия сил ось OX,
OY
в плоскости действия сил. Главный момент
плоской системы сил
плоскости действия сил ось OX,
OY
в плоскости действия сил. Главный момент
плоской системы сил
 главному вектору и параллелен оси OZ;
главному вектору и параллелен оси OZ;

2) Теорема: Ускорение точки плоской фигуры равно сумме ускорения полюса и ускорения данной точки во вращательном движении вокруг полюса.
Доказательство:
Дано:
 .
Ускорение точки В в её сложном движении:
.
Ускорение точки В в её сложном движении:

где относительное движение-вращение вокруг полюса А.
Переносное
движение – поступательное вместе с
полюсом,


Экзаменационный билет №17
-
Теорема Пуансо. Основные теория статики.
-
Теорема о сложении скоростей.
1) Осн теор статики (теорема Пуансо): Всякую пространственную систему сил в общем случае можно заменить эквивалентной системой, состоящей из одной силы, прило женной в какой-либо точке тела (центре приведения) и равной глав ному вектору данной системы сил, и одной пары сил, момент которой равен главному моменту всех сил относительно выбранного центра приведения.
2) При сложном движении точки абсолютная скорость точки равна векторной сумме относительной и переносной скорости.

Доказательство: Пусть o1, x1, y1, z1 – неподвижная система отсчета; o, x, y, z – подвижная система отсчета.x, y, z- координаты движущейся точки М в подвижной системе отсчета; r, r0-радиус-векторы точек М и О в неподвижной системе отсчета; ρ - радиус-вектор точки М в подвижной системе отсчета.
из
рисунка
i,j,k-орты подвижной системы
перейдем к записи для выражения скоростей:


Экзаменационный билет №18
-
Главный вектор, главный момент системы сил. Формулы для их вычисления.
-
Теорема о сложении ускорений.
1) а) Главный вектор.
Для любой системы
сил
 главным вектором системы сил называется
вектор, равный сумме этих сил:
главным вектором системы сил называется
вектор, равный сумме этих сил:
 Главный
вектор геометрически изображается
замыкающей силового многоугольника,
построенного на заданных силах.
Главный
вектор геометрически изображается
замыкающей силового многоугольника,
построенного на заданных силах.
Проектируя обе части векторного равенства на координате оси, для произвольной, пространственной системы сил получаем:



По проекциям определяем величину главного вектора и косинусы углов с осями координат.


Для плоской системы
сил, если выбрать ось OZ
 плоскости действия сил, то главный
вектор R
лежит в плоскости OXY
и следовательно
плоскости действия сил, то главный
вектор R
лежит в плоскости OXY
и следовательно



 ;
;
б) Главный момент сил.
Систему присоединенных
пар сил

 можно по теореме о сложении пар сил
заменить одной парой сил
можно по теореме о сложении пар сил
заменить одной парой сил с векторным моментом.
с векторным моментом.
 ,
, -называется
главным моментом.
-называется
главным моментом.
Главный момент
 равен сумме векторных моментов
присоединенных пар
равен сумме векторных моментов
присоединенных пар


Индекс 0 у величины главного момента означает, что за центр приведения взята точка 0.
Итак, главный момент системы сил является вектором, замыкающим векторный многоугольник, образованный при сложении векторных моментов сил системы относительно выбранного центра

Проектируя обе части векторного равенства на прямоугольные оси координат и используя связь момента силы относительно оси с проекциями векторного момента этой силы относительно точки на оси, имеем:



Величина главного
момента и косинусы его углов с осями
координат




Для плоской системы
сил, если ось OZ
 плоскости действия сил ось OX,
OY
в плоскости действия сил. Главный момент
плоской системы сил
плоскости действия сил ось OX,
OY
в плоскости действия сил. Главный момент
плоской системы сил
 главному вектору и параллелен оси OZ;
главному вектору и параллелен оси OZ;

2) Абсолютное ускорение точки равно векторной сумме относительного переносного и Кориолисово ускорение.

Получим теперь выражение для ускорения движущейся точки.
1)
2)

3)
Сравнивая три формулы мы видим, что в выражении для абсолютного ускорения кроме переносного и относительного входит ещё одна группа слагаемых, которая называется кориолисовым ускорением.
 т.е.
т.е.

Справка: Густав Кориолис (1792-1843) французский механик, описывающий сложное движение точки. Основные его работы, относятся к аналитической механике и динамике машин. Ввел коэффициент ½ в кинетическую энергию.
Экзаменационный билет №19
-
Условие равновесия произвольной пространственной системы сил. Условия равновесия системы параллельных сил.
-
Теорема Кориолиса. Ускорение Кориолиса и его анализ.
1) Условие равновесия пространственной системы сил.
Произвольной пространственной системой сил называется система сил линии действия которых не лежат в одной плоскости.
Согласно основной теоремы статики (теореме Пуансо), любую произвольную систему сил, действующих на твердое тело, можно заменить эквивалентной системой, состоящей из силы (главного вектора системы) и пары сил (главного момента сил).
Отсюда вытекает условие равновесия произвольной пространственной системы сил:
В геометрической форме: для равновесия произвольной пространственной системы сил необходимо и достаточно, чтобы главный вектор и главный момент системы равнялись нулю.

В аналитической форме: для равновесия произвольной пространственной системы сил необходимо и достаточно, чтобы суммы проекций всех сил на три координатные оси и суммы моментов всех сил относительно этих осей были равны нулю.



Условие равновесия могут быть использованы для решения задач на равновесие при определении неизвестных величин (реакций связей).
Чтобы задача была статистически определимой, число неизвестных должно быть не более 6.
В частности для системы параллельных сил условиями равновесия являются следующие равенства:



2) Теорема о сложении ускорений (т.Кориолиса)
Абсолютное ускорение точки равно векторной сумме относительного переносного и Кориолисово ускорение.

Получим теперь выражение для ускорения движущейся точки.
1)
2)

3
Сравнивая три формулы мы видим, что в выражении для абсолютного ускорения кроме переносного и относительного входит ещё одна группа слагаемых, которая называется кориолисовым ускорением.
 т.е.
т.е.

Экзаменационный билет №20