

Лекция 4
Краткое содержание: Понятие о динамической модели машины. Параметры динамической модели. Уравнения движения динамической модели. Режимы движения машинного агрегата. Установившийся режим движения машины. Неравномерность движения и методы ее регулирования. Коэффициент неравномерности. Маховик и его роль в регулировании неравномерности движения.
Контрольные вопросы.
Понятие о динамической модели машины.
Прямая задача динамики машины, как отмечалось и ранее, является задачей по определению закона движения механической системы под действием заданных внешних сил. При решении этой задачи параметры машинного агрегата и действующие на него внешние силы известны, необходимо определить закон движения: скорости и ускорения в функции времени или обобщенной координаты. Иначе эту задачу можно сформулировать так: заданы управляющие силы и силы внешнего сопротивления, определить обеспечиваемый ими закон движения машины. Для решения этой задачи используются уравнения энергетического равновесия - закон сохранения энергии. Для идеальной механической системы, в которой нет потерь энергии и звенья абсолютно жесткие, этот закон можно применять в виде теоремы об изменении кинетической энергии. Согласно этой теореме работа всех внешних сил действующих на систему расходуется только на изменение ее кинетической энергии. При этом потенциальные силы - силы веса рассматриваются как внешние:
![]()
где
T - изменение
кинетической энергии системы, T
- текущее
значение кинетической энергии системы,
Tнач
-начальное значение кинетической энергии
системы,
![]() - суммарная работа внешних сил, действующих
на систему.
- суммарная работа внешних сил, действующих
на систему.
Рассмотрим сложную
механическую систему (рис.8.1), состоящую
из n
подвижных звеньев, из которых r
- звеньев совершают вращательное
движение,
j - плоское,
k -
поступательное. Основная подвижность
системы равна W=1.
На систему действуют: f
- внешних сил и m
- внешних моментов. Движение этой системы
определяется изменением одной независимой
обобщенной координаты. Такую систему
при решении задач динамики можно заменить
более простой динамической
моделью или условным звеном, закон
движения которого полностью совпадает
с законом движения одного из звеньев
механизма.
Положение этого звена (иногда его
называют звеном приведения) определяется
обобщенной координатой, а динамические
параметры заменяются: инерционные -
суммарным приведенным моментом инерции
![]() ,
силовые - суммарным приведенным моментом
Мпр
. Эти
параметры динамической модели
рассчитываются по критериям подобия
модели и объекта, которые определяются
соответственно из условий:
,
силовые - суммарным приведенным моментом
Мпр
. Эти
параметры динамической модели
рассчитываются по критериям подобия
модели и объекта, которые определяются
соответственно из условий:
![]() ,
,
![]() ,
то есть: работа приведенного момента
равна сумме работ моментов и сил,
приложенных к звеньям механизма,
кинетическая энергия динамической
модели равна сумме кинетических энергий
звеньев механизма.
,
то есть: работа приведенного момента
равна сумме работ моментов и сил,
приложенных к звеньям механизма,
кинетическая энергия динамической
модели равна сумме кинетических энергий
звеньев механизма.
|
|
|
Рис 4.1 |
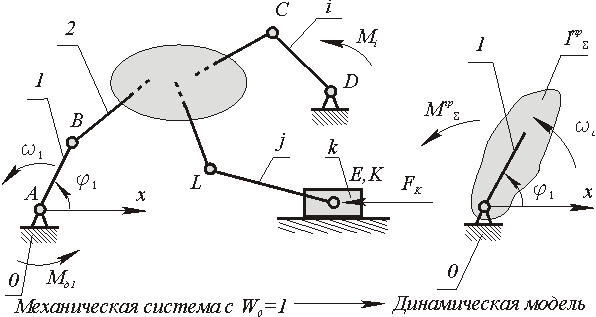
Параметры динамической модели машины
Рассмотрим
изображенную на рис. 4.1 механическую
систему и ее динамическую модель.
Равенство работ
![]() можно рассматривать как равенство
мощностей
можно рассматривать как равенство
мощностей
![]() (для идеальных механизмов).
(для идеальных механизмов).
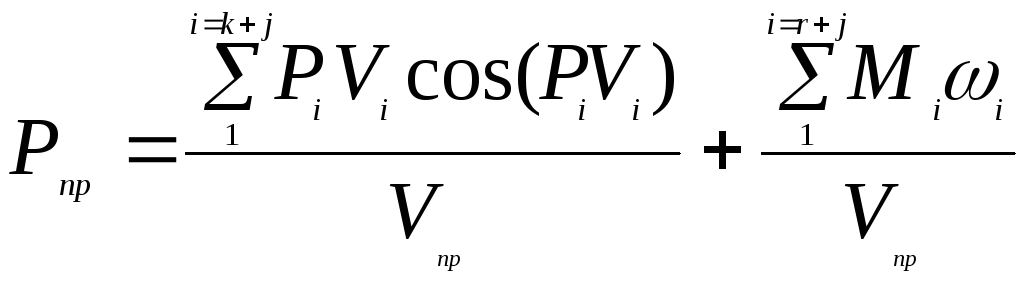
Суммарная мощность внешних сил:
-
для механической системы:
![]()
-
для модели:
![]() или
или
![]() ,
,
где Vпр – скорость точки приложения приведенной силы.
Из уравнения для правых частей получаем формулы для определения приведенного момента динамической модели
![]()

и приведенной силы динамической модели
Запишем для них уравнение изменения кинетической энергии. Кинетическая энергия:
-
для механической системы

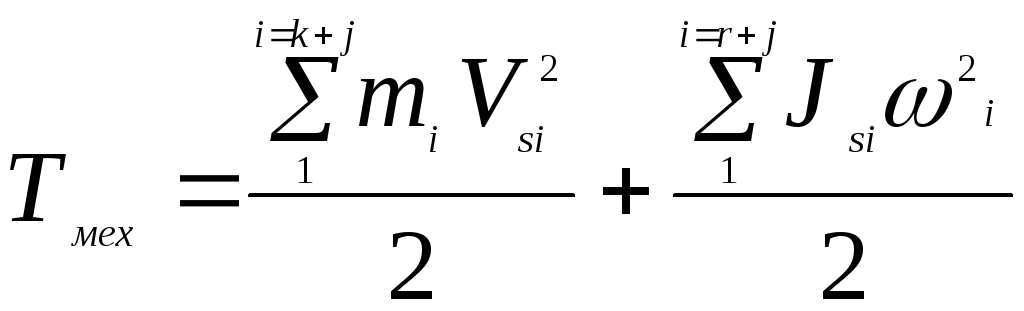
-
для модели
![]() или
или
![]()
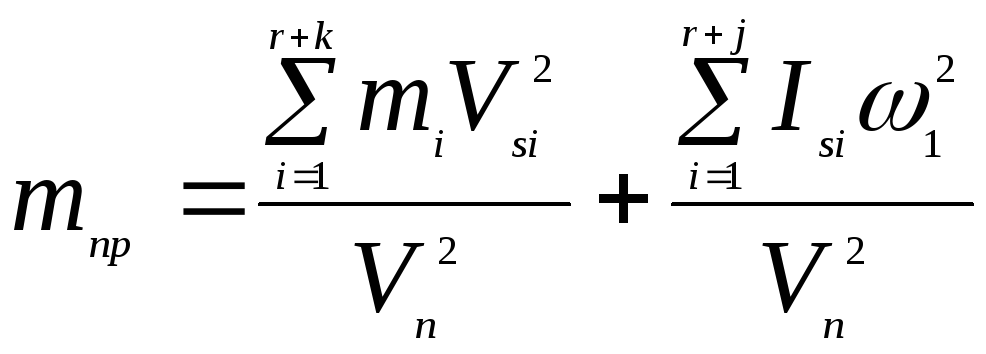
![]()
![]()
Приведенной массой mnр – будет некоторая условная масса, сосредоточенная в точке п, кинетическая энергия которой в каждом рассматриваемом положении равна кинетической энергии всех его звеньев:
Приведенным моментом инерции Inр называется момент инерции, вращающийся вместе со звеном 1, кинетическая энергия которого в каждой рассматриваемом положении механизма равна сумме кинетических энергий всех звеньев.
