

2.8. Начало работы в SimPowerSystems
SimPowerSystems содержит набор блоков для имитационного моделирования электротехнических устройств. В состав библиотеки входят модели пассивных и активных электротехнических элементов, источников энергии, электродвигателей, трансформаторов, линий электропередачи и другого оборудования. Имеется также раздел, содержащий блоки для моделирования устройств силовой электроники, включая системы управления для них.
Для начала работы нужно открыть MATLAB, как описывалось выше, открыть окно обозревателя разделов Simulink и выбрать среди списка разделов SimPowerSystems. Для загрузки этой библиотеки нужно нажать на пиктограмму свернутого узла (символ "+"), в правом окне откроется список основных разделов SimPowerSystems (Рис. 1). Некоторые из этих разделов, в свою очередь, состоят из подразделов, но также в списке разделов могут находиться отдельные блоки, например, блок Powergui.
Перечислим основные разделы библиотеки SimPowerSystems:
-
Extra library – дополнительные электротехнические устройства;
-
Application libraries – библиотека приложений;
-
Electrical Sources – источники электрической энергии;
-
Elements – электротехнические элементы;
-
Machines – электрические машины;
-
Measurements – измерительные и контрольные устройства;
-
Power Electronics – устройства силовой электроники;
-
Powergui – графический интерфейс пользователя пакета моделирования энергетических систем.
Методика создания модели SimPowerSystems (SPS-модели) ничем не отличается от методики создания модели на основе базовой библиотеки Simulink. Так же как и для обычной Simulink-модели, необходимо выполнить расстановку блоков на схеме, задать их параметры, соединить блоки и установить параметры расчета модели в целом.
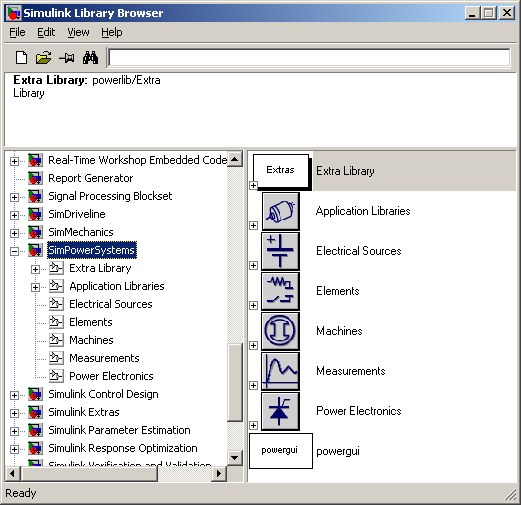
Рис. 1. Основные разделы библиотеки SimPowerSystems
Однако SPS-модели имеют и некоторые особенности:
-
Входы и выходы SPS-блоков, в отличие от блоков Simulink, не показывают направление передачи сигнала и имитируют соединительные клеммы электрических приборов. Таким образом, электрический ток может через вход или выход блока протекать в двух направлениях: как вовнутрь блока, так и наружу.
-
Соединительные линии между блоками являются, по сути, электрическими проводами, по которым ток может протекать также в двух направлениях. В Simulink-моделях же информационный сигнал распространяется только в одном направлении – от выхода одного блока к входу другого.
-
Simulink-блоки и SimPowerSystems-блоки не могут быть непосредственно соединены друг с другом. Сигнал от S-блока можно передать к SPS-блоку через управляемые источники тока или напряжения, а наоборот – с помощью измерителей тока или напряжения.
-
При расчете схемы, содержащей нелинейные блоки, следует использовать методы:
-
ode15s - многошаговый метод переменного порядка (от 1 до 5), использующий формулы численного дифференцирования,
-
ode23tb - неявный метод Рунге-Кутта в начале решения и метод, использующий формулы обратного дифференцирования 2-го порядка в последующем,
которые дают наилучшие результаты по быстродействию.
-
Для расчета SimPowerSystems-модели необходим блок Powergui. Он может находиться в любой части окна модели и используется для хранения данных об эквивалентной Simulink-модели, построенной на основе модели пространства состояний электрической схемы. Если этот блок не был добавлен пользователем, то он добавляется автоматически при запуске модели на расчет.
Блок Powergui, помещенный в модель, позволяет задать начальные значения переменных модели, выполнить расчет установившегося режима, осуществить инициализацию схемы, содержащей электрические машины и найти полное сопротивление (импеданс) цепи.
При расчете модели пользователь имеет возможность выбора метода интегрирования – непрерывного (Continuous method), который использует переменный шаг решения по времени соответствующий шагу по времени в Simulink, или дискретного, с фиксированным шагом. Для систем небольшого размера расчет методом с переменным шагом, как правило, более точен. Алгоритм с переменным шагом работет быстрее, поскольку число шагов оказывается меньшим, чем при расчете с фиксированным шагом и сопоставимой точностью. При расчетах устройств силовой электроники методы с переменным шагом дают большую точность, поскольку определяют прохождение через нуль токов полупроводниковых приборов с высокой точностью так, что не наблюдается разрывов сигналов. Однако для больших систем (систем имеющих большое число переменных состояния или нелинейных блоков) высокая точность непрерывных методов приводит замедлению расчета. При этом под большой системой понимается (условно) система, имеющая более 30 переменных состояния и более 6 ключей. В таких случаях выгодно провести дискретизацию модели.
MATLAB выводит в командном окне предупреждения и рекомендации в случае, если система вообще не имеет continuous states или если в модели есть хотя бы один нелинейный элемент. Следует обращать внимание на эти предупреждения.
Большинство из имеющихся в Simulink методов расчета с переменным шагом дает хорошие результаты при расчете линейных систем. Однако схемы, содержащие нелинейные элементы, требуют других методов решения. Самая высокая скорость расчета нелинейных систем достигается методами ode23tb или ode15s с параметрами, заданными по умолчанию:
-
Solver (метод): ode23tb или ode15s,
-
Relative tolerance (относительная погрешность) = 1e-3,
-
Absolute tolerance (абсолютная погрешность) = auto,
-
Maximum step size (максимальный шаг) = auto,
-
Initial step size (минимальный шаг) = auto,
-
Initial step size (начальный шаг) = auto,
-
Maximum order (максимальный порядок для ode15s) = 5.
Обычно для абсолютной погрешности и максимального размера шага можно выбирать значение аuto. В некоторых случаях приходится ограничивать максимальный размер шага и абсолютную погрешность. Обычными рекомендациями при выборе максимального размера шага являются:
-
шаг не должен превышать величины 0,1 минимальной постоянной времени системы,
-
при наличии в схеме источников переменного напряжения или тока шаг расчета не должен превышать 0,01 – 0,02 периода источника с максимальной частотой.
Выбор абсолютной погрешности зависит от ожидаемых максимальных значений сигналов в схеме. Рекомендуемое соотношение здесь: 0,01-0,001 максимального значения сигнала. Например, если значения токов и напряжений схемы составляют тысячи ампер или вольт, то абсолютная погрешность может быть выбрана 0,1 или даже 1,0. Если же в схеме максимальные значения токов и напряжений лежат в пределах 10-100 ампер или вольт, то абсолютная погрешность должна быть выбрана на уровне 0,001-0,01.