

МІНІСТЕРСТВО ОСВІТИ УРАЇНИ
Тернопільський державний технічний університет імені Івана Пулюя
Кафедра "Комп'ютерно – інтегрованих технологій"
Методичні вказівки
до лабораторної роботи
“Дослідження пневматичної системи циклового програмного керування “АСТА – 412”
по курсу "Елементи і системи гідропневмоавтоматики"
для студентів напряму 6.0925 "Автоматизація та комп'ютерно – інтегровані технології"
ЗМІСТ.
Мета роботи.
-
Порядок виконання роботи.
-
Загальні відомості.
-
Характеристика обладнання .
-
Будова і принцип дії програматора “Aста – 412”.
-
Правила реалізації алгоритмів керування на установці “Aста – 412”.
-
-
Порядок оформлення звіту по роботі.
-
Контрольні запитання.
-
Завдання на удрс.
-
Література.
Мета роботи: Засвоїти принципи складання програм і їх реалізації на пневматичній системі циклового програмного керування “АСТА – 412”.
1. Порядок виконання роботи.
-
Одержати у викладача вихідні дані для розробки програми керування маніпулятором.
-
Виявити основні технічні характеристики системи “АСТА – 412”, а також призначення і розміщення засобів керування на передній панелі.
-
Ознайомитись із правилами розробки програм керування цикловими процесами для установки “АСТА – 412”.
-
Згідно одержаного завдання розробити циклограму переміщень пневмоциліндрів приводу маніпулятора.
-
Виконати з'єднання необхідних штуцерів на лицевій панелі приладу, що реалізували б заданий алгоритм.
-
Перевірити роботоздатність набраної схеми.
-
Оформити звіт по виконаній роботі.
2. Загальні відомості.
2.1. Характеристика обладнання.
Пневматична система AСTA призначена для реалізації функцій циклового програмного керування пневматичними виконавчими механізмами дискретної дії і може бути використана у якості керуючого автомату у складі автоматичної лінії, верстату, маніпулятора. Пристрій “АСТА” модифікації 412 дозволяє реалізувати будь-яку нерозгалужену програму циклового руху чотирьох пневматичних виконавчих механізмів, яка складається не більше ніж з дванадцяти тактів.
Технічна характеристика.
Живлення здійснюється стиснутим повітрям під тиском 0,14МІІа 10 %, очищеним від пилу, масел і вологи у відповідності з ГОСТ 11882 – 73.
Тиск вхідних і вихідних дискретних сигналів:
0 0,01 МПа – логічний “0”;
0,11 0,14 МПа – логічна “1”;
Кількість вхідних сигналів (від датчиків) – до 8;
Кількість вихідних сигналів (до виконавчих механізмів) – до 8;
Кількість керованих виконавчих механізмів – до 4;
Число реалізованих тактів циклу – до 12;
Режими роботи – дистаційний;
– напівавтоматичний;
– автоматичний.
Можливе нарощування вузлів без втручання у внутрішні зв'язки системи шляхом простого стикування систем.
2.2. Будова і принцип дії програматора “аста – 412”.
К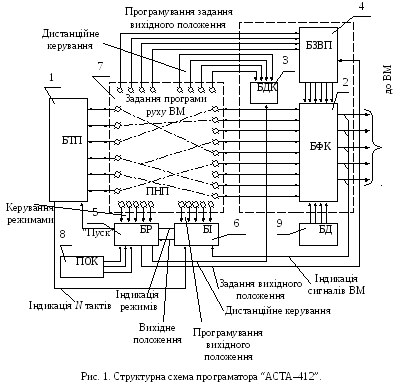 онструктивно
пневматична система програмного
керування “АСТА – 412”
має виглад окремого блоку з апаратурою
на основі елементів НЭМП – ЗО
і
виконання по модульному принципу. На
верхній (лицевій) панелі розміщені
штуцери програмування, індикатори
і
сенсорні пмевмокнопки керування. На
передній стінці розміщено виносний
пульт оперативного керування, а також
штуцери для під’єднання виконавчих
елементів.
онструктивно
пневматична система програмного
керування “АСТА – 412”
має виглад окремого блоку з апаратурою
на основі елементів НЭМП – ЗО
і
виконання по модульному принципу. На
верхній (лицевій) панелі розміщені
штуцери програмування, індикатори
і
сенсорні пмевмокнопки керування. На
передній стінці розміщено виносний
пульт оперативного керування, а також
штуцери для під’єднання виконавчих
елементів.
Система виконує: автоматичне керування виконавчими механізмами у відповідності із заданою цикловою програмою із дискретними технологічними операціями, напівавтоматичне керування виконавчими механізмами (у режимі налагодження), дистаційне керування виконавчими механізмами і автоматичне виведення виконавчих механізмів у вихідне положення у заданій програмній послідовності.
Програма роботи виконавчих механізмів задається встановленням перемичок на полі набору програми. Тут же встановленням заглушок програмується індикація вихідного положення.
“АСТА – 412”, структурна схема якої приведена на рис. 1, складається з:
-
б
 локу
тактового пристрою (БТП),
1;
локу
тактового пристрою (БТП),
1; -
блоку формування команд (БФК), 2;
-
блоку дистаційного керування (БДК), 3;
-
програмованого блоку задання вихідного положення виконавчих механізмів (БЗВП), 4;
-
блоку режимів (БР), 5;
-
блоку індикації (БІ ), 6;
-
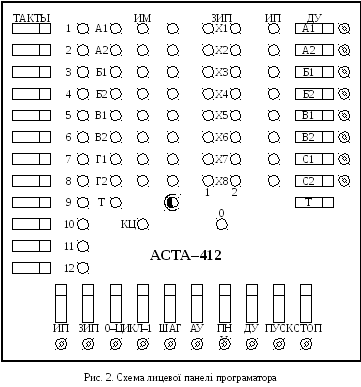
блоку поля набору програми (ПНП), 7, розміщеного на лицевій панелі (рис. 2), на яку виведені для програмуваня штуцери виходів БТП і входів БФК, a також виходів БЗВП, сенсорні пневмокнопки БДК і БР, індикатори БІ;
-
пульту оперативного керування (ПОК), 8;
-
блоку датчиків положення виконавчих механізмів (БД), 9.
В цілому “АСТА – 412” працює наступним чином. У відповіднсті із заданим вихідним положенням виконавчих механізмів на ПНП програмуються (див. рис. 2):
-
індикація вихідного положення – встановленням заглушок на штуцери поля індикації вихідного положення виконавчих механізмів;
-
послідовність виведення у вихідне положення встановленням перемичок на штуцери поля задання вихідного положення.
При вмиканні живлення встановлюютьсяя режими “СТОП”, “ДУ”, “ЦИКЛ 0”. При дотику до сенсорних кнопок дистанційного керування (ДУ – А1, Б2 і т.д.) відповідні їм виконавчі механізми відпрацьовують від БРК.
Дотиком до кнопки “ЗИП” вмикається індикатор “ЗИП”, комплекс “АСТА” приходить у вихідне положення, вмикається індикатор “ИМ” і автоматично відключається режим “задання вихідного положення” із відповідним індикатором. При необхідності режим “задання вихідного положення” може бути вимкнений натисканням кнопки “ДУ”. Далі “АСТА” переводиться в режим автоматичного керування дотиком до кнопки “АУ”і запускається у роботу з допомогою кнопки “ПУСК”. При цьому вмикаються однойменні індикатори. Після відпрацювання всіх тактів циклу відбувається автоматичне короткочасне вимкнення живлення БТП з наступним увімкненям сигналу “ПУСК”, що приводить до роботи тактового пристрою у режимі багаторазового повторення.
При дотику в умовах роботи комплексу до кнопки “СТОП” виконавчі механізми відпрацьовують поточний рух і зупиняються, замість індикатора “ПУСК” вмикається індикатор “СТОП”.
Повторний запуск системи в автоматичному режимі може бути здійснено подачею команди “ЗИП” і після виходу виконавчих механізмів у вихідне положення натисканням кнопки “ПУСК”.
Переведення системи в режим “Цикл 1”, а також знову в “ЦИКЛ 0” може бути здійснене в будь-який момент часу і у будь-якому режимі роботи натисненням відповідних кнопок. У режимі “ЦИКЛ 1” система відпрацьовує всі запрограмовані такти і зупиняється в режимі “АУ СТОП”. Повторне вмикання здійснюється натисненням кнопки “ПУСК”.
Переведення системи в напівавтоматичний налагоджувальний режим здійснюється з режиму “АУ” (“СТОП” або “ПУСК”) натисненням кнопки “ПАУ”, при цьому перемикання тактів програми буде відбуватись при імпульсному натиску кнопки “ШАГ”. Вихід з напівавтоматичного режиму може бути виконаний або в автоматичний режим натисненням кнопки “АУ”, або в режим дистанційного керування – кнопкою “ДУ”.