

25. Построение диаграммы статической остойчивости с использованием пантокарен.
Для
рассматриваемого судна плечо статической
остойчивости l
зависит отD,
zg
,![]() , то есть является функцией трёх
параметров. С целью упрощения расчётов
плечоlудобно
представить как разность двух величин,
но каждая из них уже зависит от двух
параметров. Из рис. 24 видно, что:
, то есть является функцией трёх
параметров. С целью упрощения расчётов
плечоlудобно
представить как разность двух величин,
но каждая из них уже зависит от двух
параметров. Из рис. 24 видно, что:
![]() (45).
(45).
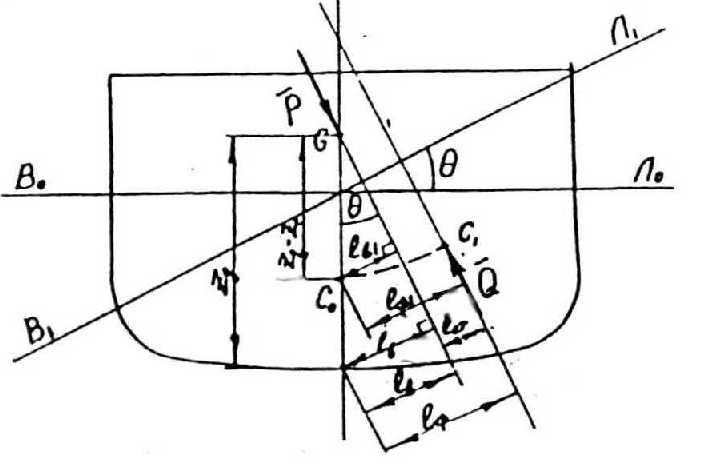
Рис.
24. Плечо
формы.
Возможно представление плеча lв виде разности или суммы других величин, если принять точкуCo или m, относительно которой измерять плечо формы.
Очевидно,
что lфдля рассматриваемого судна зависит отD (илиV=D/![]() )
и
)
и ![]() .
.
На
основе соответствующих расчётов, обычно
выполняемых на ЭВМ, эта зависимость
может быть представлена графически и
для фиксированных значений
![]() строят графикиlф(V)
, как это показано на рис.25. Эти
кривые называются интерполяционными
кривыми плеч остойчивости формы
(пантокаренами). С помощью этих кривых
для любого водоизмещения можно определить
плечи формы для фиксированных углов
крена (10о, 20о, 30о, 40о,
50о, 60о, 70о). Плечи
статической остойчивостиlдля этих углов крена можно определить,
если изlфвычестьzg*sin
строят графикиlф(V)
, как это показано на рис.25. Эти
кривые называются интерполяционными
кривыми плеч остойчивости формы
(пантокаренами). С помощью этих кривых
для любого водоизмещения можно определить
плечи формы для фиксированных углов
крена (10о, 20о, 30о, 40о,
50о, 60о, 70о). Плечи
статической остойчивостиlдля этих углов крена можно определить,
если изlфвычестьzg*sin![]() .
Эти вычисления удобно выполнять в
табличной форме. После этого полученные
значенияlоткладывают перпендикулярно осиO
.
Эти вычисления удобно выполнять в
табличной форме. После этого полученные
значенияlоткладывают перпендикулярно осиO![]() через 10ов систем координатlO
через 10ов систем координатlO![]() Точки соединяют плавной кривой,
получая диаграмму статической остойчивости
(рис.21).
Точки соединяют плавной кривой,
получая диаграмму статической остойчивости
(рис.21).
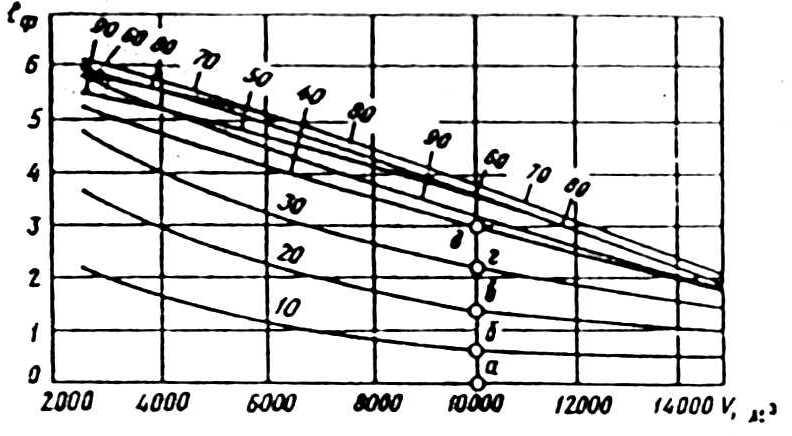
Рис.25. Пантокарены
26.Построение диаграммы статической остойчивости по универсальной диаграмме.
Д
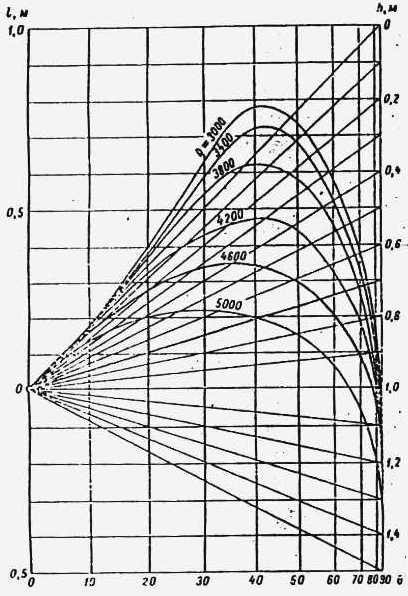
Рис.26.
Универсальная диаграмма статической
остойчивости.![]() , как указано выше, Если кривые водоизмещения
не соответствуют водоизмещению
рассматриваемого случая загрузки, то
интерполируя интервал между ближайшими
водоизмещениями проводится вспомогательная
кривая или откладываются соответствующие
точки на углах крена кратных 10.
, как указано выше, Если кривые водоизмещения
не соответствуют водоизмещению
рассматриваемого случая загрузки, то
интерполируя интервал между ближайшими
водоизмещениями проводится вспомогательная
кривая или откладываются соответствующие
точки на углах крена кратных 10.
27. Динамическая остойчивость. Диаграмма динамической остойчивости. Динамический угол крена.
Ранее мы рассматривали постепенное приложение кренящего момента. При таком действии момента судно получает пренебрежимо малые скорости и ускорения, что позволяет решать задачи в статической постановке.
Значительный практический интерес представляют задачи, в которых кренящий момент возрастает до наибольшего значения практически мгновенно, то есть за время, значительно меньшее времени наклонения судна.
Б
Рис.27.
Действие динамического момента. 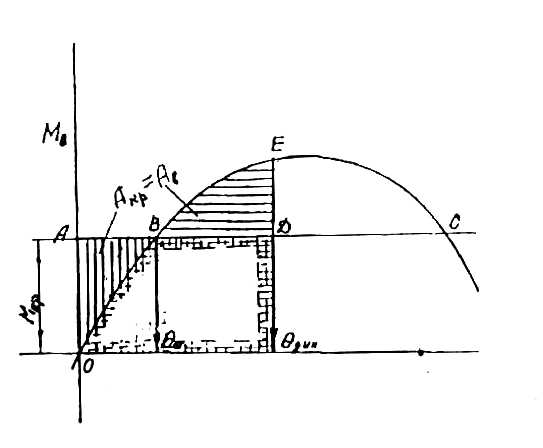
![]() (рис.27). При углах крена <
(рис.27). При углах крена <![]() Mкр>Mв
поэтому судно будет увеличивать
скорость наклонения и, следовательно,
кинетическую энергию. При
Mкр>Mв
поэтому судно будет увеличивать
скорость наклонения и, следовательно,
кинетическую энергию. При![]() уже восстанавливающий момент больше
кренящего и, следовательно, скорость и
кинетическая энергия будут уменьшаться
до некоторого угла
уже восстанавливающий момент больше
кренящего и, следовательно, скорость и
кинетическая энергия будут уменьшаться
до некоторого угла![]() , при котором угловая скорость
и кинетическая энергия будут равны
нулю. Наибольший угол
, при котором угловая скорость
и кинетическая энергия будут равны
нулю. Наибольший угол![]() ,
на который наклоняется судно при
внезапном приложении момента, называетсядинамическим углом крена.
,
на который наклоняется судно при
внезапном приложении момента, называетсядинамическим углом крена.
Для
определения
![]() воспользуемся теоремой об
изменении кинетической энергии, в
соответствии с которой изменение
кинетической энергии равно работе всех
сил действующих на систему (из теоретической
механики).
воспользуемся теоремой об
изменении кинетической энергии, в
соответствии с которой изменение
кинетической энергии равно работе всех
сил действующих на систему (из теоретической
механики).
При
![]() =0
и при
=0
и при![]() ( при наибольшем наклонении)
кинетическая энергия равна нулю, так
как скорость =0.. Из этого следует, что
при
( при наибольшем наклонении)
кинетическая энергия равна нулю, так
как скорость =0.. Из этого следует, что
при![]() суммарная работа кренящего и
восстанавливающего моментов =0, а по
модулю работа восстанавливающего
момента Ав равна
работе кренящего моментаАкр(так как они имеют противоположный
знак). Таким образом, для определения
суммарная работа кренящего и
восстанавливающего моментов =0, а по
модулю работа восстанавливающего
момента Ав равна
работе кренящего моментаАкр(так как они имеют противоположный
знак). Таким образом, для определения![]() нужно найти угол крена, при
которомАв=Акр.
нужно найти угол крена, при
которомАв=Акр.
Элементарная
работа момента dA=M*d![]() (из теоретической механики). Работа
при конечном угле поворота (от
(из теоретической механики). Работа
при конечном угле поворота (от![]() =0
до
=0
до ![]() )
равна:
)
равна:
![]() (46)/
(46)/
Следовательно,
работа момента численно равна площади
под графиком момента. Работа кренящего
момента Мкрравна
площади под графиком момента. Работа
восстанавливающего момента равна
площадиОВЕ![]() .
Если эти площади будут равны, то работы
моментов будут равны и угол, при котором
равны моменты и будет искомым углом
динамического равновесия -
.
Если эти площади будут равны, то работы
моментов будут равны и угол, при котором
равны моменты и будет искомым углом
динамического равновесия -![]() .Площадь трапецииОВD
.Площадь трапецииОВD![]() общая для площадей изображающих работу
моментовМкриМв.Поэтому для равенства работ и определения
общая для площадей изображающих работу
моментовМкриМв.Поэтому для равенства работ и определения![]() достаточно равенства заштрихованных
горизонтально и вертикально площадей( ОАВ и ВЕD,рис.27).
достаточно равенства заштрихованных
горизонтально и вертикально площадей( ОАВ и ВЕD,рис.27).
Таким
образом, для того, чтобы определить
![]() при заданномМкр, ищем такое положение вертикалиED
, при котором горизонтально и
вертикально заштрихованные плошади
равны. Следует обратить внимание на то,
что
при заданномМкр, ищем такое положение вертикалиED
, при котором горизонтально и
вертикально заштрихованные плошади
равны. Следует обратить внимание на то,
что![]() больше
больше![]() более, чем в два раза.
более, чем в два раза.
При
визуальном определении площадей
диаграммы возможны погрешности, которые
приводят к неточности при определении
![]() .
.
Динамический
угол крена
![]() определяется из условия равенства работ
кренящегоАкри
восстанавливающего моментовАв. Поэтому, если построить графики этих
работ, то точка пересечения графиков
соответствует равенству этих работ
(Акр= Ав)
и, следовательно, позволяет более точно
определить
определяется из условия равенства работ
кренящегоАкри
восстанавливающего моментовАв. Поэтому, если построить графики этих
работ, то точка пересечения графиков
соответствует равенству этих работ
(Акр= Ав)
и, следовательно, позволяет более точно
определить![]() (рис.
28).
(рис.
28).
![]() Ав(
Ав(![]() )=
)=![]() ,
,![]()
Акр(![]() )=
)=![]()
![]()
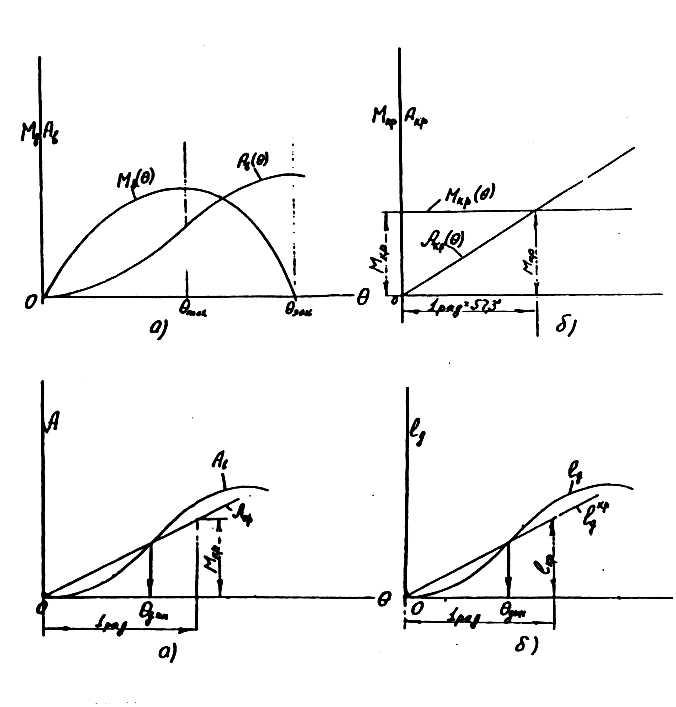
Кривая
![]() Ав(
Ав(![]() )
является интегральной по отношению
кМв, поэтому
обладает характерными свойствами
интегральных кривых: при
)
является интегральной по отношению
кМв, поэтому
обладает характерными свойствами
интегральных кривых: при![]() =0
и
=0
и![]() =
=![]() зак-Мв=0, а на
кривойАв(
зак-Мв=0, а на
кривойАв(![]() )
минимум при
)
минимум при![]() =0и максимум при
=0и максимум при![]() зак;
при
зак;
при![]() - максимум кривойМв(
- максимум кривойМв(![]() )
и точка перегиба кривойАв(
)
и точка перегиба кривойАв(![]() )
(рис.28а).
)
(рис.28а).
Мкр– постоянная, поэтомуАкр– прямая, проходящая через начало
координат (формула 47), так как при![]() =0-
=0-![]() Акр=0 а при
Акр=0 а при![]() =1рад
- Акр= Мкр(рис.
=1рад
- Акр= Мкр(рис.![]() 28б).
28б).