

Laba_3
.docxМинистерство образования и науки Российской Федерации
Федеральное государственное бюджетное образовательное учреждение высшего образования «Владимирский государственный университет имени Александра Григорьевича и Николая Григорьевича Столетовых»
(ВлГУ)
Институт Информационных технологий и радиоэлектроники (ИИТР)
Кафедра: «Биомедицинские и электронные средства и технологии» (БЭСТ)
Лабораторная работа № 3
на тему: «Моделирование систем управления в пакете SIMULINK»
по дисциплине: «Основы управления техническими системами»
Вариант 6
Выполнил:
ст. гр. БТС-115
Лосева Е. С.
Принял:
доц. Долгов Г.Ф.
Владимир 2018
Цель работы: освоение методов моделирования линейных систем в пакете Simulink.
Задачи работы:
-
научиться строить и редактировать модели систем управления в пакете Simulink
-
научиться изменять параметры блоков
-
научиться строить переходные процессы
-
научиться оформлять результаты моделирования
-
изучить метод компенсации постоянных возмущений с помощью ПИД-регулятора.
Описание системы:
В работе рассматривается система управления судном по курсу. Ее структурная схема показана на рисунке 1.
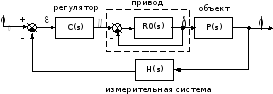
Рисунок 1 - Структурная схема системы стабилизации судна на курсе.
Линейная математическая модель, описывающая рыскание судна, имеет вид:

где
 – угол рыскания (угол отклонения от
заданного курса),
– угол рыскания (угол отклонения от
заданного курса),
 – угловая скорость вращения вокруг
вертикальной оси,
– угловая скорость вращения вокруг
вертикальной оси,
 – угол поворота вертикального руля
относительно положения равновесия,
– угол поворота вертикального руля
относительно положения равновесия,
 –
постоянная времени,
–
постоянная времени,
 –
постоянный коэффициент, имеющий
размерность рад/сек.
Передаточная функция от угла поворота
руля к углу рыскания запишется в виде:
–
постоянный коэффициент, имеющий
размерность рад/сек.
Передаточная функция от угла поворота
руля к углу рыскания запишется в виде:
 .
.
Привод
(рулевая машина) приближенно моделируется
как интегрирующее звено, охваченное
единичной отрицательной обратной
связью, так что его передаточная функция
равна:
 .
.
Для
измерения угла рыскания используется
гирокомпас, математическая модель
которого записывается в виде апериодического
звена первого порядка с передаточной
функцией
 .
.
Исследуются
переходные процессы в системе при
использовании ПД-регулятора:
 ,
и ПИД-регулятора
,
и ПИД-регулятора
 .
.
Ход работы:
-
Исследование системы с ПД-регулятором.
Запускаем пакет SIMULINK, создаем новую модель с помощью File – New – Model, перетаскиваем 4 блока Transfer Fcn (передаточная функция) из окна Simulink Library Browser (группа Continuous) в окно модели и вводим числитель и знаменатель передаточной функции модели судна, привода, регулятора и гидрокомпаса с помощью команд двойным щелчком на блоке:
- Numerator [K]
- Denominator [Ts 1 0], [Tv 1 0], [TR 1 0], [Tос 1 0] соответственно.
Подписываем блоки, сохраняем как lab3.mdl, выбираем цвета блоков с помощью ПКМ на блоке,Format – Background color. Далее добавляем блоки sum из группы Math Operations и установите его слева от регулятора, второй вход ставим на ‘-‘ с помощью двойного щелчка на блоке, вводим |+- в поле List of signs; добавляем блок Step из группы Sources и установите его слева от сумматора и подписываем Заданный курс. Устанавливаем время подачи сигнала 0 и величину сигнала 10 (исследуем поворот на 10 градусов) с помощью двойного щелчка на блоке:
0 в поле Step time
10 в поле Final value.
Затем соединяем все блоки нужным способом, также добавляем два блока Scope (осциллограф) из группы Sinks и устанавливаем их в правой части Руль и Курс.
-
Передаточная функция ПД-регулятора, обеспечивающего переходный процесс минимальной длительности:
 ,
,
где
Кс
= 0.712 рад/сек,
 сек,
сек,
 сек,
TR
= 1 сек, Тос
= 1 сек.
сек,
TR
= 1 сек, Тос
= 1 сек.
Модель системы с ПД-регулятором предст авлена на рисунке 2:
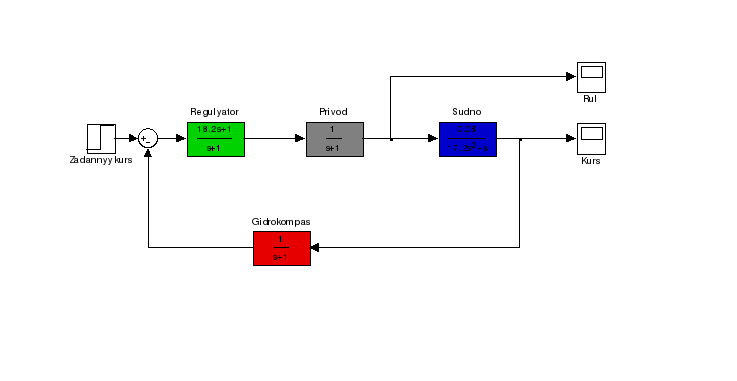
Рисунок 2 - Модель системы с ПД-регулятором.
-
Устанавливаем время моделирования 100 секунд с помощью Simulation – Simulation parameters 100 в поле Stop time, выполняем моделирование, открыв окна блоков Курс и Руль, смотрим результаты моделирования, затем, чтобы результаты моделирования передавались с обоих блоков Scope в рабочую область Matlab в виде матриц, в которых первый столбец – время, а второй – сигнал (курс или угол поворота руля) необходимо выполнить: вкладка Data history
![]()
![]()
Variable name:
phi (Курс) или
delta (Руль)
Format: Array
Снова
выполняем моделирование, затем переходим
в командное окно Matlab
и создаем новое окно для графика. В одном
окне будут построены две кривых на
разных осях. Разбиваем окно на 2 части
по вертикали и делаем активным первый
график. Первое число в команде subplot
означает количество ячеек с графиками
по вертикали, второе – по горизонтали,
третье – номер ячейки, которую надо
сделать активной. Строим график изменения
курса. В команде plot
сначала указывают массив абсцисс, затем
– массив ординат. Двоеточие означает,
что используются все строки. Вводим
заголовок графика. Вводим названия осей
координат. Внутри апострофов для ввода
греческих букв разрешается использовать
команды LaTeX,
Например, «\phi»
означает греческую букву
 ,
а «\delta»
– букву
,
а «\delta»
– букву
 .
Аналогично строим во второй ячейке
график изменения угла поворота руля,
используя данные из массива delta,
полученного в результате моделирования
(см. рисунок 3).
.
Аналогично строим во второй ячейке
график изменения угла поворота руля,
используя данные из массива delta,
полученного в результате моделирования
(см. рисунок 3).
>> figure(1);
>> subplot(2, 1, 1);
>> plot(phi(:,1),phi(:,2));
>> title('Курс');
>> xlabel('Время, сек');
>> ylabel('\phi, градусы');
>> subplot(2, 1, 2);
>> plot(delta(:,1),delta(:,2));
>> title('Угол поворота руля');
>> xlabel('Время, сек');
>> ylabel('\delta, градусы');
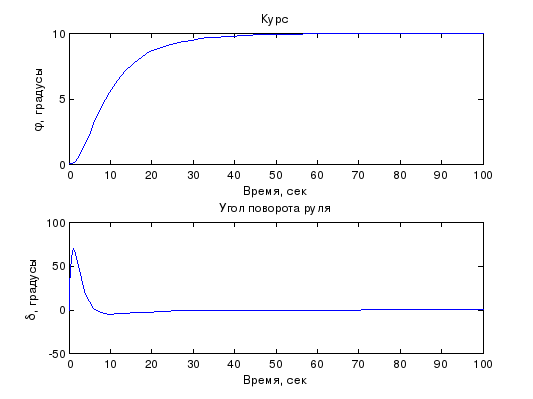
Рисунок 3 – График курса и угла поворота руля.
Удаляем в окне модели связь между приводом и объектом. Добавляем еще один блок Sum из группы Math Operations и устанавливаем его на освободившееся место. Настраиваем расположение входов и выхода так, чтобы первый вход был в верхней части круга. Двойной щелчок по блоку ++| в поле List of signs.
Исследуем реакцию системы на постоянный сигнал, приложенный непосредственно к входу объекта. Он может моделировать какое-то постоянное возмущающее воздействие, например, влияние ветра.
Копируем блок Заданный курс, перетащив его правой кнопкой мыши, и устанавливаем для него величину скачка 2 градуса и называем Возмущение. Подключаем его выход к новому сумматору. Достраиваем нужные соединительные линии. Перетаскивание ПКМ. Двойной щелчок по блоку, 2 в поле Final Value, двойной щелчок по имени
Модель системы с ПД-регулятором с учетом внешнего возмущения представлена на рисунке 4:
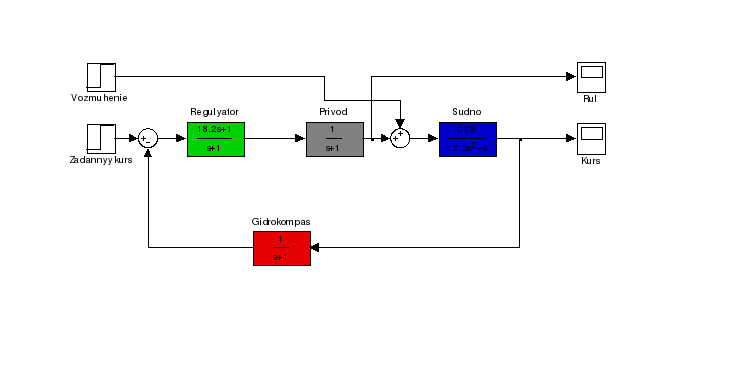
Рисунок 4 - Модель системы с ПД-регулятором с учетом внешнего возмущения.
Увеличиваем время моделирования до 500 и выполняем моделирование. Simulation – Simulation parameters - Stop time (см. рисунок 5):
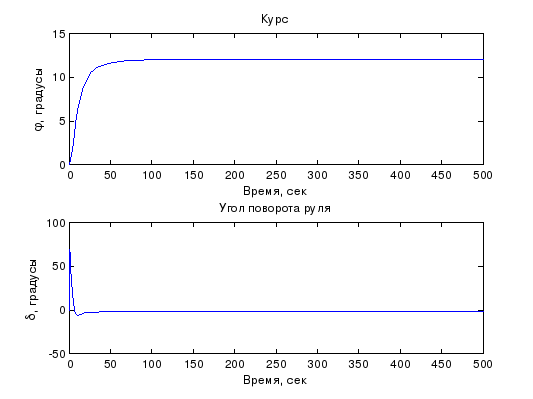
Рисунок 5 - Модель системы с ПД-регулятором с временем регулирования 500 секунд.
Строим передаточную функцию по возмущению замкнутой системы с ПД-регулятором и находим коэффициент усиления в установившемся режиме и рассчитываем установившееся значение сигнала выхода при заданном курсе 10 градусов и постоянном возмущении, эквивалентном 2 градусам поворота руля.
Передаточная функция по возмущению замкнутой системы с ПД-регулятором:
>> W = C*G / (1 + C*G*H)
W =
1.376 s^4 + 2.832 s^3 + 1.536 s^2 + 0.08 s
----------------------------------------------------------------------------
295.8 s^7 + 921.9 s^6 + 991.7 s^5 + 402 s^4 + 38.78 s^3 + 2.456 s^2 + 0.08 s
Судно с ПД-регулятором не вышло на заданный курс 10 градусов, потому что функция имеет нули в s=0.
Статический
коэффициент усиления k=0.712,
установившееся значение сигнала выхода
должно быть равно
 =14.24,
потому что постоянное возмущение, равное
2, напрямую суммируется с установившимся
значением сигнала в отсутствии возмущения,
равным 10;
эти данные согласуются с результатами
моделирования.
=14.24,
потому что постоянное возмущение, равное
2, напрямую суммируется с установившимся
значением сигнала в отсутствии возмущения,
равным 10;
эти данные согласуются с результатами
моделирования.
-
Исследование системы с ПИД-регулятором.
Добавляем
интегральный канал, получается
ПИД-регулятор. Подключаем параллельно
регулятору интегрирующее звено с
передаточной функцией
 ,
,
 сек.
сек.
Передаточная функция ПИД-регулятора:
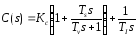 ,
,
где
Кс
= 0.08 рад/сек,
 сек,
сек,
 сек,
TR
= 1 сек, Тос
= 1 сек,
сек,
TR
= 1 сек, Тос
= 1 сек,
 сек,
сек,
Модель системы с ПИД-регулятором с учетом внешнего возмущения представлена на рисунке 6.На рисунке 7- результаты моделирования.
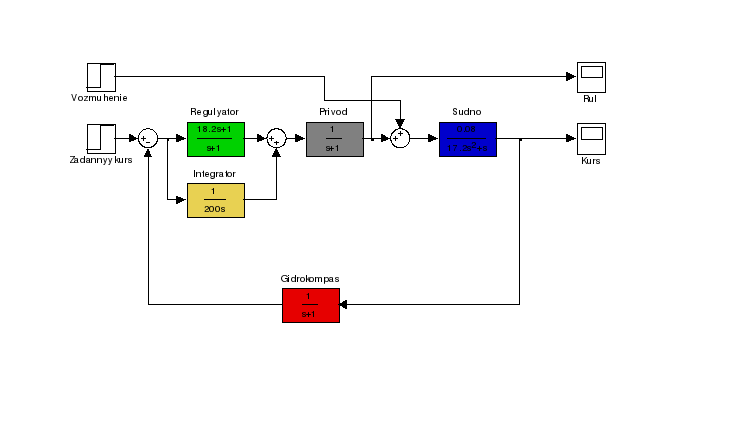
Рисунок 6 - Модель системы с ПИД-регулятором с учетом внешнего возмущения.
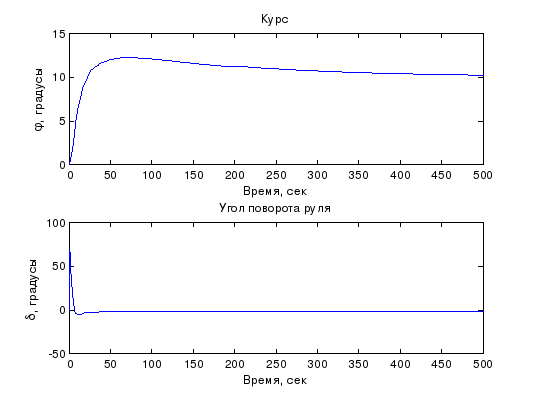
Рисунок 7 - Модель системы с ПИД-регулятором с учетом внешнего возмущения (результаты моделирования).
Передаточная функция по возмущению для системы с ПИД-регулятором:
>> W = C*G / (1 + C*G*H) передаточная функция
W =
295.8 s^7 + 921.9 s^6 + 1267 s^5 + 968.4 s^4 + 346 s^3 + 18.46 s^2 + 0.08 s
-----------------------------------------------------------------------------------
5.917e004 s^8 + 184384 s^7 + 198344 s^6 + 80408 s^5 + 7755 s^4 + 491.2 s^3 + 16 s^2
При использовании ПИД-регулятора судно выходит на заданный курс, потому что благодаря входящему в систему интегратору передаточная функция по возмущению принимает значение 0 при постоянном возмущении.
Статический
коэффициент усиления ks=0.0125,
установившееся значение сигнала выхода
должно быть равно
 =10;
эти данные согласуются с результатами
моделирования.
=10;
эти данные согласуются с результатами
моделирования.
Переходные процессы в системах с ПД- и ПИД-регуляторами (см.рисунок 8):
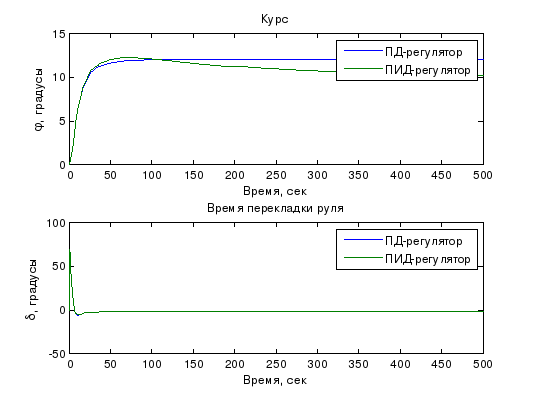
Рисунок 8 – Переходные процессы в системах с ПД- и ПИД-регуляторами.
При использовании ПИД-регулятора вместо ПД-регулятора судно выходит на курс вне зависимости от внешнего возмущения, при этом сигнал управления практически не изменился. Но в то же время, при использовании ПИД-регулятора, в первые минуты происходит значительное отклонение от курса (перерегулирование возросло).
Передаточная функция разомкнутой системы с ПИД-регулятором:
0.08
----------------------------------
17.2 s^4 + 35.4 s^3 + 19.2 s^2 + s
Запасы
устойчивости: по амплитуде gm
=15.2 дБ, по фазе
 =55.3
градуса, запасы являются достаточными.
=55.3
градуса, запасы являются достаточными.
Вывод: в результате выполнения лабораторной работы освоены методы моделирования линейных систем в пакете Simulink.