

МИНИСТЕРСТВО ОБРАЗОВАНИЯ
РОССИЙСКОЙ ФЕДЕРАЦИИ
Воронежский государственный технический университет
Кафедра робототехнических систем
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к лабораторным работам № 1,2 по курсу «Автоматизированный электропривод» для студентов специальности 120200 «Металлорежущие станки и инструменты» дневной и вечерней форм обучения
Воронеж 2004
Составители: канд. техн. наук А.К. Муконин
канд. техн. наук В.А. Трубецкой
канд. техн. наук С.С. Ревнёв
УДК 62-83
Методические указания к лабораторным работам № 1, 2 по курсу «Автоматизированный электропривод» для студентов специальности 120200 «Металлорежущие станки и инструменты» дневной и вечерней форм обучения / Воронеж. гос. техн. ун-т. Сост. А.К. Муконин, В.А. Трубецкой, С.С. Ревнёв. Воронеж, 2004. 27 с.
Представлены методические указания к выполнению лабораторных работ «Исследование двигателя постоянного тока» и «Регулирование скорости двигателя постоянного тока».
Предназначены для студентов кафедры АО: дневное отделение – III курс; вечернее отделение – III курс.
Табл. 2. Ил. 13.
Рецензент канд. техн. наук, доц. Ю.С. Слепокуров
Ответственный за издание зав. кафедрой робототехнических систем А.И. Шиянов
Печатается по решению редакционно-издательского совета Воронежского государственного технического университета.
Воронежский государственный
технический университет, 2004
ЛАБОРАТОРНАЯ РАБОТА №1
ИССЛЕДОВАНИЕ ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА
-
Цель работы
Исследовать статические характеристики двигателя постоянного тока (ДПТ) с возбуждением от постоянных магнитов.
По результатам экспериментальных исследований и расчетов построить графики естественной и искусственной электромеханических характеристик, рабочих характеристик, регулировочной характеристики при якорном уравнении.
-
Теоретические пояснения
Неподвижная часть электрической машины называется статором, вращающаяся – ротором. Элемент машины, который создает основной магнитный поток, называют индуктором. Часть машины, на которой размещена силовая электрическая цепь, называется якорем.
Машины
постоянного тока (МПТ) имеют, как правило,
вращающийся якорь и неподвижный индуктор,
создающий поток возбуждения
![]() .
В зависимости от типа индуктора различают
МПТ с возбуждением от постоянных магнитов
и с электромагнитным возбуждением,
когда магнитный поток создается обмоткой
возбуждения, расположенной на главных
полюсах статора. Обмотка возбуждения
запитывается током возбуждения
.
В зависимости от типа индуктора различают
МПТ с возбуждением от постоянных магнитов
и с электромагнитным возбуждением,
когда магнитный поток создается обмоткой
возбуждения, расположенной на главных
полюсах статора. Обмотка возбуждения
запитывается током возбуждения
![]() .
.
О
2![]() .
.
Конструктивная схема классической МПТ с электромагнитным возбуждением с барабанным якорем приведена на рис. 1.1.

1 – стальной корпус; 2 – сердечники главных полюсов; 3 – обмотка возбуждения; 4 – сердечники дополнительных полюсов; 5 – обмотка дополнительных полюсов; 6 – сердечник ротора; 7 – обмотка якоря; 8 – коллектор; 9 – щетки; 10 – вал
Рис. 1.1. Конструктивная схема МПТ с одной парой полюсов
Обмотка дополнительных полюсов включается последовательно с якорем и служит для уменьшения вредного влияния на характеристики машины магнитного потока, создаваемого током якоря, в частности для уменьшения искрения под щетками.
В соответствии со схемой питания обмоток возбуждения и якоря различают машины независимого, последовательного и смешанного возбуждения. Возбуждение от постоянных магнитов относят к независимому.
Машины, спроектированные для независимого возбуждения, иногда включают по схеме параллельного возбуждения, когда якорь и обмотку возбуждения питают от одного источника напряжения.
В технической документации якорь МПТ обозначают в виде рис. 1.2,а, а в учебниках – в соответствии с рис. 1.2,б.
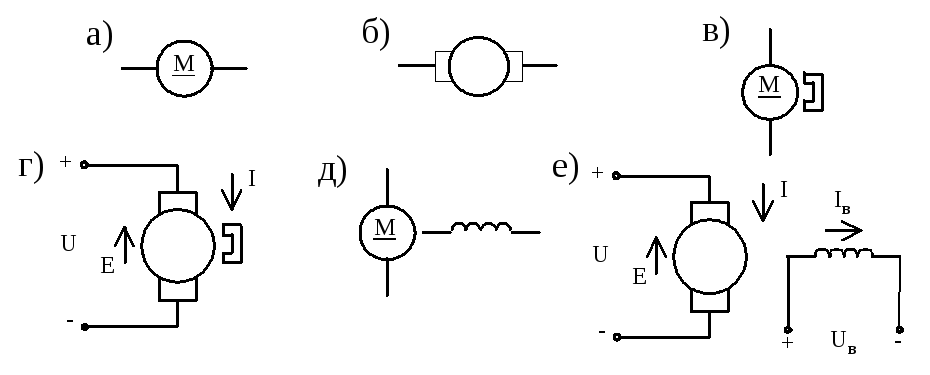 Рис.
2. Условные графические обозначения МДП
Рис.
2. Условные графические обозначения МДП
Условные графические обозначения машины с возбуждением от постоянных магнитов приведены на рис. 1.2,в и 1.2,г, а МПТ с независимым электромагнитным возбуждением – на рис. 1.2,д и 1.2,е.
На
рис. 1.2,г и 1.2,е также обозначены напряжение
![]() и ток
и ток
![]() якоря, напряжение
якоря, напряжение
![]() и тока
и тока
![]() возбуждения. Направления ЭДС якоря
возбуждения. Направления ЭДС якоря
![]() и тока якоря
и тока якоря
![]() соответствуют двигательному режиму
работы.
соответствуют двигательному режиму
работы.
П
4 3![]() ,
пропорциональная скорости ротора
,
пропорциональная скорости ротора
![]() и магнитному потоку
и магнитному потоку
![]() :
:
![]() , (1.1)
, (1.1)
где
![]() – конструктивный коэффициент машины;
– конструктивный коэффициент машины;
![]() .
.
При
взаимодействии тока якоря
![]() с магнитным потоком
с магнитным потоком
![]() создается электромагнитный момент
создается электромагнитный момент
![]() ,
пропорциональный току:
,
пропорциональный току:
![]() . (1.2)
. (1.2)
В
установившемся двигательном режиме
полезный момент
![]() на валу меньше электромагнитного момента
на величину момента холостого хода
двигателя
на валу меньше электромагнитного момента
на величину момента холостого хода
двигателя
![]() :
:
![]() (1.3)
(1.3)
Уравнение движения электропривода:
![]() , (1.4)
, (1.4)
где
![]() – момент нагрузки (статический), в
который включается и
– момент нагрузки (статический), в
который включается и
![]() ;
;
![]() – приведенный к валу двигателя момент
инерции механической части привода.
– приведенный к валу двигателя момент
инерции механической части привода.
Из
(1.4) следует, что в установившемся режиме
![]() ,
то есть электромагнитный момент
определяется моментом нагрузки.
Соответственно и ток якоря определяется
нагрузкой.
,
то есть электромагнитный момент
определяется моментом нагрузки.
Соответственно и ток якоря определяется
нагрузкой.
Уравнение равновесия напряжений якорной цепи в установившемся режиме без учета падения напряжения в щеточно-коллекторном переходе:
![]() ,
(1.5)
,
(1.5)
где
![]() – активное сопротивление цепи якоря.
– активное сопротивление цепи якоря.
Исходя из (1.5), можно получить уравнение статической электромеханической (скоростной) характеристики-зависимости угловой скорости от тока якоря:
![]() ,
(1.6)
,
(1.6)
где
![]() – скорость идеального холостого хода.
– скорость идеального холостого хода.
Механическую характеристику (зависимость скорости от электромагнитного момента) можно получить, исходя из (1.2), (1,6):
![]() . (1.7)
. (1.7)
У двигателей независимого возбуждения графики электромеханической и механических характеристик являются прямыми, поэтому на чертежах их можно совместить – рис. 1.3.

Рис. 1.3. Механические и электромеханические характеристики ДПТ независимого возбуждения
Механическую
и электромеханическую характеристики
при номинальных значениях напряжения
якоря
![]() ,
потока возбуждения
,
потока возбуждения
![]() и отсутствии добавочных сопротивлений
в цепи якоря называют естественными, в
противном случае – искусственными.
и отсутствии добавочных сопротивлений
в цепи якоря называют естественными, в
противном случае – искусственными.
Р
6 5![]() ,
изменением потока возбуждения
,
изменением потока возбуждения
![]() и введением добавочных сопротивлений
(
и введением добавочных сопротивлений
(![]() )
в цепь ротора. В соответствии с этим
различают три способа регулирования
скорости ДПТ – якорное управление
(изменением
)
в цепь ротора. В соответствии с этим
различают три способа регулирования
скорости ДПТ – якорное управление
(изменением
![]() ),
полюсное управление (изменением
),
полюсное управление (изменением
![]() )
и реостатное управление (изменением
)
и реостатное управление (изменением
![]() ).
).
На
рис. 1.3 приведены графики статических
характеристик ДПТ, соответствующие
четырем значениям напряжения якоря при
![]() ,
,
![]() .
Семейство статических характеристик
при изменении
.
Семейство статических характеристик
при изменении
![]() представляет собой ряд параллельных
прямых, проходящих через точки
соответствующих скоростей идеального
холостого хода
представляет собой ряд параллельных
прямых, проходящих через точки
соответствующих скоростей идеального
холостого хода
![]() и токов (моментов) короткого замыкания
и токов (моментов) короткого замыкания
![]() и
и
![]() .
Квадранты I, III
соответствуют двигательному режиму,
квадранты II, IV
– генераторным (тормозным) режимам.
.
Квадранты I, III
соответствуют двигательному режиму,
квадранты II, IV
– генераторным (тормозным) режимам.
На
естественных характеристиках можно
выделить точки номинальных режимов,
когда при номинальном токе якоря
![]() скорость равна номинальной
скорость равна номинальной
![]() .
.
В
машинах с электромагнитным возбуждением
можно изменять магнитный поток
![]() изменением тока возбуждения
изменением тока возбуждения
![]() .
Поток
.
Поток
![]() и ток
и ток
![]() связаны кривой намагничивания.
связаны кривой намагничивания.
Зависимости
скорости
![]() от напряжения якоря при якорном управлении
и от тока возбуждения при полюсном
управлении называют регулировочными
характеристиками. При построении
регулировочных характеристик момент
нагрузки считается равным константе.
Уравнение регулировочной характеристики
при якорном управлении определяется
формулой (1.7).
от напряжения якоря при якорном управлении
и от тока возбуждения при полюсном
управлении называют регулировочными
характеристиками. При построении
регулировочных характеристик момент
нагрузки считается равным константе.
Уравнение регулировочной характеристики
при якорном управлении определяется
формулой (1.7).
Рабочими
характеристиками ДПТ называют зависимости
потребляемой мощности
![]() ,
тока якоря
,
тока якоря
![]() ,
угловой скорости
,
угловой скорости
![]() ,
момента на валу
,
момента на валу
![]() ,
коэффициента полезного действия
,
коэффициента полезного действия
![]() от полезной мощности
от полезной мощности
![]() при номинальных значениях напряжения
якоря и потока возбуждения.
при номинальных значениях напряжения
якоря и потока возбуждения.