

Rad
.pdf1. Классификация систем РА
Системы РА – автоматические системы, кот. используются в радиотехнических системах.
По хар-ру задающего воздействия:
С-ы стабилизации (λ(t) – const #с-а авто стабилизации частоты и напряжения);
С-ы прогр. упр-я (λ(t) опис-ся детерм. ф-ей t #с-а упр-я антенной радиолокатора в режиме поиска);
Следящие с-ы (λ(t) – случ #с-а авто сопр-ия движ-ся объекта по напр-ю).
По пар-ру воздействия:
Фазовая (пар-р фаза) автоподстройка;
Частотная (частота);
Временная (врем. положение);
Угловая (направ-е прихода радиосигнала)
Взав-ти от хар-ра ур-ия:
Непрерыв. и дискрет.
Лин. и нелин.
Стац (пар-ры const) и нестац. (пар-ры меняются)
2. Системы АПЧ
Исп-ся д/стабил-ции частоты ген-в колебаний, д/поддержания const промеж. частоты сигнала, в кач-ве узкопол. фильтров, перестр-х по частоте…
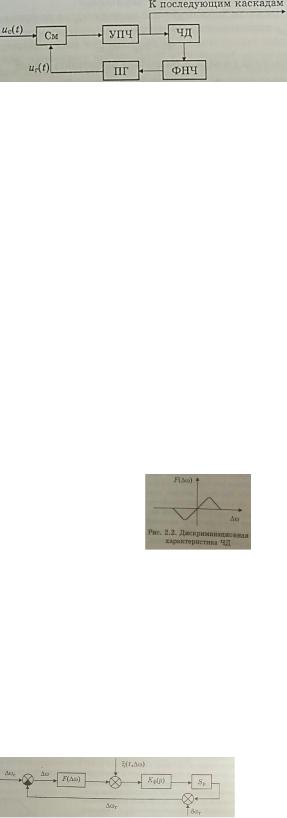
Вх. Сигн. Uc(t) преобразуется в См на промежут частоту, усиливается УПЧ и поступает на послед каскады приемника. U с выхода УПЧ подается на ЧД. При появл-ии откл-ий Δω промеж частоты сигнала от ее номинал значения, кот совпадает с переходной частотой дискр-ра, на выходе дискр-ра возникает U, зависящее от величины и знака отклонения Δω. Вых. U, пройдя через ФНЧ, поступает на ПГ и изменяет его частоту так, чтобы исходное рассогласование Δω уменьшилось. В рез-те работы с-ы АПЧ промеж частота сигнала поддерживается близкой к центр. частоте УПЧ.
λ(t) – частота вх. сигнала, y(t) – частота колебаний гетеродина, ОУ – ПГ, ИУ – варикап.
U с выхода ФНЧ, приложенное к варикапу, изменяет C контура ген-ра и, сл-но, частоту ген-ра.
ωпр=ωс-ωг Δω=ωпр-ωпр0 ωс=ωс0+Δωс ωг=ωг0+Δωг Δω=Δωс-Δωг
3. Системы ФАПЧ
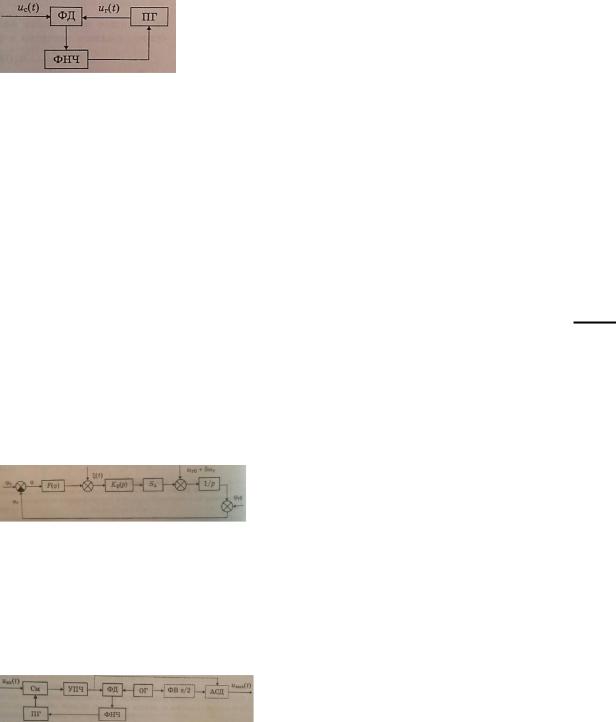
Кол-ия сигнала и ПГ (uc(t) и uг(t)) поступают на ФД. При рассогласии этих напряжений по фазе на выходе ФД появл-ся U, зависящее от величины и знака рассогл-ия. Пройдя через ФНЧ, Uвых дискр-ра изменяет частоту колебаний ПГ. Поскольку фаза кол-ий равна интегралу от его мгн. частоты , то при изм-ии частоты кол-ий гет-на будет меняться его фаза. Управ-ие частотой ПГ ведется до тех пор, пока частоты колебаний сигн. и гет-на не сравняются, а разность фаз не достигнет п/2.
uc(t)=Ucsinφc(t)
uг(t)=Uгcosφг(t) – полн. фазы кол-ий сигн и ПГ
φс(t)=φc0+∫0 ( )
На выходе ФД формир-ся U.
φ(t)=φc(t)-φг(t)
ФД перемножает напр-ия на его входе: д( ) = 2 г sin ( ). При φ=0 uс и uг сдвинуты по фазе на 90.
г( ) = г0 + ∫0 г( ) – переход от частоты ПГ к фазе ПГ, т.к. в ФД напряжения сигнала и ПГ сравниваются по фазе.
Операцию интегрирования на схеме отображает блок 1/p.
Прим-ся в кач-ве узкопол. следящих фильтров, в качестве демодуляторов сигналов с частотной и фазовой модуляцией, для стабилизации промежуточной частоты сигнала…

Достиг-ся еще и «привязка» фазы кол-ий сигн на промеж частоте к фазе кол-ий ОГ. Это позв-т проводить синхр. ампл. детект-ие вх. сигнала.
4. Системы автомат. сопровождения по направлению движ-ся объектов (ДО)
Полож-ие ДО опред-ся расстоянием D и направ-м из начала коор-т на этот объект. Направ-е на объект опред-ся азимутом и углом места.
Азимут – угол α, угол места – φ.
Измерение угловых координат ДО осущ-ся системой
АСН.
СП – 2канал. следящий привод, посредством которого осущ-ся поворот антенны в двух плоскостях. Пеленгационное уст-во, сост. из антенной сист. и приемника, в кот. проводится обработка принятого сигнала.
Современные системы АСН строятся как моноимпульсные с-ы, в кот измерение угл. к-т сопровожд-го объекта осущ-ся по одному отражму от объекта импульсу. В этом случае в антенной с-е форм-ся одновременно в каждой из плоскостей 2 остронапр-ые перекрыв-иеся ДН. При этом внутри ДН форм-ся равносигнальное направление, облад-ее. св-ом: при совпадении его с напр-м на объект, наз. линией визирования (ЛВ), напряж. на выходе дискриминатора равно нулю.
Амплитудный способ пеленгации: 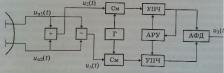 Исп-ся суммарно-разностный метод
Исп-ся суммарно-разностный метод

Сформир-ые на выходе ант-волновод тракта сум. и разност-ое напр-ия поступают на соотв. каналы прием. у-ва, где преоб-ся по частоте, усился и подаются на АФД. В рез-те перемнож-я разност. напр-ия с сум-м в АФД на его выходе появл-ся const U, зависящее от величины и знака угл. рассогл-ия.
С-а АРУ раб-т по Uвых УПЧ сум. сигнала, позв-т ослабить влияние изм-ий ампл-ды сигнала на хар-ки пеленгатора.
АСН состоит из 2 след-их с-м, в кот λ(t) – азимут или угол места. y(t)
– угол, опред-ий полож-ие РСН. ОУ – антенна АСН
Ур-ие, опис-ее поведение угломер. следящей системы: = ц − а. Напряжение на выходе детектора: д( ) = (Θ) + ( , ).
Зависимость (Θ) выходного напряж. пеленгатора от рассогласования Θ называется пеленгационной хар-кой. Преобразование напряженияд( ) ФНЧ с операторным коэф передачи ф( ) опис. выраж.
ф( ) = ф( ) д( ).
5. Система АРУ
Эта с-а широко прим-ся в радиоприемных уст-х и предназначена для стабилизации уровня сигнала на выходе усилителей при большом динамическом диапазоне изменения входного сигнала.
Системы АРУ делятся на три вида: с обр.связью, без обр. связи и комбинированные.

Вход. напряж-е поступает на РУ (рег. усил-ль). Вых. напряж-е этого усил-ля детект-ся, усил-ся УПТ, проходит через ФНЧ и поступает в виде управ. напряж-я на усил-ль, изменяя его Ку. Завис-ть КУ усилителя вх. сигнала от управ. напряжения наз. регулир. хар-кой. Ее можно записать как: ( ) = 0 − .
Эффект стабил-ции uвых(t) достиг-ся засчет того, что с ростом uвых(t) увел-ся и uу(t), под д-м кот умен-ся КУ усил-ля вх сигнала, что приводит к снижению ур-я вых сигнала. Для того чтобы не снижать усил-е на слабых входных сигналах и начать упр-ие КУ усил-ля только при достиж-ии вх сигналом опред. уровня, в с-у АРУ подают uз. В резте uу появ-ся только в том случае, когда напр-ие с АД превысит uз. ФНЧ сглаживает сигнал
Напр-е на выходе системы: вых = ( ) вх = (0 − ) вх.
!!!6. Обобщ. структ. схема. Дискрим. хар-ка.
Штриховой линией обозначен дискриминатор. F(x)-безынерционное нелинейное звено. Звено с операторным коэффициентом передачи К(р) описывает преобразование uдис(t), происходящее в Ф и ГОС. Операторный КП K(p) зависит как от операторного КП фильтра Кф(р), так и от типа и пар-в управляемого ГОС. В АПЧ K(p)=Kф(p)*Sр, в
ФАПЧ K(p)= Kф(p)*Sр/p

Из обобщ. струк. схемы следует, что в ней выполняются соотн-ия:
( ) = ( ) − ( ),
( ) = ( )[( ) + (, )]. Если ошибка слежения достаточно мала, то дискр. хар-ку можно линеаризовать и записать в виде ( ) = д . В этом случае диф. ур. становится линейным и приним. вид:
[1 + д ( )]( ) = ( ) − ( )( ). Тогда:
Пользуясь обобщенными стр. схемами, можно с единых позиций рассмотреть ряд вопросов описания, анализа и синтеза систем радиоавтоматики безотносительно к их назначению.
Дискрим. хар-ка – зависимость детерминированной составляющей выходного напряж-ия дискр-ра F(x) от ошибки слежения x.
Дискрим. хар-ка имеет огр. раствор по оси х. Выход ошибки слежения за пределы раствора этой хар-ки приведет к размыканию следящей системы и срыву слежения. Чтобы система вошла в режим слежения, необх. уменьшить первоначальную ошибку, что достигается в процессе поиска значения отслеживаемого пар-ра сигнала.

!!!7. Передаточная функция. Комплексный КП.
Преобразование Лапласа: pt Описание линейной системы:
L x(t) x(t) e dt x( p)
0
A(t) y(t) B(t) (t)
где |
n |
d |
k |
|
|
||
|
A(t) ak |
|
|
|
dt |
k |
|
|
k 0 |
|
|
|
|
|
,
и
B(t) bk |
d k |
– дифференциальные операторы. |
n |
k |
|
k 0 |
dt |
|
|
|
Применив |
преобразование |
|
Лапласа к |
левой и |
правой частям |
|||||||
уравнения, |
получим: A( p) y( p) B( p) ( p) y( p) |
B( p) |
( p) K ( p) ( p) , |
где |
n |
и |
||||||
A( p) ak pk |
||||||||||||
|
A( p) |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
k 0 |
|
||
|
|
|
|
|
|
|
|
|
|
|
||
n k – алг. операторы, |
p |
d . |
|
|
|
|
||||||
B( p) bk p |
|
|
dt |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|||||
k 0 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||
Передаточная функция (ПФ) системы – коэффициент |
K ( p) , уст-щий |
|||||||||||
связь между изображениями по Лапласу входного воздействия (t) |
и |
|||||||||||
отклика системы y(t) , K ( p) |
B( p) |
. |
|
|
|
|
||||||
|
|
|
|
|
||||||||
|
|
A( p) |
|
|
|
|
|
|
|
|||
x(t)=λ(t)-y(t) |
|
|
|
|
|
|
|
|
|
|
|
|
y(t)=K(p)[Sд*x(t)+ξ(t)]
Подставить второе в первое и выразить x(t). 1дробь=Kλx(p), 2=- Kξx(p). Это ПФ-ии.
Подставить первое во второе и выразить y(t). 1дробь=Kλy(p), 2=Kξy(p). Это ПФ-ии.
K ( p) – ПФ, связывающая процессы в замкнутой системе с
Kuv ( p) пр
1 Kр ( p)
отрицательной обратной связью, где Kпр ( p) – ПФ прямой цепи, то есть участка схемы от точки приложения воздействия u(t) до точки, где мы наблюдаем процесс v(t) ; Kр ( p) – ПФ разомкнутой системы.
Посл-но соед-е звенья: Kuv(p)=K1(p)*K2(p) Парал. звенья: Kuv(p)=K1(p)+K2(p)
Компл. КП – коэф, связыв-ий компл. ампл-ды вх. возд-ия и отклика. K(jw)=K(p), мб представлен в алг. и показат. форме.
|K(jw)|=A(w) опр-т АЧХ. Опр-т зав-ть от частоты отношения ампл-д кол-ий на выходе и входе.

Arg(K(jw))=ψ(w) опр-т ФЧХ. Опр-т зав-ть от частоты фаз. сдвига м-у вых и вх кол-ми.
!!!8. Импульсная переходная хар-ка
ИХ – отклик невозбужденной системы на воздействие в виде δ- импульса.
Если в A(t) y(t) B(t) (t) λ(t) заменить на δ(t), то y(t)=h(t):
A(t)h(t)=B(t)δ(t)
Преоб. Лапласа: A(p)h(p)=B(p)δ(p),
n |
и |
n |
A( p) ak pk |
B( p) bk pk |
|
k 0 |
|
k 0 |
Отсюда: ( ) = (( )) ( ) = ( )( ). Но δ(p)=1, тогда h(p)=K(p) и( ) = 21 ∫0∞ ( )
Т.о., ИХ опр-ся с помощью обр. преоб-я Лапласа от ее ПФ. Усл-я: h(t)=0 при t<0 – усл. физ. Реализуемости;
∫0∞ ( ) < ∞ - усл. Устойчивости
!!!9. Условия устойчивости. Анализ устойчивости
Линейная система называется устойчивой, если при выведении её внешним воздействием из состояния равновесия она возвращается в него после прекращения этого воздействия.
Необходимо учитывать инерционные свойства каждого элемента. Фильтр ФНЧ имеет наибольшие инерционные свойства.

Системы устойчивы, если свободная составляющая движения yc(t) с течением времени затухает.
Система устойчива только тогда, когда все вещественные корни характеристического полинома A( p) a0 a1 p ... an pn 0 отрицательны, а все комплексные корни имеют отрицательные вещественные части.
Об устойчивости системы можно судить по корням знаменателя
передаточной функции. K ( p) B( p)
A( p)
10. Анализ устойчивости с помощью алг. критерия. Критерий устойчивости Гурвица
(1) Необходимым (но не достаточным) условием устойчивости системы является положительность всех коэффициентов характеристического полинома A( p) a0 a1 p ... an pn .
При положительности всех коэффициентов система мб устойчивой, но мб и неустойчивой. Если же не все коэффициенты положительны, то система наверняка неустойчива и никаких дополнительных исследований устойчивости не требуется.
Доказательство: A( p) an pn an 1 pn 1 ... a0 an ( p 1)( p 2 )...( p n )
Раскрыв скобки и приравняв коэффициенты при одинаковых степенях переменной p в левой и правой частях равенства, убеждаемся, что когда система устойчива, т.е. все i 0 , то все коэффициенты характеристического полинома положительны при an 0 .
(2) Для оценки устойчивости системы по критерию Гурвица необходимо из коэф-в хар. полинома составить квадр. матрицу: по главной диагонали записываем коэф-ты от an-1 до a0. Затем каждую